XiaoMi-AI文件搜索系统
World File Search Systembiped

在增强学习中利用运动模仿
本文通过模仿动作捕获剪辑来深入研究向机器人和虚拟特征教授高度动态技能的重要领域,这一问题弥合了人类专业知识和机器人的能力之间的鸿沟。它首先仔细检查了当前方法的优势和劣势,引起了他们对复杂,敏捷运动的斗争的关注,并具有适应各种情况的灵活性。基于深度学习,强化学习(RL)和模仿学习的最新进展,我们基于深度限制,以结合这些技术,以优化控制政策,并促进更加敏感,多样化和适应能力的动态技能。我们使用深度关系的运动夹数据来策划我们的方法,并成功地将其部署在Bob Biped机器人上,以进行各种动作,例如步行,跑步和跳跃。此外,还提出了一种课程培训策略,以将我们的算法的适用性扩展到具有不同形状,群众和动力学模型的各种双层机器人,从而推动了机器人技术和现实应用程序的创新。我们的代码和演示可在https://github.com/xiyichen/dh-project上公开获得。
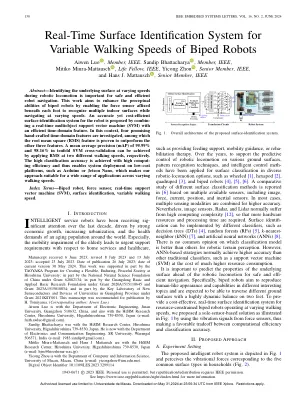
Guihua Wang 实时的表面识别系统,用于可变的双头机器人步行速度 lcnet.pdf-科学技术学院
摘要 - 在机器人运动过程中以不同速度识别基础表面对于安全有效的机器人导航很重要。这项工作旨在通过在每脚下方固定的力传感器来识别多个室内表面,同时以不同的速度导航,从而增强了双子机器人的感知能力。通过将实时多对象支持向量机(SVM)与有效的时域功能相结合,提出了一种机器人的准确但成本较固的表面标识系统。在这种情况下,研究了四个有希望的手工制作的时域特征,其中均方根(RMS)功能被证明超过了其他三个功能。可以通过分别以两个不同的步行速度应用RMS来实现十倍SVM交叉验证中95.99%和98.16%的平均平均精度(地图)。具有较高的计算效率可以实现高分类精度,因此可以在诸如Arduino或Jetson Nano之类的低成本平台上进行系统部署,这使我们的方法适合在各种步行速度之间进行广泛应用。

大脑-身体任务共同适应可以提高自主学习和双足行走的速度
摘要 受到动物大脑和身体共同适应环境的启发,我们提出了一种肌腱驱动和过度驱动(即 n 个关节、n + 1 个执行器)的双足机器人,它 (i) 利用其可反向驱动的机械特性来管理身体与环境的相互作用,而无需明确控制,以及 (ii) 使用简单的 3 层神经网络在仅 2 分钟的“自然”运动喋喋不休(即与腿部和任务动态兼容的探索策略;类似于儿童游戏)后即可学会走路。这种大脑与身体的协作首先学会在“空中”产生脚的周期性运动,并且无需进一步调整,就可以在双足动物放低到与地面轻微接触时产生运动。相比之下,用 2 分钟的“幼稚”运动喋喋不休(即忽略腿部任务动态的探索策略)进行训练,不会在“空中”产生一致的周期性运动,并且在与地面轻微接触时会产生不稳定的运动并且没有运动。当进一步降低双足动物并使期望的腿部轨迹达到地面以下 1 厘米时(导致期望轨迹与实际轨迹之间的误差不可避免),基于自然或幼稚的咿呀学语的周期性运动呈现出几乎同样持续的趋势,并且随着幼稚的咿呀学语而出现运动。因此,我们展示了如何通过植根于植物可反向驱动特性的持续物理适应来驱动在不可预见的情况下不断学习行走,并通过利用植物动力学的探索策略来增强这种适应。我们的研究还表明,受生物启发的肢体和控制策略的共同设计和共同适应可以在没有明确控制轨迹误差的情况下产生运动。

欧洲通票
洛桑联邦理工学院 - EPFL / 纳米电子器件组 (NANOLAB) Route Cantonale, 1015 洛桑,瑞士 基于 CNT 的超级电容器的测试结构 10/2013 – 07/2015 电子和电信领域硕士学位 布加勒斯特理工大学/电子、电信和信息技术学院/硕士课程:微系统 (UPB-ETTI) 论文:用于生物医学和环境应用的压电能量收集器 07/10/2013 – 08/10/2013 电子纳米技术 – 欧洲培训 – 培训师课程 布加勒斯特理工大学/电子、电信和信息技术学院 主要电子纳米技术 10/2009 – 09/2013 电子和电信领域学士学位 布加勒斯特理工大学/电子、电信和信息技术学院信息技术 / 微电子学、光电子学和纳米技术 (UPB-ETTI) 论文:Xilas – 自主双足机器人 10/2009 – 06/2012 心理教育培训 – 1 级 布加勒斯特理工大学 / 教师培训部 06/2010 培训 – 印刷电路板 (PCB) 设计和制造简介 布加勒斯特理工大学 / 电子技术和互连技术中心 09/2005 – 06/2009 学士学位“Vladimir Streinu”国立学院,Găești,Dâmbovița

教育工作经验
•为女武神类人生物开发了一种最先进的运动学模型预测控制器(MPC)。•分析和开发的软件工具,可以用闭合运动环的踝关节机理的设计进行参数化,以优化工作区和扭矩速度配置文件。正在准备研究论文。•创建了机械设计工具,以量化设计NASA的下一代BIPED的性能要求。•使用Unity开发了最先进的虚拟现实(VR)接口,用于低延迟,对Valkyrie的高通量控制作为UI/UX,网络和端到端系统集成的唯一软件工程师。优化的代码,用于点云处理性能,引导库以启用使用ZEDM传感器的远程混合真实性(MR),并强大的基于ROS#的网络协议。•开发了用于系统识别机器人链接惯性的工具,用于准确的乌尔德构建和频率响应工具,可针对基线和调整串联弹性执行器的低级控制器,以适用于下一代。NASA太空技术研究员(NSTRF) @ NASA Johnson太空中心2015年8月 - 2020年5月•通过学习具有神经网络分类器的Loculanipulability区域,开发了一种新型的人形生物的移动操纵方法,并执行一种快速加权的方法,以解决第二秒的运动计划。 •开发了各种技术,用于使用基于顺序的二次编程(SQP)的方法,路径计划算法以及投射基于全体身体控制技术的方法,以及使用顺序二次编程方法(SQP)的方法(SQP)方法来解决单方面和非线性限制的非线性动力学问题和非线性约束。NASA太空技术研究员(NSTRF) @ NASA Johnson太空中心2015年8月 - 2020年5月•通过学习具有神经网络分类器的Loculanipulability区域,开发了一种新型的人形生物的移动操纵方法,并执行一种快速加权的方法,以解决第二秒的运动计划。•开发了各种技术,用于使用基于顺序的二次编程(SQP)的方法,路径计划算法以及投射基于全体身体控制技术的方法,以及使用顺序二次编程方法(SQP)的方法(SQP)方法来解决单方面和非线性限制的非线性动力学问题和非线性约束。•对女武神机器人的串联弹性执行器(SEA)的热性质进行了特征,该特性用于开发新型的热恢复程序。•使用ROS,PCL和Scikit-Learn的3D激光点云数据中的人类进行了监督学习。NASA Pathways Intern(ER4-机器人系统技术分支) @ NASA Johnson航天中心2018年8月 - 2018年5月 - 2019年5月
最终报告 - 机器人技术公司
美国国防部 (DOD) 正在开展多项作战机器人开发项目,但这些项目侧重于开发轮式或履带式车辆平台,而非人形机器人。但人工制品世界是由人类为人类设计的,例如工具、建筑物和车辆。人形机器人拥有双足、灵巧的手臂和手以及足够的智能,可以在那个世界中顺利运行:在建筑物内移动、爬楼梯或梯子、用门把手而不是力量开门、使用现有工具、操作现有机器、驾驶现有车辆以及发射现有武器。在自然环境中,军用轮式车辆可以在地球表面约 30% 的面积上行驶,军用履带式车辆可以在约 50% 的面积上行驶。有腿的生物和机器(包括双足人形机器人)几乎可以在整个陆地表面行走。此外,人类与看起来像人类的机器人互动最容易。虽然许多国家都在致力于开发人形机器人,但日本公司在开发人形机器人方面投入的精力最多。虽然这些机器人具有先进的感知和控制功能,可以实现自主效应器运动(例如行走),但它们在与环境的自主交互方面却受到限制。由于美国在自主智能控制方面更先进(尽管是针对车辆),因此一个有趣的项目是整合美国控制系统
2024年9月6日 - 德国Kaiserslautern
前言,我们希望您参加第27届攀岩和步行机器人国际会议 - Clawar 2024!成立于1997年,Clawar会议已成为国际机器人社区中盛大的年度活动。今年,Clawar 2024是由RPTU KAISERSLAUTERN-LANDAU和信息技术研究中心的RPTU KAISERSLAUTERN-LANDAU和FZI的机器人研究实验室组织的。我们很荣幸欢迎您参加Kaiserslautern市今年的会议。Kaiserslautern是德国西南部莱茵兰 - 帕宁特州的工业和大学城。我们的城市直接附着在德国最大的连续森林的西北边缘。因此,Kaiserslautern在南部和东部被树木繁茂的高度(如Humberg或Kahlenberg)精美。Clawar 2024位于国际知名的研究所弗劳恩霍夫·Zentrum Kaiserslautern中。Clawar 2024涵盖了步行和攀登机器人研究,开发和创新的所有主要领域。除其他外,提出了新的应用和当前趋势,基于AI的感知和控制解决方案,创新的设计概念,康复和专业系统以及双皮亚和四足动物的步行机。,我们为三位著名的全体演讲者以及在其主要研究领域的未来创新提供的创新感到非常自豪。这些是Marco Hutter(27年攀登和步行机器人 - 我们在那里吗?),Alin Albu-Schäffer(扭矩控制或本质上符合?dlr在稳健,有效的双头和四倍的机车上的观点)和navinda kottege(两个,四个或六个?腿部机器人用于现实世界中的探索和检查)。对我们来说,拥有另外两个主题演讲者 - 本杰明·莫蒂斯(Benjamin Mottis)(创建自主机器人的工作)和katja mombaur(人形机器人机器人和外骨骨骼中的双皮亚动力学 - 从基准测试框架中,从基准测试框架中进行了高效控制者),要求对会议的高质量审查,以备受质量的质量,以备受质量的质量。审查过程导致接受了49篇定期论文和14张海报的贡献,中有75份原始提交。在整个会议期间都提出了所有公认的贡献,在14个技术会议上组织,将来自15个国家的领先的机器人研究人员汇总在一起。所有作者的出色工作以及所有审稿人的专业和详细反馈给作者的特殊认可。在学术会谈外,还组织了几项技术和社交活动,以支持整个会议的友好,合作和创新的精神。除其他外,其中包括技术展览,游览和导游。尤其要感谢参展商MAB机器人,Mybot Shop,DFKI机器人创新中心不来梅,DLR机器人和机电机器人学院,ETH的机器人系统实验室,服务机器人实验室,FZI的Service Robotics Lab,FZI,机器Intelligence and Machine Intelligence and Robotics在Kit和Robotics the Robotics for Robots for rptutu kaiesland for rptutu kaiasera for rptutu kaiasera intuutututututututu kaaisera-机器。组织这次会议需要大量工作,我们要感谢所有参与人员的时间和精力。衷心感谢您向我们的主要赞助商,Deutsche Forschungsgemeinschaft(DFG)和Hübner基金会。此外,我们要感谢Fraunhofer中心Kaiserslautern提供的会议地点。我们的真诚感谢也感谢Clawar协会,国际科学委员会,会议的顾问委员会以及国家和地方组织委员会的宝贵支持。