机构名称:
¥ 1.0
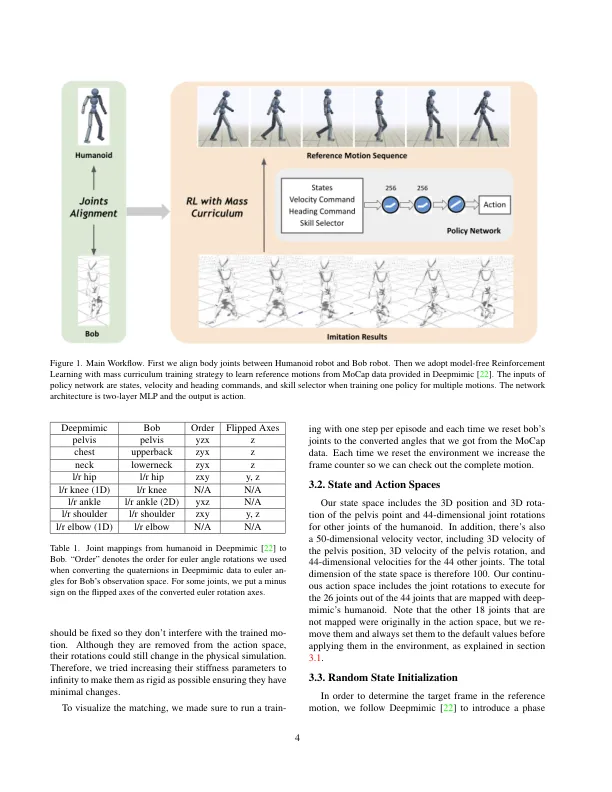
本文通过模仿动作捕获剪辑来深入研究向机器人和虚拟特征教授高度动态技能的重要领域,这一问题弥合了人类专业知识和机器人的能力之间的鸿沟。它首先仔细检查了当前方法的优势和劣势,引起了他们对复杂,敏捷运动的斗争的关注,并具有适应各种情况的灵活性。基于深度学习,强化学习(RL)和模仿学习的最新进展,我们基于深度限制,以结合这些技术,以优化控制政策,并促进更加敏感,多样化和适应能力的动态技能。我们使用深度关系的运动夹数据来策划我们的方法,并成功地将其部署在Bob Biped机器人上,以进行各种动作,例如步行,跑步和跳跃。此外,还提出了一种课程培训策略,以将我们的算法的适用性扩展到具有不同形状,群众和动力学模型的各种双层机器人,从而推动了机器人技术和现实应用程序的创新。我们的代码和演示可在https://github.com/xiyichen/dh-project上公开获得。
在增强学习中利用运动模仿
主要关键词




相关文件推荐