XiaoMi-AI文件搜索系统
World File Search Systemconfigurable

下一代气动声纳浮标发射系统 - L3Harris
MLT 是一个单独的发射站,可用作独立的声纳浮标发射器,也可以配置多个以集成到系统级解决方案中。MLT 的大小可从标准发射容器 (SLC) 中释放单个 A 尺寸声纳浮标,或通过使用适配器释放两个 F 或 G 尺寸浮标。空载时 MLT 重约 10 磅。它的充气压力为 1000 至 5000 psi,并配有浮标传感器以确保正确运载和发射。

边缘点AI快速启动参考
Edgepoint AI是NVIDIA™Jetson Xavier™和Orin™NX的载体板,设计为高度可配置和开放的平台。EdgePoint AI支持多种用例和摄入选项,用于开发和部署AI/ML模型以及边缘的流处理管道。这包括能够通过RF,Vita-49,光学和工业视觉(Cameralink)应用的PCIE Gen 3x8插槽轻松与EDT的I/O接口配对。

N610i 数字标签印刷机
新的 Domino Workflow 将行业标准 Esko Digital Front End v2.0 (DFE) 与新的高速 Domino Screen Pro 筛选器和作业定义文件 (JDF) 服务器相结合,提供高度可配置的工作流程。它可以在全自动模式下使用,也可以在手动控制模式下使用,也可以与 Domino 应用程序编程接口 (API) 结合使用,以形成统一的混合印刷机或在线精加工解决方案。
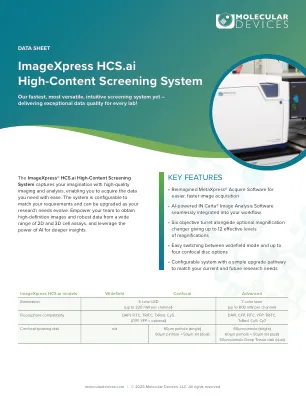
imagexpress hcs.ai高内心筛选系统
imagexpress®HCS.AI高内心筛选系统通过高质量的成像和分析来捕捉您的想象力,从而使您可以轻松地获取所需的数据。该系统可配置以符合您的要求,并且可以随着您的研究需求而升级。使您的团队能够从2D和3D细胞分析中获取高清图像和稳健的数据,并利用AI的功率来获得更深入的见解。
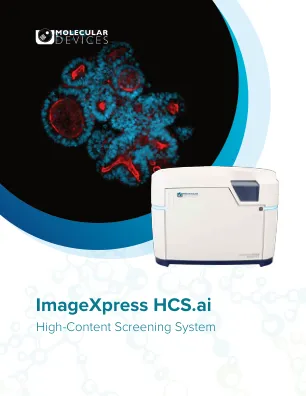
imagexpress hcs.ai高内心筛选系统
imagexpress®HCS.AI高内心筛选系统通过高质量的成像和分析来捕捉您的想象力,从而使您可以轻松地获取所需的数据。该系统可配置以符合您的要求,并且可以随着您的研究需求而升级。使您的团队能够从2D和3D细胞分析中获取高清图像和稳健的数据,并利用AI的功率来获得更深入的见解。

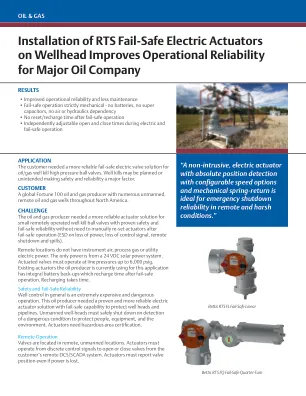
在井口安装 RTS 故障安全电动执行器可提高大型石油公司的运营可靠性
• 无刷直流电机,变频器控制,提供可配置的速度控制 • 低功耗 • 绝对位置检测 • 可挂锁的手动手轮 • 带霍尔效应(非接触式)本地控制站的 LCD 显示屏,带有开-停-关和本地-远程选择旋钮以及连续位置指示 • 显示非侵入式设置和执行器参数 • 5+1 个二进制输入(24 VDC、48 VDC 和 60 VDC) • 8 个可配置数字输出 - ESD 就绪、打开和关闭位置、运行关闭和运行打开方向、过扭矩、选择开关处于本地或远程位置 • 微处理器连续监控所有机械传动系统组件,处于通电和故障安全模式,本地显示本地警报和远程信号 • PST 自动测试模式可将阀门关闭 5%,同时远程开启和关闭功能仍然有效 • 可调故障安全时间使用无摩擦装置(无磨损)的涡流制动器来保护阀门 • 用于现场接线的单独端子室可防止电子设备暴露在环境中 • UL、CSA、ATEX 和 IECEx 认证• 维护间隔长 – 10,000 至 20,000 个运行小时(5 年),艾默生交付后 10 年 • 两年保修
在井口安装 RTS 故障安全电动执行器可提高大型石油公司的运营可靠性
• 无刷直流电机,变频器控制,提供可配置的速度控制 • 低功耗 • 绝对位置检测 • 可挂锁的手动手轮 • 带霍尔效应(非接触式)本地控制站的 LCD 显示屏,带有开-停-关和本地-远程选择旋钮以及连续位置指示 • 显示非侵入式设置和执行器参数 • 5+1 个二进制输入(24 VDC、48 VDC 和 60 VDC) • 8 个可配置数字输出 - ESD 就绪、打开和关闭位置、运行关闭和运行打开方向、过扭矩、选择开关处于本地或远程位置 • 微处理器连续监控所有机械传动系统组件,处于通电和故障安全模式,本地显示本地警报和远程信号 • PST 自动测试模式可将阀门关闭 5%,同时远程开启和关闭功能仍然有效 • 可调故障安全时间使用无摩擦装置(无磨损)的涡流制动器来保护阀门 • 用于现场接线的单独端子室可防止电子设备暴露在环境中 • UL、CSA、ATEX 和 IECEx 认证• 维护间隔长 – 10,000 至 20,000 个运行小时(5 年),艾默生交付后 10 年 • 两年保修

415U-E-Cx 无线以太网网关 - ELPRO Technologies
可配置参数 单元详细信息、I/O 映射、I/O 参数、无线电设置、仪表板、IO Plus 逻辑 DNP3 I/O 和网关(2 级以上)Modbus TCP/RTU 网关 MQTT 客户端 +SparkplugB 嵌入式 Modbus 主/从用于 I/O 传输 用于自动选择无线电路径的频率敏捷参数、流量优先级、带宽效率功能、带宽利用率、冗余、路由、桥接、VLAN