XiaoMi-AI文件搜索系统
World File Search Systemconsiderations
自适应系统的认证注意事项
本研究由 NASA 资助,合同编号为 NNL13AC67T。本材料中表达的任何观点、发现、结论或建议均为作者的观点,并不一定反映 NASA 或美国政府的观点。一些个人为本报告中描述的研究做出了贡献。罗克韦尔柯林斯公司的 Siddhartha Bhattacharyya 提供了总体监督、章节概述和特性描述。罗克韦尔柯林斯公司的 Darren Cofer 开发了有关认证挑战和总体监督的章节。Dave Musliner、Joseph Mueller 和 Eric Engstrom 提供了对智能和自适应控制算法的见解。NASA 兰利研究中心的 Kelly J. Hayhurst 提供了有关自适应系统和认证的宝贵意见。来自学术界、工业界和政府机构的许多研究人员提供了对自适应系统的见解。

空气中的杀虫剂:接触注意事项...
4.1.重要过程 ...................................................................................................................... 75 4.2.任务 ............................................................................................................................ 76 4.2.1.经验方法 ............................................................................................................. 76 4.2.2.机械方法(分析解决方案).................................................................................... 79 4.2.3.数值模型模拟挥发 ............................................................................................. 81 4.3.传输和沉积 - 高斯、拉格朗日、欧拉类型模型 ............................................................................................. 81 4.3.1.传输方法 ................................................................................................................ 82 4.3.2.转换过程 ................................................................................................................ 85 4.3.3.沉积过程 ................................................................................................................ 86 4.4.多媒体模型(包括逸度模型) ............................................................................. 87 4.5.模型收集 ...................................................................................................................... 89 4.6.第 2 步筛选:考虑科学和技术质量标准。92 4.7.模型评估结果 ................................................................................................................ 94 4.7.1.估算农药挥发 .............................................................................................................. 94 4.7.2.估算农药运输和沉积 ............................................................................................. 102 4.7.3.多媒体模型 ............................................................................................................. 109 4.8.空气模型在监管环境中的应用 ............................................................................. 117 4.8.1.短距离运输的现行方法 ............................................................................................. 117

大型操作的可靠性考虑因素...
在过去的几十年里,加速器被开发和优化为探索亚核粒子研究能量前沿的工具。然而,最近,加速器优化的另一个方面变得更加重要,即高度可靠的操作,以产生大量的粒子碰撞(“粒子工厂”)或光子(光源),为庞大而多样化的用户群体服务。可靠性方面对于光源尤其重要。光源拥有由数千名用户组成的庞大用户群体,这些用户组织成小型独立研究团队,每个研究团队仅使用一小部分光束时间。即使由于频繁的故障和中断导致的轻微运营效率低下也可能导致某些研究团队分配的光束时间完全损失,从而严重扰乱他们的科学计划。出于这些原因,人们越来越重视高度可靠的操作。可靠性通常定义为在预定时间段内提供给用户的光束时间的相对总量。95% 的可靠性被认为是现代光源的可容忍下限。经常报告 98% 左右的可靠性值,这并不是不寻常的成就。这意味着,对于计划的每年 5000 小时的光束时间,由于故障,用户操作可能只会损失 250 小时或更少。假设从故障中完全恢复平均需要两个小时,中断之间的时间必须平均大于 40 小时(假设每天 24 小时和每周 7 天运行)。同步辐射科学已经变得非常复杂,光束的传输不再是可靠性的充分标准。用户需要具有计划的光束能量和几乎恒定的强度、高空间稳定性和所有光束参数在操作模式改变后具有高再现性的光束,例如通过改变波荡器磁铁的场强来改变光子能量。加速器由大量有源组件组成,其中许多组件具有高功耗,必须同时运行才能使光束运行。它们通过复杂的数字控制连接和协调,精确计时通常是正常运行的条件。对于拥有 100,000 个此类组件的设施,任何组件可能仅在运行 4 × 10 6 小时后才会失效。
通信卫星的可靠性考虑
在法律规定的某些条件下,图书馆和档案馆有权提供复印件或其他复制品。这些特定条件之一是,复印件或复制品不得“用于除私人学习、学术或研究以外的任何目的”。如果用户请求或随后将复印件或复制品用于超出“合理使用”的目的,则该用户可能要承担侵犯版权的责任,

设备和风险表征的考虑因素
医疗器械软件可以在复杂的社会技术环境中运行——由软件、硬件、信息技术网络和人员组成——这在软件功能、其输入和输出、预期用户以及使用该软件的独特医疗保健环境之间形成了复杂而动态的交互。这种复杂性加上系统的互联性、网络安全需求、开发周期的速度和频率、解决方案的扩展速度以及变更实施的各个方面,有助于准确描述设备和/或其风险状况。医疗器械软件可能带来独特而独特的风险,例如与设备生成和输出的信息以及不同程度的临床自主能力有关的风险。这些设备可以独立使用或作为平台的一部分使用,并且根据预期用途以及与使用和/或错误输出相关的潜在危害,涵盖广泛的风险状况。

种族身份和发展考虑因素/ ... div>
•今天的幼儿比我们国家历史上的任何其他时候都更加多样化。美国有一半以上的婴儿是有色人种。•在零到三的情况下,我们拥抱了国家的婴儿及其家人的不断变化的肖像,并正在努力确保所有婴儿和幼儿的生活都有很强的开端。我们设想了一个具有知识和意愿的社会,以支持所有婴儿和幼儿发挥其全部潜力。我们认识到,由于过去和现在的系统障碍,植根于种族主义和有限的关键资源的机会,例如优质的医疗保健服务,稳定的住房,可靠的收入和就业机会和优质的育儿,该国的婴儿,幼儿和家庭并非同等地共享成长和繁荣的机会。
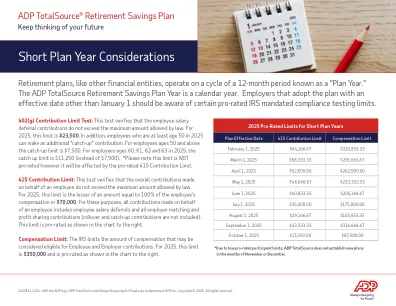
短期计划年度考虑事项
402(g) 缴款限额测试:此测试验证员工工资延期缴款不超过法律允许的最高金额。2025 年,此限额为 23,500 美元。此外,2025 年年满 50 岁的员工可以额外“补缴”。对于 50 岁及以上的员工,补缴限额为 7,500 美元。对于 2025 年年龄为 60、61、62 和 63 岁的员工,补缴限额为 11,250 美元(而不是 7,500 美元)。*请注意,此限额不按比例计算,但会受到按比例计算的 415 缴款限额的影响。