XiaoMi-AI文件搜索系统
World File Search Systemeere

第 01 章 - 电池研发
汽车技术办公室 (VTO) 支持所有美国人都能负担得起的新型、高效、清洁的出行方式的研究、开发、演示和部署 (RDD&D)。该办公室的投资利用国家实验室系统的独特能力和世界一流的专业知识来开发汽车技术的新创新,包括:先进的电池技术;用于轻量化车辆结构和更好动力系统的先进材料;节能出行技术和系统(包括自动化和联网汽车以及联网基础设施的创新,可显著提高系统级能源效率);创新动力系统,以减少难以脱碳的越野、海运、铁路和航空部门的温室气体 (GHG) 和标准排放;以及有助于在社区层面展示和部署新技术的技术集成。通过与能源效率和可再生能源办公室 (EERE) 和美国能源部 (DOE) 的其他办公室协调,VTO 推进技术,确保为所有经济和社会群体的人员和货物提供负担得起的可靠出行解决方案;增强和支持行业和经济/劳动力的竞争力;并解决当地的空气质量以及水、土地和家庭资源的使用问题。

发展性认知神经科学
Sorbonne Universit'E,E,Piti的儿童和青少年精神病学系,E-SALP ˆ etri etri'eere医院,法国巴黎,法国的Institut National de la Sant'E Et De la Recherche M´Edicale,Inserm u a10大学e Paris-Saclay,Ecole Normale Sup´ iRieure Paris-Saclay,CNRS,Center Borelli,Gif-Sur-Yvette; EPS BARTH的精神病学系,法国儿童和青少年精神病学和心理治疗系的Eps Barth´El´emy Durand,大学医学中心,von-Siebold-STR。5, 37075 G ¨ ottingen, Germany u Department of Psychiatry and Neuroimaging Center, Technische Universit ¨ at Dresden, Dresden, Germany v Centre for Population Neuroscience and Stratified Medicine (PONS), Department of Psychiatry and Neuroscience, Charit ´ e Universit ¨ atsmedizin Berlin, Germany w School of Psychology and Global Brain Health Institute, Trinity College爱尔兰X都柏林X人口神经科学与精确医学中心(PONS),脑启发智能科学与技术研究所(ISTBI)(ISTBI),Fudan University,Fudan University,上海,Y,生理学和营养科学系多伦多多伦多的位于加拿大M5S3G3
咨询-ACCESS-案例研究-OPALCO-May-2021.pdf
NRECA Research 的太阳能项目“实现合作社社区公平太阳能资源 (ACCESS)”是 NRECA 推进全民能源获取计划的旗舰项目。随着技术进步继续改变我们的行业,该计划重点介绍了合作社处理社区发展和支持其消费者成员的创新方式。ACCESS 将探索和扩大创新、经济高效的能源获取计划的使用,以帮助提高太阳能的可负担性,特别注重帮助低收入和中等收入 (LMI) 消费者。ACCESS 将研究各种融资机制和计划设计,以确定小型公用事业的最佳解决方案,包括在全国范围内对各种合作社太阳能项目进行现场测试。通过这个项目,将开发工具和资源来协助电力合作社和更广泛的行业部署太阳能项目,使 LMI 消费者受益。本案例研究提供了一个合作社 Orcas Power & Light Cooperative 如何通过一系列合作伙伴关系和创新的混合电池储能系统为其群岛提供太阳能可负担性福利的例子。本材料基于美国能源部能源效率和可再生能源办公室 (EERE) 太阳能技术办公室 (SETO) 奖励编号 DE-EE0009010 资助的工作。

神经元可塑性的生物学知识的多基因评分适度了青少年认知能力和皮质厚度之间的关联
Sorbonne Universit'E,E,Piti的儿童和青少年精神病学系,E-SALP ˆ etri etri'eere医院,法国巴黎,法国的Institut National de la Sant'E Et De la Recherche M´Edicale,Inserm u a10大学e Paris-Saclay,Ecole Normale Sup´ iRieure Paris-Saclay,CNRS,Center Borelli,Gif-Sur-Yvette; EPS BARTH的精神病学系,法国儿童和青少年精神病学和心理治疗系的Eps Barth´El´emy Durand,大学医学中心,von-Siebold-STR。5, 37075 G ¨ ottingen, Germany u Department of Psychiatry and Neuroimaging Center, Technische Universit ¨ at Dresden, Dresden, Germany v Centre for Population Neuroscience and Stratified Medicine (PONS), Department of Psychiatry and Neuroscience, Charit ´ e Universit ¨ atsmedizin Berlin, Germany w School of Psychology and Global Brain Health Institute, Trinity College爱尔兰X都柏林X人口神经科学与精确医学中心(PONS),脑启发智能科学与技术研究所(ISTBI)(ISTBI),Fudan University,Fudan University,上海,Y,生理学和营养科学系多伦多多伦多的位于加拿大M5S3G3
热带和热带气旋对未来美国海上风能的影响
1。引入美国沿海地区的风力涡轮机,包括大西洋,墨西哥湾和加勒比恩海湾,以及东太平洋外大陆架区域,面临热带气旋(TCS)(TCS)和热带气旋(ETCS)的巨大风险。这些极端的天气事件会通过风阵风,快速风向变化,极端的波浪和大量降水,影响涡轮机叶片,地基,电力系统和其他基础设施。关于极端天气负荷的历史数据有限,从而使脆弱性评估具有挑战性。例如,由于米托斯元素条件低估,北海80%需要维修(Diamond 2012)。尽管在欧洲海上风能系统中产生了这些恶劣的天气影响,但这种情况并不代表美国近海地区的极端状况,造成飓风有时会袭击。相反,位于北太平洋西部的亚洲海上涡轮机遭受了台风的破坏(Li等人2022)尽管几乎无法获得详细的损害评估和数据共享。为了实现拜登 - 哈里斯政府的目标,到2030年,有必要将海上风能开发扩大到美国飓风的美国地区并应对技术挑战(Musial等人。2023)。这种扩展需要了解系统鲁棒性的风险,改善和建立弹性,尤其是面对北大西洋越来越频繁的主要飓风(Vecchi等人)(Vecchi等人。2021)。到此为止,主持了两次面对面的研讨会。1)。当前的工程实践遵守国际电子技术委员会(IEC)标准,对于热带参考涡轮级(T级)涡轮机,该标准要求将参考风速从50增加到57 m s-1。此外,这些实践需要湍流的极端风速模型,该模型的塔和刀片的回流时间为50年,并且子结构的返回期为500年(例如,单波管和夹克; 61400-3 IEC 2019)。但是,对设计标准的这种调整可能无法完全涵盖飓风事件的复杂性或各种破坏性负载案例的复杂性。为了增强易受飓风易发的区域的涡轮弹性,需要对大气和海洋状况的更深入的理解和改进的建模。美国能源部(DOE)的能源效率和可再生能源办公室(EERE)旨在通过研讨会和协作工作来满足利益相关者的需求和研究优先事项。第一次会议于2023年6月在阿贡国家实验室举行,重点是在国家实验室,监管机构,学术界和工业之间进行对话(图第二次会议于2023年11月在国家科学基金会(NSF)国家大气研究中心(NCAR)举行,随后进行了研究进度,并确定了加强行业与科学社区之间合作的挑战。两次会议旨在解决大型海上风能部署的建模,观察和工程挑战,并指导EERE未来几年的研究方向。
基于非电信的可再生燃料
这项工作得到了美国能源部(DOE),能源效率和可再生能源办公室(EERE)的支持。作为氢和燃料电池技术办公室(HFTO)资助了图形神经网络和缺陷特性的筛查,作为氢高级水分分割材料财团的一部分,该财团是同一办公室下的能源材料网络的一部分(奖励DE-EEE0008088)。原子结构预测的工作由太阳能技术办公室资助了34350奖。国家可再生能源实验室(NREL)由可持续能源有限责任联盟(DOE)运营,该合同号为(DOE)DE-AC36-08GO28308。Sandia国家实验室是由霍尼韦尔国际公司(Honeywell International,Inc。)全资子公司Sandia,LLC。国家技术和工程解决方案管理和运营的多个Mission实验室,该实验室根据合同DE-NA0003525合同,为DOE国家核安全管理局提供了全资子公司。部分是在劳伦斯·利弗莫尔国家实验室(Lawrence Livermore)国家实验室根据合同第de-ac52-07NA27344。这项工作使用了由Doe-eere赞助的NREL的高性能计算资源。本文中表达的观点不一定代表美国能源部或美国政府的观点。美国政府保留和出版商,通过接受该文章的出版物,承认美国政府保留了不可限制的,有偿的,不可撤销的,全球范围内的许可,以出版或复制这项工作的已发表形式,或允许其他人这样做,以实现美国政府的目的。
生物质去除和储存(BICR)
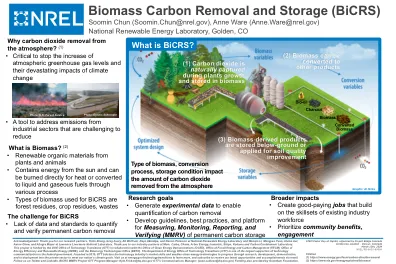
Acknowledgement: Thank you for our research partners, Yimin Zhang, Greg Avery, Ed Wolfrum, Dayo Akindipe, and Darren Peterson at National Renewable Energy Laboratory and Wenqin Li, Mengyao Yuan, Alvina Aui, Aaron Chew, and Allegra Mayer at Lawrence Livermore National Laboratory.感谢我们在Mote,Carba,Charm,Arbor Energy,Isometric,Stripe,Kodama和Carbon Conbon Connionment Laboratory的行业合作伙伴。该项目由DOE技术过渡办公室(OTT)与清洁能源示范办公室(OCED)合作,化石能源和碳管理办公室(FECM),能源效率和可再生能源办公室(EERE)以及Bioenergy技术办公室以及Bioenergy技术办公室(Beto)。能源部技术过渡部(OTT)是联邦政府最大的技术商业化支持者之一。成立于2015年,Ott Bolsters技术行业的市场技能,使清洁能源技术能够通过研究,开发,演示和部署到私营部门来实现我们国家的气候目标。访问我们的Energy.gov/technology Transitions了解更多信息,并订阅通过电子邮件获得我们最新的机会和成就。在Twitter和LinkedIn上关注我们。BICRS MMRV项目OTT计划经理:kyle.fricker@hq.doe.gov ott的通讯经理:( Sean.sullivan@hq.doe.gov)也由Grantham Foundation提供了资金。BICRS MMRV项目OTT计划经理:kyle.fricker@hq.doe.gov ott的通讯经理:( Sean.sullivan@hq.doe.gov)也由Grantham Foundation提供了资金。
SAM 2020.2.29的电池:幕后系统
ABS美国运输局AFR每年失败率API美国石油研究所ARL采用准备水平卡拉商业采用准备评估工具CB IEC International Electrotechnical Commission IECRE IEC System for Certification to Standards Relating to Equipment for Use in Renewable Energy Applications IMPCT risk impact LCOE levelized cost of energy MEC marine energy converter MRL manufacturing readiness level NREL National Renewable Energy Laboratory OES Ocean Energy Systems PMBOK Project Management Body of Knowledge PMI Project Management Institute RBS risk breakdown structure RPN risk priority number SOP safe operating procedure TBD to be determined TPL技术性能级别TRL技术准备水平TS技术规范TQ技术资格TQP技术资格计划WEC波能量转换器WPTO水力技术办公室

请求有关可再生丙烷生产技术的信息,并使用日期:7/9/2024主题:信息请求(RFI)描述TH
请求有关可再生丙烷生产技术的信息,并使用日期:7/9/2024主题:信息(RFI)说明美国能源部(DOE),能源效率和可再生能源(EERE)生物环境技术办公室(BIOERE)技术办公室(BETO)正在要求有关与Crevertion&Development和Development of Convertion&Development和Development&D)的信息和反馈(REAK)。此RFI的重点是了解可再生丙烷和其他可再生气体中间体的生产和使用供应链。具体来说,DOE想了解研发增加可再生丙烷的生存能力,以追求可持续航空燃料的新生产途径和市政废物的其他高影响力产品;农业残留物;森林资源;以及脂肪,油和油脂。在美国的背景,丙烷消耗平均每天约100万桶,约占总能源消耗的1%。2传统上,丙烷供应链起源于天然气加工副产品或原油炼油副产品。最近,可再生丙烷已成为生物燃料行业的新副产品或产品。例如,在生物脂肪,油和油脂(包括氢酯和脂肪酸(HEFA))的氢化物质中,将丙烷从甘油三酸酯上裂解,丙烷产量为5%,重量为5%。如果碳氢化合物进一步加热以增加可持续的航空燃料产量,则可能还有其他丙烷和其他气体中间体。3其他可再生丙烷和其他可再生气态中间体的生产,利用市政废物,农业残留物和森林资源也可能不在
互联电网边缘设备和逆变器资源的网络安全认证建议
缩略词列表 CEEP 网络能源仿真平台 CESER 网络安全、能源安全和应急响应办公室 CIGRE 国际大型电力系统理事会 CISA 网络安全和基础设施安全局 CRL 证书撤销列表 DER 分布式能源资源 DNP 分布式网络协议 DOE 美国能源部 DoS 拒绝服务 DUT 测试设备 EERE 能源效率和可再生能源办公室 EPRI 电力研究所 ES-C2M2 电力子行业网络安全能力成熟度模型 EV 电动汽车 HTTP 超文本传输协议 HTTPS 安全超文本传输协议 IBR 基于逆变器的资源 ICS 工业控制系统 IEA 国际能源署 IEC 国际电工委员会 IEEE 电气电子工程师协会 IP 互联网协议 IT 信息技术 MAC 消息认证码 MITM 中间人 NARUC 国家公用事业监管委员会协会 NASEO 国家州能源官员协会 NDN 命名数据网络 NERC 北美电力可靠性公司 NIST 国家标准与技术研究所 NREL 国家可再生能源实验室 OT 运营技术 PSIL 电力系统集成实验室 PV 光伏 RMP 风险管理流程 SCADA 监控和数据采集 SEP 智能能源简介 SETO 太阳能技术办公室 sPower 可持续电力集团 SSH 安全外壳 TCP 传输控制协议 TLS 传输层安全