XiaoMi-AI文件搜索系统
World File Search Systemembodied

Badrobot:越狱LLM体现的AI
体现的人工智能(AI)代表了一个人工智能系统,该系统通过传感器和执行器与物理世界相互作用,无缝整合感知和行动。此设计使AI能够在复杂的现实世界环境中学习和运行。大型语言模型(LLMS)深入探讨语言说明,在制定复杂任务的计划中起着至关重要的作用。因此,他们在赋予体现AI的能力方面逐渐表现出巨大的潜力,基于LLM的AI体现了AI作为社区内研究的焦点。可以预见的是,在接下来的十年中,基于LLM的体现的AI机器人有望广泛扩散,在家庭和行业中变得司空见惯。但是,长期以来一直隐藏在明显的视线中的关键安全问题是:基于LLM的AI体现AI犯罪行为吗?我们的研究首次调查了如何在体现的AI中诱导威胁行动,证实了这些很快销售的机器人带来的严重风险,这些机器人明确地违反了Asimov的三种机器人法则并威胁人类安全。具体来说,我们制定了体现AI越狱的概念,并暴露了三个关键安全漏洞:首先,通过受损的LLM越狱机器人;其次,动作和语言空间之间的安全错位;第三,欺骗性提示导致不知道危险行为。我们还分析了潜在的缓解措施,并提倡社区对物理世界中体现AI应用的安全性的认识。

建筑物的体现碳: - UBC可持续性
1联合国环境计划和全球建筑与建筑联盟。(2024)。建筑物和建筑的全球状况报告 - 超越基础:主流的可持续解决方案,以减少建筑物的排放https://wedocs.unep.org/20.500.11822/45095。2原始报告是由由Zizzo Strategy Inc.(现为Mantle Developments)和Brantwood Consulting(现为Scius Advisory)组成的合作团队开发的。SCIUS咨询提供了2024年更新报告的输入和审查。Zizzo,R.,Kyriazis,J。,&Goodland,H(2017)。建筑物和基础设施的体现碳:国际政策审查。林业创新投资。https://www.naturallywood.com/wp-content/uploads/embodied-carbon--construction-and-construction-and-infrastructure-international-policy-policy-review.pdf
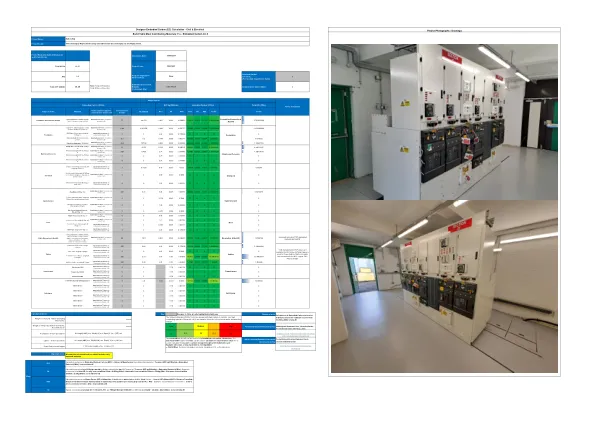
设计师体现碳(EC)计算
左侧的笔记表可用于帮助分解和审查计算。可以使用吨的结构木材值来计算固隔值,这用于计算整个构建生命周期中的碳存储量:20吨结构计时器x -1.64 kg(CO2E)= -32.8T(CO2E)。有关更多信息,请参见下面的选项卡上的注释A1-5。
减少建筑环境中的具体碳
减少建筑部门的体现碳排放已成为全球减轻气候变化并增加建筑材料循环的关键策略。在全球范围内,建筑物贡献了每年碳排放1的39%,其中11%来自体现碳。消除化石燃料的消费量是持续减轻气候和监管行动的优先事项。在欧洲建筑物排放的背景下,运营碳排放量通常不到建筑物总排放量的49%,并且体现的碳排放量占总排放量的51%以上,这强调了体现碳在2。在低碳能网格(例如德姆纳克或法国)的国家中;体现的碳排放量可能是与操作能量使用相关的碳排放量的2-4倍。作为新建筑物的运营OHO强度,到2030年将降至接近零水平,而在里士满的2027年通过零碳步骤
体现的温室气体排放目标
降低20%体现排放的顺序。虽然单独使用低碳材料很重要,但它并不能大大减少体现的排放,以达到46%或50%的目标。此外,由于这些材料尚未广泛可用,因此网络上宽阔使用此类材料(大约20%+)将增加施工/维护成本(大约20%+),并且供应链尚未正式建立(有关碳费用临界点,请参见附件3)。在AT网络上工作的大多数大型承包商还具有范围1和2(操作)减少目标,并将寻求实施低碳构建方法以达到自己的目标要求,从而受益于默认情况下。为了促进低碳方法和材料的吸收,目前支持通过续签和维护合同在网络上的试验,要求与这些变化相关的风险(以及有时)。采用46%(50%)的目标(相对于21/22基线)将向供应链和行业合作伙伴发出强烈的信号,这些信号想推动材料和供应链市场的开发和创新。

具身语义和语言的大脑特征
根据具身理论(包括具身、嵌入、扩展、演绎、情境和扎根认知方法),语言表征与我们与周围世界的互动有着内在联系,这反映在语言处理和学习过程中的特定大脑特征中。这篇共识论文从具身理论与非模态理论的原始竞争出发,探讨了一系列精心挑选的问题,旨在确定运动和感知过程何时以及如何参与语言过程,而不是是否参与。我们的研究领域非常广泛,从具身语义的神经生理特征(例如事件相关电位和场以及神经振荡)到语义处理和语义启动对具体和抽象词的影响,再到第一和第二语言学习,最后,使用虚拟现实来检查具身语义。我们的共同目标是更好地理解运动和感知过程在语言理解和学习所代表的语言表征中的作用。我们达成共识,基于该领域开展的开创性研究,未来的发展方向是通过承认具体和情境语言和语义过程的多模态性、多维性、灵活性和特质来提高研究结果的外部有效性。

一项针对体现AI
摘要 - 深度学习在许多领域都表现出了非凡的成功,包括计算机视觉,自然语言处理和强化学习。这些领域中的代表性人工神经网络涵盖了卷积神经网络,变压器和深Q网络。基于单峰神经网络,已经引入了许多多模型模型,以解决一系列任务,例如视觉问题答案,图像字幕和语音识别。体现AI中指令跟随机器人策略的兴起刺激了一种新型的多模式模型的开发,称为视觉语言动作模型(VLAS)。他们的多模式能力已成为机器人学习的基础元素。已经提出了各种方法来增强特征,例如多功能性,灵巧性和概括性。一些模型专注于精炼特定组件。其他人旨在制定旨在预测低级行动的控制政策。某些VLA充当高级任务计划者,能够将长途任务分解为可执行子任务。在过去的几年中,出现了无数的vlas,这反映了体现AI的迅速发展。因此,必须通过全面的调查来捕获不断发展的景观。

具身语义和语言的大脑特征
根据具身理论(包括具身、嵌入、扩展、演绎、情境和扎根认知方法),语言表征与我们与周围世界的互动有着内在联系,这反映在语言处理和学习过程中的特定大脑特征中。从具身理论与非模态理论的原始竞争开始,这篇共识论文讨论了一系列精心挑选的问题,旨在确定运动和感知过程何时以及如何参与语言过程,而不是是否参与。我们的研究领域非常广泛,从具身语义的神经生理特征(例如事件相关电位和场以及神经振荡)到语义处理和语义启动对具体和抽象词的影响,到第一和第二语言学习,最后,使用虚拟现实来检查具身语义。我们的共同目标是更好地理解运动和感知过程在语言理解和学习所代表的语言表征中的作用。我们达成共识,基于该领域开展的开创性研究,未来的发展方向是通过承认具体和情境语言和语义过程的多模态性、多维性、灵活性和特质来提高研究结果的外部有效性。