XiaoMi-AI文件搜索系统
World File Search Systemfpga
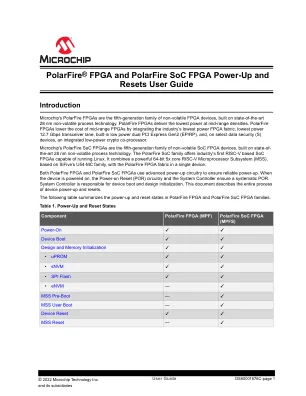
PolarFire® FPGA 和 PolarFire SoC FPGA 上电和...
注释: • 上电至功能时间基于 IO 组的 VDDI/VDDAUX 在 VDD/VDD18/VDD25 之前或之后通电的情况。IO 组启用时间从 VDD/VDD18/VDD25 的断言时间开始测量。如果 IO 组的 VDDI/VDDAUX 在 VDD/VDD18/VDD25 之后通电充足,则 IO 组启用时间从 VDDI/VDDAUX 的断言开始测量。在这种情况下,IO 操作由 BANK_#_VDDI_STATUS 的断言指示,而不是相对于 FABRIC_POR_N 否定进行测量。 • AUTOCALIB_DONE 的断言可以在 DEVICE_INIT_DONE 的断言之前或之后发生。AUTOCALIB_DONE 断言所需的时间取决于: – VDD/VDD18/VDD25 通电后 VDDI/VDDAUX 上升的时间。 – 指定用于自动校准的每个 IO 组的 VDDI 斜坡时间。 – 需要对 PCIe、SerDes 收发器和结构 LSRAM 执行多少自动初始化。 – 如果任何指定用于自动校准的 IO 组未在自动校准超时窗口内打开其 VDDI/VDDAUX,则每当 VDDI/VDDAUX 随后打开时,它都会自动校准。为了在此类 IO 组上获得准确的校准,需要启动重新校准(使用结构中的 CALIB_START)。 • 在 DEVICE_INIT_DONE 或 AUTOCALIB_DONE 断言后约 100 个系统控制器时钟周期,SUSPEND_EN 断言(如果启用了挂起模式)。 • 这两个设备系列都具有内置篡改检测功能,用于监控电压供应和标志以检测最小或最大阈值。这些标志仅在设计初始化后有效,而不是在 POR 期间有效。如果启用了系统控制器挂起模式,则必须锁存 TAMPER 标志,以便在 DEVICE_INIT_DONE 置位之后、SUSPEND_EN 置位之前,结构设计可以读取这些值。
FPGA 优化 - UTK-EECS
格雷式或顺序编码可能更快 格雷式或顺序编码可能更快。6. 对于带有黑盒的设计,使用 syn_tpd 、 syn_tco 和 syn_tso 指令准确描述时序模型。7. 确保将时序约束传递给 P&R 工具,


FPGA 问题和顾虑:真正的
业务连续性可能因多种原因而成为问题,从自然灾害到因死亡或退休而失去关键管理人员。如果敌对外国行为者收购或以其他方式控制单一来源供应商,则可能存在生存威胁,尤其是在生产在海外的情况下。就影响而言,设施搬迁通常会导致 QML 状态丧失,需要重新获得资格。新候选人可能需要长达 24 个月的时间才能通过艰巨的审批流程,然后才能获得 QML 状态以提供柱连接服务。FPGA 设备的长期停产直接影响美国国家安全,影响成千上万的下游客户,他们将无法完成系统和黑匣子构建。现在采取主动措施识别和监控风险可以减轻这种威胁。

荷兰的 FPGA 创新研究
Nikolaos Alachiotis,Twente大学,荷兰Sjoerd van den Belt,Twente大学,荷兰史蒂文·范·德·弗鲁格特(Steven van der Vlugt),荷兰射电天文学研究所(Astron) Twente,荷兰Tiziano de Matteis,Vrije Universiteit Universitiit,荷兰ZAID AL-ARS,DELFT技术大学,荷兰Roel Jordans * Baaij,Qbaylogic BV,荷兰ANA-LUCIA VARBANESCU,TWENTE大学,荷兰

RTG4™ FPGA 技术简介
Microchip 网站................................................................................................................................................21 产品变更通知服务....................................................................................................................................21 客户支持...................................................................................................................................................21 Microchip 器件代码保护功能........................................................................................................................21 法律声明......................................................................................................................................................21 商标.........................................................................................................................................................................22 质量管理体系.........................................................................................................................................................23 全球销售和服务.........................................................................................................................................................24

使用FPGA
摘要:机器人技术,自动驾驶,监视和更多字段依赖于对象检测,这是计算机视觉中的基本工作。由于其低延迟速度和并行处理功能,FPGA系统吸引了对实现对象检测算法的越来越兴趣,这很重要,因为实时处理变得越来越重要。这项工作提供了FPGA体系结构,优化和实时实现的对象检测的概要。建议的方法是选择一个适当的对象检测算法,例如著名的Yolo(您只看一次)或SSD(单镜头多伯克斯检测器),该对象以其速度和准确性比率而闻名。为了实现实时速度,该算法被映射到基于FPGA的硬件体系结构上,该架构利用其可重构性和并行性。基于FPGA的对象检测的重要组成部分是硬件体系结构的设计。优化数据途径,有效控制逻辑的构建以及将算法拆分为硬件友好型组件都是此过程的一部分。以最大程度地利用资源来实现最大化吞吐量的目标,使用了包括并行处理,循环展开和管道的技术。此外,对FPGA的优化需要调整算法和硬件设计,以充分利用目标FPGA设备的功能。减少延迟和增加的吞吐量需要优化数据传输,并行性和内存访问模式。修复错误,提高性能并添加新功能都需要定期维护和升级。使用FPGA的对象检测系统的另一个重要部分是它们与各种传感器或输入流集成的能力。获取用于实时处理的输入数据需要与各种传感器(例如相机和LIDAR设备)集成。由于它们的适应性,FPGA平台很容易被整合到各种应用程序情况下,这要归功于它们与不同传感器的接口。确保在FPGA上构建的对象检测系统是准确,快速且有弹性的,请使用常见数据集和现实世界情景进行验证和测试。为了确保系统实现目标性能指标,对实时处理要求进行了彻底评估。一旦测试,基于FPGA的对象检测系统就可以将其放置在预期的设置中,作为独立设备或较大嵌入式系统的组件。关键字: - FPGA,对象检测,计算机视觉,实时处理,硬件优化,并行处理,嵌入式系统。简介自动驾驶汽车,监视系统,机器人和更多字段依赖于对象检测,这是计算机视觉中的基本工作。在许多领域的智能决策依赖于实时检测和定位事物的能力。即使它们起作用,传统的对象检测方法也不能总是处理实时处理的强烈需求,尤其是在带有移动场景的复杂设置和众多项目中。在开发对象检测系统时,使用FPGA而不是CPU或GPU有很多好处。因此,为了加快对象检测算法并获得实时性能,在使用专用硬件平台(例如现场可编程式门阵列(FPGA))的使用方面一直在增加。首先,现场编程的门阵列(FPGA)非常适合并行化,这意味着可以有效地实现卷积神经网络(CNN)之类的对象识别技术
gatematetm fpga数据表CCGM1A1 ccgm1a2
提供的信息不能被视为保证的特征。数据可以更改而无需通知。提供的信息可以受到专利或其他权利保护。Cologne Chip产品不是在任何旨在支持或维持生命的申请中设计,打算或授权使用的,或者用于Cologne Chip产品失败可能会造成人身伤害或死亡的任何其他应用。

基于 FPGA 的脉冲宽度调制
通过控制施加到不同设备的电压,可以控制速度、热量和许多参数。控制电压的方法有很多,其中一种就是脉冲宽度调制技术。使用脉冲宽度调制可以改变占空比。脉冲宽度调制输出可以通过不同的电路获得。这里,脉冲宽度调制块有一个寄存器、计数器、比较器和 RS 锁存器。这些块是使用 QUARTUS-II 综合开发环境中的 VHDL 合成的,并在 Altera FPGA 板上进行仿真和下载。通过改变寄存器值可以改变开启时间,通过计数器值可以改变关闭时间。使用 Modelsim 软件模拟 PWM 波形输出。然后可以通过改变 FPGA 板中的 LED 强度来验证 PWM 波形。在这个项目中,使用 PWM 技术控制直流电机的速度。L293D 电机 d。将来,这种 PWM 技术可用于 MPTT 的阻抗匹配,以从太阳能电池板中提取最大功率。

SST26LF064RT 作为 FPGA 配置应用说明
Microchip 网站................................................................................................................................................28 产品变更通知服务....................................................................................................................................28 客户支持...................................................................................................................................................28 Microchip 器件代码保护功能........................................................................................................................28 法律声明......................................................................................................................................................28 商标.........................................................................................................................................................................29 质量管理体系.........................................................................................................................................................30 全球销售和服务.........................................................................................................................................................31