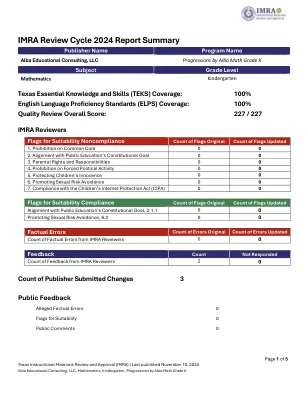
XiaoMi-AI文件搜索系统
World File Search Systemlevels
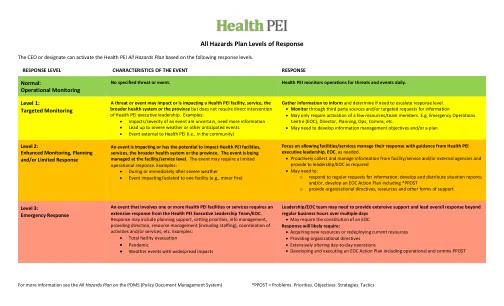
所有危害计划响应水平
涉及一个或多个健康PEI设施或服务的活动需要健康PEI执行领导团队/EOC的广泛回应。响应可能包括计划支持,设定优先级,信息管理,提供指导,资源管理(包括人员配备),活动和/或服务的协调等。示例:

施工 - 澳大利亚的TopCon激光级
对于澳大利亚的客户,TopCon强烈建议从授权的澳大利亚经销商那里购买TopCon激光器。TOPCON警告所有客户都不要期望澳大利亚经销商在澳大利亚境外购买的激光涵盖。如果在自己的国家以外购买,则没有义务在保修期内为TopCon激光提供服务。

模拟地质复杂含水层系统中国家规模的地下水动力学:exippl
Natacha B. B. Bernier A, *,Mark Hemer B,Nobuhito Mori C,Christian M. Oleksander Huizy,Jennifer L. Irish M,Kirezci N的Ebru,Nadao Kohno,Jun-Whan Lee P,Jun-Whan Lee P,Kathleen LMartha Marcos S,Reza Marsooli S,Ariadna Oliva U,Menendez Menendez,Moghimi Saeed AB,Val Swail,Tomoya C

不同噪音水平和照明水平对 Aerobots 多模态语音和视觉手势交互的影响
摘要:本文研究了不同噪声水平和不同照明水平对飞行机器人语音和手势控制命令界面的影响。目的是通过研究各个组件的局限性和使用可行性来确定语音和视觉手势多模态组合在人类有氧机器人交互中的实际适用性。为了确定这一点,分别使用 CMU(卡内基梅隆大学)sphinx 和 OpenCV(开源计算机视觉)库开发了一个自定义多模态语音和视觉手势界面。设计了一项实验研究来测量语音和手势两个主要组成部分各自的影响,并招募了 37 名参与者参与实验。环境噪声水平从 55 dB 到 85 dB 不等。环境照明水平从 10 勒克斯到 1400 勒克斯不等,在不同的照明色温混合下,黄色(3500 K)和白色(5500 K),以及用于捕捉手指手势的不同背景。实验结果包括大约 3108 个语音话语和 999 个手势质量观察,并进行了介绍和讨论。观察到语音识别准确率/成功率随着噪声水平的上升而下降,75 dB 噪声水平是航空机器人的实际应用极限,因为语音控制交互由于识别率低而变得非常不可靠。结论是,多词语音命令被认为比单词语音命令更可靠和有效。此外,由于其清晰度,一些语音命令词(例如,land)在较高噪声水平下比其他命令词(例如,hover)更耐噪。从手势照明实验的结果来看,照明条件和环境背景对手势识别质量的影响几乎微不足道,不到 0.5%。这意味着其他因素,例如手势捕获系统设计和技术(相机和计算机硬件)、捕获的手势类型(上身、全身、手、手指或面部手势)以及图像处理技术(手势分类算法),在开发成功的手势识别系统中更为重要。根据从这些发现得出的结论,提出了一些进一步的研究,包括使用替代的 ASR(自动语音识别)语音模型和开发更强大的手势识别算法。
国防部微电子:保证级别定义和...
2.1 LoA1 威胁 ...................................................................................................................................................... 11 2.2 LoA2 威胁 ...................................................................................................................................................... 13 2.3 LoA3 威胁 ...................................................................................................................................................... 15 3 实施策略 ...................................................................................................................................... 17 4 摘要 ...................................................................................................................................................... 19 附录 A:JFAC FPGA 文档概述 ............................................................................................. 20 附录 B:标准化术语 ...................................................................................................................... 22

了解自动驾驶的不同级别
根据美国汽车工程师学会 (SAE) 的定义,自动驾驶分为六个级别。这些级别从代表无自动化的 0 级到代表完全自动化的 5 级不等。每个级别都表明自动驾驶技术的发展和实施向前迈出了一步。下面是每个级别的详细说明。在 0 级,没有自动化,驾驶员完全负责控制车辆。虽然车辆可能包括前方碰撞警报或紧急制动等基本系统,但这些系统不被视为自动化,因为它们不承担任何驾驶任务。驾驶员必须执行所有功能,包括转向、制动、加速和驾驶车辆。进入 1 级,我们遇到了自动化的第一阶段,称为“驾驶辅助”。在这个级别,车辆可以协助驾驶员转向或加速和制动,但不能同时进行。例如,自适应巡航控制等功能有助于保持设定的速度,同时调整与前方车辆的距离。车道保持辅助系统还提供轻微的转向调整,以保持车辆在车道上。

欧洲空中航行安全组织数据保证级别规范
欧盟委员会条例 No 552/2004 要求制定互操作性实施规则 (IR) 以及欧洲空中交通管制组织规范,并在适用的情况下制定支持欧洲 ATM 网络互操作性的指导方针文件,其中包括航空数据质量 (ADQ)。欧洲空中交通管制组织监管和咨询框架 (ERAF) 定义了制定监管材料时要使用的流程和模板。欧洲空中交通管制组织规范模板已应用于数据保证级别规范 (DAL 规范) 的制定。DAL 规范作为欧洲空中交通管制组织规范编写,主要是为了满足委员会条例 (EU) No 73/2010 的要求,以满足航空数据处理的数据质量要求,从起源到航空信息服务提供商 (AISP) 向下一位预期用户发布。其内容被视为一种可能的合规手段,是在充分考虑了符合性评估 (CA) 指南以支持实现相关规定的情况下制定的。数据完整性级别在 ICAO 附件中定义,并在欧洲数据质量要求规范协调清单中记录和扩展。DAL 规范为每个数据完整性级别定义了数据质量保证目标,并解决了委员会条例 (EU) No 73/2010 中的具体规定。对于按照委员会条例 (EU) No 73/2010 实施和运营的所有各方和利益相关者来说,这是一份重要文件。本规范作为一份单独的文档制定,但应结合其他相关文件和欧洲空中导航安全组织规范阅读,例如数据质量要求规范和数据来源规范。DAL 规范的主要目的是解决委员会条例 (EU) No 73/2010 第 6(2) 条和附件 IV B 部分中的要求。但是,该规范还涵盖了第 4 至第 10 条和第 13 条,并为它们提供了补充目标,但仅限于解决与这些规定相关的数据质量问题所必需的范围。本文进一步讨论了这样做的理由。委员会条例 (EU) No 73/2010 的以下条款不包含在内:成分的一致性或适用性(第 11 条)、系统验证(第 12 条)、过渡性规定(第 14 条)和生效和适用(第 15 条)。对于已经参与航空数据提供并获得有效 ISO 9001:2008 认证的各方而言,其 QMS 和数据流程很可能已经符合许多 DAL 规范要求。认识到这一点,DAL 规范将一组目标归类为与 ISO 9001:2008 标准中的条款相关,并在专用附件(附件 J)中单独列出这些目标。

OISC 2 级和 3 级考试资源手册
o 这些变化意味着,根据附录 EU 授予的预定居身份只有在该人离开英国连续五年以上(或如果授予瑞士国民或瑞士国民的家庭成员则为四年)的情况下才会失效。以前,该规定仅适用于具有定居身份的人。• 判例法 - 增加了 Advic、Al Hassan、Chowdhury、LA 和 Ishtiaq 的案件。删除一些过时的欧盟判例 • 添加《1998 年人权法》的一些章节 • 在《1999 年移民和庇护法》中增加第 98 条 • 在《庇护和移民(索赔人的待遇等)》中增加第 35 条2004 年法案 • 增加一级法庭移民和庇护分庭的新实践指示(1/04/24)并进行相应的删除 • 更新《2015 年移民(健康收费)令》以反映当前的收费和豁免金额 • 更新《2020 年移民(公民权利上诉)(欧盟退出)条例》以反映《2023 年移民(公民权利上诉)(欧盟退出)(修正案)条例》 • 删除第 12 条,国籍和2022 年边境法 • 删除附录香港英国国民(海外)和附录 AR(欧盟) • 添加附录家庭暴力受害者 • 在移民规则第 6 段的解释部分添加一些额外的单词和短语 • 更新英联邦国家名单 • 修订附录访客:签证国家名单——将哥伦比亚添加到名单中 - (变更声明 HC334 26/11/24)
产品和工艺设计中的操作层次
级别 1 — 操作标准化。操作标准化的目的是减少生产不同部件所需的操作数量。这也会减少所需的工具数量和设备数量。每台机器的操作类型减少会减少单台机器的设置时间,从而最大限度地提高运行时间与空闲时间的比率。为了促进标准化组件和操作的任务,工程师应使用标准组件并系统地查阅机械加工手册,这些手册是工程选择的参考[11]。设置时间分析。减少设置时间对于解决严重影响生产过程灵活性的问题至关重要。应用 Shingo 的 SMED(单分钟模具更换[12])方法,丰田得以将压力机的设置时间从几个小时缩短到几分钟。较短的设置时间是实现有效重复制造流程的必要条件,也是实现 2 级和 3 级目标的主要因素之一。装卸时间分析。减少装卸时间(在自动化工厂中指码垛和卸垛时间),旨在最大限度地提高运行时间与装卸时间之间的比率。减少这些时间的措施与工件几何形状、所用夹具和自动装卸设备有关。柔性制造系统 (FMS) 的装卸时间减少可减少操作员数量,并影响托盘传送带的尺寸。更一般地说,旨在减少通用机床上装卸时间的操作(通过使用自动装载机实现)不得导致设置时间增加,否则会降低机器的灵活性。防错装置。防错装置,字面意思是万无一失的装置,旨在避免人为错误,从而提高工作质量和安全性。在混合型号生产线中可以找到许多防错装置的应用示例,其中交替使用不同的型号可能会导致频繁的装配错误。