XiaoMi-AI文件搜索系统
World File Search Systemloop
无电容 LDO 的快速循环
半导体行业集成电路和电源管理的发展迫使电子电路能够更高程度地集成到片上系统解决方案中。传统的低压差稳压器具有较大的外部电容器来补偿频率响应和瞬态变化。为了集成到片上系统应用中,必须移除外部电容器。对于 28nm CMOS 工艺技术,所提出的解决方案提供了一种快速调节路径,无需外部电容器即可补偿低压差稳压器的瞬态响应。该低压差稳压器无需外部电容,具有快速调节路径,供电电压为 1.8V,能够调节 1.2V、1.1V、1V、0.9V、0.8V 和 0.7V 的输出电压。从无外部电容的低压差稳压器的通用无补偿架构来看,在误差放大器中实现了一个值为 5pF 的内部米勒电容,目的是在系统中产生频率补偿并确保其交流稳定性。研究并实施了一种快速调节路径补偿方案,用于补偿负载电容相当于 1 pF 时最大负载电流变化为 1 mA 的瞬态响应。仿真结果表明,低压差稳压器在最先进的架构中具有竞争力,超越了一些架构,输出电压的正负瞬态变化值分别记录为 48 mV 和 49.8 mV,恢复时间为 0.5 µ s。随后进行的 PVT(工艺、电压、温度)极端情况模拟和蒙特卡罗分析表明,所设计的系统符合 ISO 26262 标准。提出了所提系统的布局设计,以供将来集成。
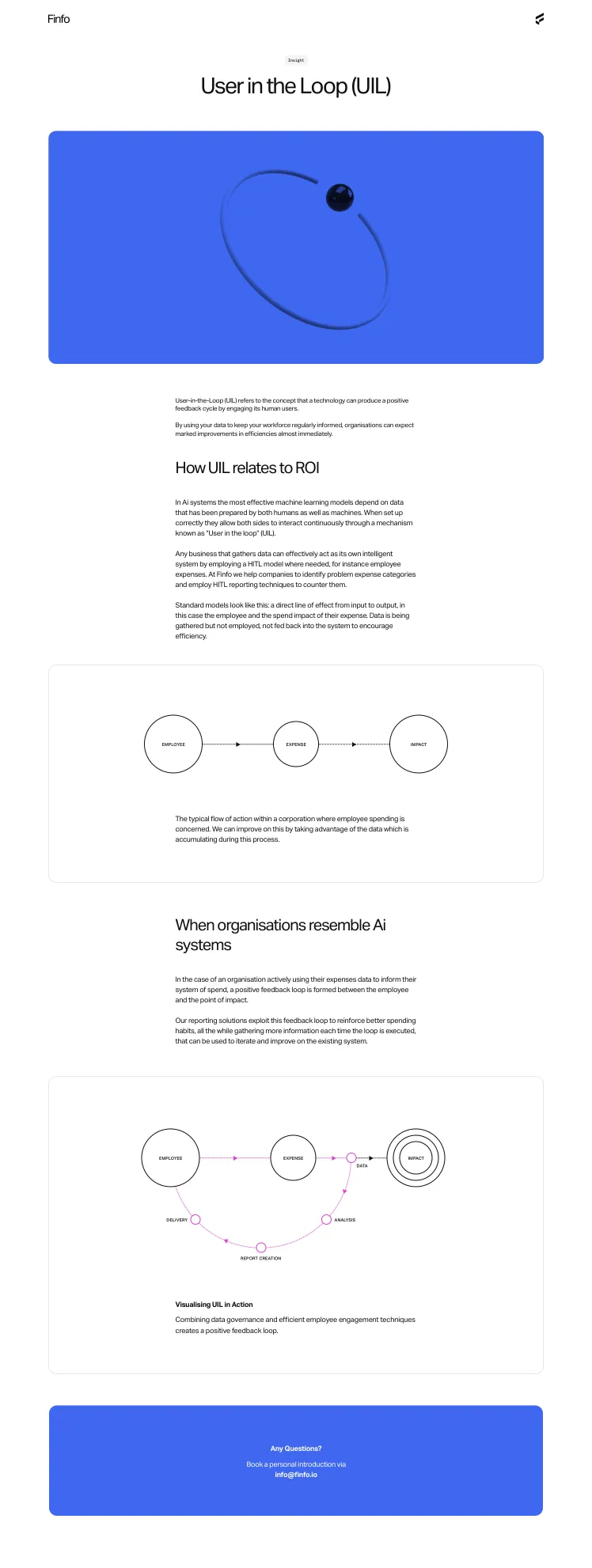
循环(UIL)中的用户-Finfo
在AI系统中,最有效的机器学习模型取决于人类和机器都制备的数据。正确设置时,它们允许双方通过称为“循环中的用户”(UIL)的机制连续相互作用。任何收集数据的业务都可以通过在需要的情况下(例如员工费用)在需要的情况下采用hitl模型来效力充当其自己的智能系统。在Finfo,我们帮助公司确定问题费用类别并采用HITL报告技术来对抗它们。标准模型看起来像这样:从输入到输出的直接线路,在这种情况下,员工的费用和费用的支出影响。数据正在收集但未使用,而不是回到系统中以鼓励效率。

圈量子引力的回顾
物理学中最为成熟的两个理论框架是广义相对论和量子场论。广义相对论认为,与刚性背景相反,时空本身是一个动态实体,它与存在于其中的物质相互作用。另一方面,量子场论声称,我们与之相互作用的所有基本粒子实际上都是场的量化激发。这两种理论都经受住了实验的考验,精度令人难以置信;然而,它们都存在概念问题,这表明还有我们尚未发现的更深层次的理论。广义相对论在模拟从苹果掉落到宇宙膨胀等现象方面非常成功,但它也预测了自身的失败:时空奇点不可避免地由恒星坍缩形成,此时曲率变为无限大。另一方面,量子场论受到无限性的困扰更为严重。许多表达式仅以形式表达式的形式存在,尽管可以通过重正化方案消除一些分歧,但我们仍然对量子场论作为自然基本描述的真正有效性产生了质疑。除此之外,尽管广义相对论和量子场论是两种经过最精确测试的理论,但它们是由不相容的数学框架构建的,因此不可能同时成立。还有其他更微妙的问题,例如黑洞信息悖论,它促使我们重新审视我们目前可用的理论。

渗透性和滞后循环测量...
渗透性和矫正性是评估软磁性材料的最重要参数。最柔软的磁性材料的标准要求非常高的渗透性和 /或极低的可矫正性,这些特性需要各向异性能量,磁弹性能趋于零。当对纳米晶材料的粉状类型的纳米晶体材料进行热处理时,这些独特的需求就会满足。为了将微结构特征与合金的软磁性和在不同温度下退火的环形样品的最初渗透性相关联,在室温下使用10 -3 OE的AC场测量。磁性磁滞是永久磁性材料的有用属性,我们希望在其中存储大型亚稳态磁化。另一方面,大量的应用需要每个周期的小磁滞损失。这些包括电感器,低频和高频变压器,交替的电流机器,电动机,发电机和磁性放大器的应用。目前的论文着重于测量其无定形和纳米晶体状态的样品的渗透率和磁滞回路。关键字:渗透性,胁迫,磁弹性,finemet,纳米晶,磁滞等。

BCDIABETES内部安装循环
在2020-AUG-1 BCDAIBETES开始支持开源(DIY)人工胰腺系统的内部装置(AID,也称为“自动胰岛素输送”辅助工具),并使用无管的Omnipod Dash-Dash-Dash-DASH-DASH-DEXCOM G6和iPhone&Android AID算法。这是带有手机运行Androidaps的设置的图片。尽管不是加拿大卫生批准的,但BCDIABETES认为当前版本的LOOP(Master Branch)是最佳入门级开源援助,可用于大多数具有良好家庭支持的成年人和儿童。Loop是一种保守算法,我们估计迄今为止,我们对全球35,000多名个人和1320 BCDiabetes客户的估计已安装。在BCDIABETES上,其各种口味中的环比零售辅助工具更优选,因为BC Pharmacare对Omnipod System&Dexcom G6/7的大多数给定覆盖范围更负担得起,并且仅部分覆盖零售援助组件。

人类参与 - 奖学金@范德堡大学法学院
Bernstein、Charleton Copeland、Dan Deacon、Rebecca Eisenberg、Michael Froomkin、Jim Gibson、Patrick Gudridge、Kristian Hammond、Corinna Lain、Matt Sag、Andres Sawicki、Alex Stremitzer、Charlotte Tschider 和 Christopher Yoo。感谢 Luca Baltensberger、Rabea Benhalim、Ana Bracic、Christopher Corts、Sue Glueck、Claudia Haupt、Fiona Illi、Izzy Longstaff、Andrea Matwyshyn、Emily McReynolds、Aileen Neilson、Paul Ohm、Nadav Orien-Peer、Gabriel Rauterberg、Blake Reid、Nikkita Rivera、Andrew Selbst、Lawrence Solum、Sloan Speck、Elizabeth Stalfort 和 Harry Surden 提供的有益评论和对话。本文受益于 AALS 2020 年会、苏黎世联邦理工学院和苏黎世大学与圣加仑大学创新法律与经济学研讨会、人工智能法律学者圆桌会议、西北大学、宾夕法尼亚大学和斯坦福大学法学院法律与 STEM 青年教师论坛、隐私法学者会议、里士满法学院教师研讨会、迈阿密大学法学院法律理论研讨会、密歇根大学法学院治理研讨会、密歇根大学人工智能与法律研讨会、Techlaw 青年学者研讨会和 We Robot 会议的慷慨反馈。我们感谢 Nathan Fuller、Abbi Lynch、Phoebe Roque、Rylee Snively 和 Angela Theodoropoulos 提供的出色研究协助。Nicholson Price 的工作得到了 Novo Nordisk 基金会 (拨款编号 NNF17SA0027784) 的支持。代表我们每个人:所有错误都是我的合著者的。

闭环 - JALLC - 北约
JALLC 的 BG Mîndrescu 跟随 LTG Yakovleff 介绍了最近完成的 JALLC 项目:来自 ISAF 的战略经验教训。该报告试图确定军事战略层面上 ISAF 的经验教训可以为未来北约领导的行动做出贡献的领域。他解释了分析过程中采用的方法,以及如何通过确定 ISAF 定期任务审查 (PMR) 作为主要数据来源来满足该项目的分析要求,这些数据将提供发展理解所需的信息,并最终提供有用的结论和建议。该项目的分析共得出 643 项对北约具有战略意义的基于证据的观察结果。项目团队收集的观察结果经过分析并分为战略类别(准确地说是 11 个):国家影响力;培训;保护平民;资金;信息和经验教训共享;综合方法;指挥统一;战略司令部; C2;安全部队援助 (SFA);向坚定支持任务 (RSM) 过渡。然后将 11 个战略主题分为政治军事经济、社会、基础设施和信息 (PMESII) 构造的六个领域中的五个(不包括基础设施)。
斯洛伐克共和国的闭环
“无休止的食物和材料浪费正在耗尽地球资源。循环经济路线图将使斯洛伐克共和国能够给二次原材料第二次机会。我们消耗的自然资源超过了地球所能提供的资源。我们过度生产废物,我们的消费不断增长。斯洛伐克经济是线性的——我们大多使用材料并将其扔进垃圾填埋场,而不是回收利用。尽管如此,我们也在废物管理领域做出了许多积极改变。我们对可生物降解的城市垃圾进行分类,我们使用押金退款计划,并停止使用一次性塑料。改变整体经济模式并非易事,但我相信经合组织的建议将有助于我们向循环经济转型。”