XiaoMi-AI文件搜索系统
World File Search Systemmanipulator

计算空间中机器人操纵器的离线直接教学
本文提出了一种使用增强和虚拟现实技术的机器人教学方法。机器人教学对于机器人完成工业生产的几项任务至关重要。尽管有各种方法可以执行机器人操纵的运动计划,但仍需要机器人教学才能进行精确和可靠性。在线教学,其中物理机器人在真实空间中移动以获得所需的运动,并且由于其易于性和可靠性而被广泛执行。但是,需要实际的机器人移动。相比之下,可以在计算空间中完全实现局部教学,并且需要将机器人的周围构造为计算机图形模型。此外,planar显示器不提供3D场景上的精通信息。我们提出的方法可以作为频道教学的使用,但是操作员可以使用头部安装的设备和虚拟3D空间中的指定控制器来直观地操纵机器人。我们通过增强和虚拟现实技术展示了机器人教学的两种方法,并显示了一些实验结果。

搭载空中机械手的六旋翼飞行器的导航控制与稳定性研究
摘要 本文使用牛顿-欧拉法建立了配备机械臂的六旋翼飞行器的动力学模型,并研究了其稳定性。为了模拟干扰,使用了简化的摆锤法。这种六旋翼飞行器配置以前从未在科学论文中涉及过。所得模型是一个非线性、耦合和欠驱动的动力学模型,其中包括由于六旋翼飞行器配备机械臂而产生的空气动力学效应和干扰。本文的目的是全面研究使用简化摆锤法确定六旋翼飞行器的惯性矩,同时考虑到质量分布和重心变化的影响,这是六旋翼飞行器在空中运动期间机械手连续运动的结果。实验测试是使用 Solid Works 应用程序进行的,并使用 LabVIEW 进行评估,以便全面了解插入到动力学模型中的干扰。整个飞行器模型由四个经典的 PID 控制器驱动,用于控制飞行器的姿态和空间中所需轨迹的高度。这些控制器用于很好地理解如何评估和验证模型,使其成为抗干扰模型,此外,它们还易于设计和快速响应,但它们需要开发才能获得最佳结果。将来,将定义精确的轨迹,
使用机器对机器技术的平行操纵器开发人造视力
摘要:本研究着重于为灵活的Delta机器人机器人制定人工视觉系统,并将其与机器到机器(M2M)通信集成在一起,以优化实时设备的交互。这种集成旨在提高机器人系统的速度并提高其整体性能。在有限的空间中,人工视觉系统与M2M通信的拟议组合可以检测和识别具有高度准确性的目标,以定位,进一步定位以及进行制造过程,例如组装或零件的分类。在这项研究中,RGB图像用作Mask -R -CNN算法的输入数据,并且根据Delta Robot ARM原型的特征对结果进行处理。从Mask -R -CNN获得的数据适用于Delta机器人控制系统中,并提出了其独特的特征和定位要求。M2M技术使机器人组能够快速反应变化,例如移动对象或其位置变化,这对于分类和包装任务至关重要。该系统在接近实际的条件下进行了测试,以评估其性能和可靠性。

使用UR3E操纵器
近年来,随着机器人技术的发展,医疗保健行业一直在取得显着进步[1],[2]。由于Covid-19引起的大流行,使用机器人技术的医疗程序的自动化变得至关重要[3],[4]。机器人正在逐步用于包括手术[5],康复[6],诊断[7]和药物输送[8]在内的广泛任务[8],提供精度,效率和远程操作能力[9]。现代机器人技术具有使用机器人操纵器[10]进行医学检查程序的巨大潜力[10],这些机器人使用各种末端效应子在特定任务中提供其他功能。如今,机器人臂成为医学研究小组的主要重点[11]。 机器人操纵器具有轻巧的重新配置手臂设计,高精度执行器和运动控制系统。 这些机器人用于需要高度精确和质量的任务性能的医学场景,例如组织缝合[12],微创手术[13],[14]和超声检查[15]。如今,机器人臂成为医学研究小组的主要重点[11]。机器人操纵器具有轻巧的重新配置手臂设计,高精度执行器和运动控制系统。这些机器人用于需要高度精确和质量的任务性能的医学场景,例如组织缝合[12],微创手术[13],[14]和超声检查[15]。

在复杂森林环境中探索的球形空中操纵器机器人
从无人机中受益匪浅的重要研究领域是精确农业,因为它们具有出色的空间分解能力,因此非常适合对蔬菜斑块进行详细的小规模分析。据我们所知,很少有研究应用无人机来探索诸如果园之类的复杂森林环境,通常依靠间接的甲基化来获取作物信息。在这项工作中,我们提出了一种新的方法,可以使特征的测量(例如分别测量水果或茎/叶)进行评估,以评估其成熟度或检测作物疾病。为了实现这一目标,我们引入了一种名为“ Sambot:球形空中ma-nipulator机器人”的新设计,该设计由一个由球形结构保护的迷你UAV组成,其前部有一个固定的操纵器。sambot与机械手的访问空间的能力相结合的球形脱落的保护益处。拟议的设计与ROS2兼容,ROS2是机器人研究和工业应用中广泛使用的框架。我们提议的范围的潜在应用范围范围超出了精确农业的范围,这些地区范围内,诸如矿山或崩溃的建筑物,结构检查以及自主地下导航等地区的搜索和救援区域。

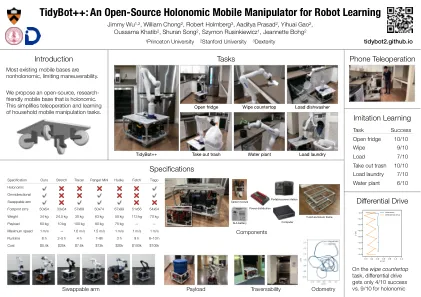
使用商品移动操纵器
拉动开放式橱柜和抽屉在感知中提出了许多困难的技术挑战(从车载传感器中推断物体的发电参数),计划(制定符合紧密任务约束的运动计划)和控制(在环境上施加力时进行控制和维护接触))。在这项工作中,我们构建了一个端到端系统,该系统使商品机械手操纵器(Stretch Re2)能够在以前看不见的现实世界环境中拉出开放式橱柜和抽屉。我们对该系统进行了4天的现实世界测试,这些系统涵盖了来自13个不同现实世界环境的31种不同对象。我们的系统在未看到的环境中开放新颖的机柜和抽屉的成功率为61%。对故障模式的分析表明,感知错误是我们系统最重大的挑战。我们将开放源代码和模型,供其他人复制并在我们的系统上构建。

使用CAD和GUI
摘要 - 行业中的操纵者日益普及的人增加了对操纵器的运动学和动态知识的掌握的需求。另一方面,操纵器是为了学习目的而不是负担得起的物品,因此建模是正确的解决方案之一,也是一种新的贡献形式来引入物理操纵器,而无需在实验室中进行许多操纵器。通过这项工作,可以将4度(DOF)操纵器的4度操纵器的物理建模与其原始形式作为教育机器人类似,并且可以设计仪表板来控制其运动。使用Autodesk Inventor开发了操纵器的机械物理模型,并且使用图形用户界面(GUI)MATLAB进行操作参数的设置。使用的操纵器模型是Dobot Magician,它具有四个Revolute关节。使用Autodesk Inventor设计工具进行建模的优势是直观的用户界面,易于理解和无学生许可,因此,它比学生(例如在现有研究中)对学生更友好。作为一种学习媒体,这种建模非常复杂,可以学习机械设计,在SIMSCAPE多机上使用XML(可扩展的标记语言)扩展转换为MATLAB,在SIMSCAPE上设置了运动学和动力学,并在MATLAB上使用GUI设计控制界面。这项工作通过基于前向运动学和反向运动学方法的GUI设定的路径计划方法证明了机器人运动的准确性。

强化学习控制可重构平面电缆驱动的平行操纵器*
摘要 - 由于电缆的固有灵活性和弹性,电缆驱动的并行机器人(CDPR)通常对模型和动态控制具有挑战性。将在线几何可重新配置性的附加包含在CDPR上导致具有高度非线性动力学的复杂不确定的系统。必要的(数值)冗余分辨率需要多个优化的层,以使其对实时控制的应用程序计算效率过高。在这里,深厚的强化学习方法可以提供一个无模型的框架来克服这些挑战,并可以提供实时的动态控制。本研究讨论了动态轨迹跟踪中无模型DRL实现的三个设置:(i)具有固定工作空间的标准非冗余CDPR; (ii)在可重构CDPR上具有冗余分辨率的端到端设置中; (iii)在一种脱钩的方法中,分别解决运动学和驱动裁员。

使用软执行器网络对软水下操纵器的基于学习的外观
摘要 - 与环境对象的互动可以引起外部感受和本体感受信号的重大变化。然而,水下软操作器中外部感受传感器的部署遇到了许多挑战和约束,从而对其感知能力施加了限制。在本文中,我们提出了一种基于学习的新型表达方法,该方法利用内部本体感受信号并利用软执行器网络(SAN)的原理。def> div>趋势倾向于通过水下软操作器中的sans传播,并且可以通过本体感受传感器检测到。我们从传感器信号中提取特征,并开发完全连接的神经网(FCNN)基于分类器以确定碰撞位置。我们已经构建了一个培训数据集和一个独立的验证数据集,目的是培训和验证分类器。使用独立的验证数据集以97.11%的精度识别出碰撞位置的实验结果,该碰撞位置在水下软机器人的感知和控制范围内表现出潜在的应用。