XiaoMi-AI文件搜索系统
World File Search Systemmotor
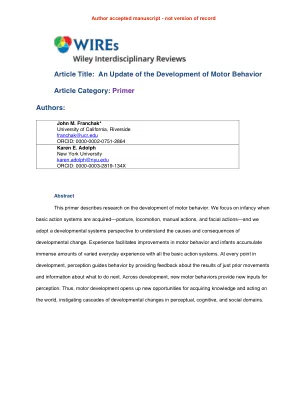
运动行为发展的更新。
图1。在四个动作系统中从A到Z的运动开发 - 稳定,运动,手动动作和面部动作。末端的所有动作都嵌套在姿势中,包括:仰卧(a),俯卧(b),三脚架坐着(c),独立坐姿(d)和站立(e)。姿势之间的过渡(f,g)使婴儿可以自由选择如何瞬间移动。婴儿在学会走路之前使用创意手段,例如原木滚动(h),腹部爬行(i),搭便车(J),手和knees爬行(K),bum-shuffling(L)和膝盖步行(M)。直立步行(n)与所有动作一样,通过练习进行了完善。与俯卧(O)或仰卧(a)相比,坐着(p)为达到和手动探索提供了稳定的支持基础。婴儿可以完善其从手掌(Q)到指尖握把(R)的物体的能力,并学会握住具有越来越实用的握把的工具(S,T,U)。面部动作涉及协调饮食(v),微笑(W)和发声(x)的动作。婴儿的外观和视觉探索周围环境的能力取决于眼睛和头部嵌套在体内的运动,这意味着,坐着(y)婴儿可以看到越来越高的人,而易于(z)。在NIH婴儿工具箱(A-O,Q-U,X,Y)和Kelsey West(P,V,W,W,Z)的许可下重印。
YZ450F(V) - 雅马哈发动机
1.本机器仅供经验丰富的驾驶者操作。在您完全熟悉机器特性之前,请勿尝试以最大功率操作机器。2.本机器仅供操作员驾驶。请勿在本机器上载客。3.务必穿戴防护服。操作本机器时,务必佩戴经批准的头盔、护目镜或面罩。还要穿上厚靴子、手套和防护服。始终穿着合适的衣服,以免被机器的任何运动部件或控制装置夹住。4.始终保持机器正常工作。为了安全和可靠,必须正确维护机器。始终执行本手册中指示的操作前检查。骑行前纠正机械问题可能会防止事故发生。5.汽油极易燃烧。加油时务必关闭发动机。注意不要将汽油溅到发动机或排气系统上。切勿在明火附近或吸烟时加油。
机动车注册手册
处理和处理(P&H)费用。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.1-3排除。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>.1-3 P&H费用和续签通知。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>.1-3注册转移。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。1-4存款给州公路基金。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 1-4邮件或电子注册服务费。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。1-4存款给州公路基金。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。1-4邮件或电子注册服务费。。。。。。。。。。。。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>1-4费用处置。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>1-4县的额外费用。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。1-5息账户的费用存款。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。1-5费用利息。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>1-5使用县注册费。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。1-6州和县之间的费用分配。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。1-6资金的电子传输。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。1-6税务评估者收费赔偿金。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。县之间的1-6个合同。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>1-7费用分配。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>1-7 1,2通过支票,信用卡或借记卡不足的资金。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。。。。。。。。。。。。1-7
科罗拉多州机动车手册
未保险/保险不足的驾驶者覆盖范围。没有保险/保险不足的驾驶者(UM/ UIM)在科罗拉多州是可选的。此承保范围为被保险人的身体伤害损失造成了撞车司机,没有汽车保险的驾驶员或保险人不足的车辆的驾驶员。UM/UIM承保范围代替了另一个驾驶员应该购买的保险,或者在保险后驾驶员的车辆时保护被保险人,但其保单的身体伤害责任限制少于被保险人的UM/UIM覆盖范围的限制。此覆盖范围不能保护其他驾驶员,也不能涵盖被保险人车辆的损坏。根据现行法律,该州的所有保险公司都必须提供与保单持有人当前的人身伤害责任范围相同的金额,除非保单持有人以书面形式放弃此保险。进行这种拒绝的保单持有人可以选择较低的承保范围或完全拒绝承保范围。

小儿神经康复的运动图像
显然,MI的总干预长度与MI的总干预措施与共同康复计划耦合。治疗从2天延长到6个月,在3项研究中尚不清楚持续时间(Hemayattalab和Movahedi,2010; Scott等,2019,2020)。基于MI任务的康复练习是从1到24个会议进行的。mi任务是在常规和更常见的临时任务之间进行区分的。常规任务,主要是由分级运动图像(GMI)程序的原理驱动的,仅在几种情况下详细介绍,主要由分级MI干预,Radial Fitts任务和手部旋转任务组成。临时任务实质上介入了按需操作的MI练习,建模(对AO的心理模拟与主动观察没有明确关系)和MI + AO(明确拼写了AO任务)。数字工具用于6项研究,在大脑计算机界面的保护下,虚拟现实,App neck Back™(Taherian等,2017; Tubic,2018; Ebrahimisani等,2020; Lu等,2020; 2020; Marshall et al。,2020; Stefano Filho Filho et al。在一些研究中,未指出MI任务。通过不同的工具,包括运动评估电池,心理计时测试,量表和MI和神经发育障碍,EEG和EMG的调查表,量表和问卷调查,获得了MI的测量。以随访的不同时间间隔评估临床结果。在21/22的原始文章中报道了物理/运动和认知参数变化的评估,除一项研究外,只有摘要可用(GözaçanKarabulut等人,2022年)。考虑到MI的有效性在每个发育障碍/病情上都不同,因此MI的使用在19/22中有效,而在残留研究效果中尚不确定(表1)。
机动车标题手册
规则;表格。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-1处理应用程序;规则。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>2-1客户查询。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>2-1发布信息。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div>2-1发布信息。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-2的被监禁个人的要求。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 2-2车辆记录(历史记录)。 。 。 。 。 。 。 。 。 。 。 。 。2-2的被监禁个人的要求。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-2车辆记录(历史记录)。 。 。 。 。 。 。 。 。 。 。 。 。2-2车辆记录(历史记录)。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-2 2.2县行政部门。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-3

维也纳电动机研讨会-2024
注册费包括入学,展览,网络平台,研讨会文件,招待会和展览开幕式,“市长接待”,周四和周五的午餐,休息期间的咖啡以及研讨会结束时到机场的公交车。我们将立即确认收到在线注册,但这不是参加研讨会的授权。确认注册(包括发票)或其他信息将在几天内遵循。电动机研讨会计划为3天面对面的活动。

基于 BCI 的振动触觉神经反馈训练可改善运动想象过程中的运动皮层兴奋性
在本研究中,我们探讨了振动触觉反馈是否可以增强运动皮层兴奋性,从而转化为基于运动想象 (MI) BCI 的训练期间局部皮层区域的可塑性变化。为此,我们重点研究了 MI 的两个最显着的神经生理学效应——事件相关去同步 (ERD) 水平和通过导航经颅磁刺激 (nTMS) 评估的皮层兴奋性增加。对于 TMS 导航,我们使用了单独的高分辨率 3D 脑 MRI。十名未接受过 BCI 治疗的健康成年人参加了这项研究。在有和没有反馈的情况下分别执行 MI(使用 Graz-BCI 范式的静息或左/右手想象)任务。为了研究基于 MI BCI 的训练中振动触觉反馈的存在/不存在对感觉运动皮层激活的贡献程度,我们比较了有反馈和无反馈训练后 MI 期间的 MEP 幅度。此外,还研究了基于 MI BCI 的训练期间的 ERD 水平。我们的研究结果证明,在 MI 训练期间应用振动触觉反馈会导致 (i) 与非惯用手的 MI 相对应的对侧运动皮层区域的 mu 节律 EEG 模式的去同步水平增强;(ii) 与 MI 所涉及的肌肉相对应的手部肌肉表征中的运动皮层兴奋性增加。

基于 BCI 的振动触觉神经反馈训练可改善运动想象过程中的运动皮层兴奋性
摘要—在本研究中,我们探讨了振动触觉反馈是否可以增强运动皮层兴奋性,从而在基于运动想象 (MI) BCI 的训练过程中转化为局部皮层区域的可塑性变化。为此,我们重点研究了 MI 的两个最显着的神经生理学效应——事件相关去同步 (ERD) 水平和通过导航经颅磁刺激 (nTMS) 评估的皮层兴奋性增加。对于 TMS 导航,我们使用了单独的高分辨率 3D 脑 MRI。十名未接受过 BCI 治疗的健康成年人参加了本研究。在有和没有反馈的情况下分别执行 MI(使用 Graz-BCI 范式的休息或左/右手想象)任务。为了调查基于 MI BCI 的训练中振动触觉反馈的存在/不存在对运动皮层兴奋性的贡献程度