XiaoMi-AI文件搜索系统
World File Search Systemmounted

壁挂式恒星POWERTM光学系统
flw-16L-40-27K7 1584 75 21 FLW-1-16L-40-27K8 1484 71 21 FLW-1-16L-40-30K8-40-30K8 1591 76 21 21 FLW-16L-40-40-30K7 21 FLW-1-16L-40-40K7 1851 88 21 FLW-1-16L-40-50K8 1713 1713 82 21 FLW-1-16L-40-50K7 1851 88 21 FLW-1-16L-53-30K7 FLW-1-16L-7-30K7 3024 84 36 FLW-1-16L-7-40K7 3132 87 36 FLW-1-16L-7-7-50K7 3240 90 36 FLW-16L-1-30K7 4704 4704 84 54 56 FLW-16L-1-16L-1-40K7 4872 87 4872 87 56 FLW-16L-56 FLW-16L-56 FLW-16L-56 FLW-16L FLW-1-32L-35-30K7 2772 84 33 FLW-1-32L-35-40K7 2871 87 33 FLW-1-32L-35-50K7 2970 90 33 FLW-1-32L-53-32L-53-30K7 FLW-1-32L-53-50K7 4860 90 54 FLW-1-32L-7-32L-7-30K7 5964 84 71 FLW-1-32L-7-7-40K7 6177 6177 87 71 FLW-1-32L-7-7-7-7-50K7
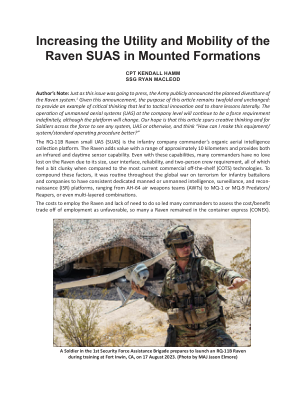
提高 Raven SUAS 在骑兵编队中的实用性和机动性
RQ-11B 大渡鸦小型无人机 (SUAS) 是步兵连指挥官的有机空中情报收集平台。大渡鸦的射程约为 10 公里,并具有红外和日间传感器功能,这为其增添了价值。即使具备这些功能,许多指挥官仍然对大渡鸦不感兴趣,因为它的尺寸、用户界面、可靠性以及对两人机组人员的要求,与最新的商用现货 (COTS) 技术相比,所有这些要求都有些笨重。除了这些因素之外,在整个全球反恐战争期间,步兵营和连队都经常拥有专用的有人或无人情报、监视和侦察 (ISR) 平台,从 AH-64 空中武器小组 (AWT) 到 MQ-1 或 MQ-9 捕食者/收割者,甚至是多层组合。


Mozobil(plerixafor)C9017-A
该Molina临床政策(MCP)旨在促进利用管理过程。政策不是治疗的补充或建议;提供者完全负责该成员的诊断,治疗和临床建议。它表达了莫利纳(Molina)确定某些服务或供应是为了确定付款适当性的目的,在医学上是必要的,实验性,研究或化妆品。在医学上有必要的特定服务或供应的结论不构成涵盖该服务或供应的代表或保证(例如,将由Molina支付)特定成员。成员的福利计划确定覆盖范围 - 每个福利计划定义了涵盖哪些服务,哪些被排除在外,哪些受到美元上限或其他限制。成员及其提供者将需要咨询成员的福利计划,以确定是否存在适用于本服务或供应的任何排除或其他福利限制。如果该政策与成员的福利计划之间存在差异,则福利计划将管理。此外,可以根据州,联邦政府或医疗保险成员的适用法律要求要求承保范围。CMS的覆盖范围数据库可在CMS网站上找到。覆盖范围指令和现有国家承保范围确定(NCD)或地方覆盖范围确定(LCD)的标准将取代本MCP内容,并为所有Medicare成员提供指令。在政策批准和出版时所包含的参考文献是准确的。

使用表面安装的薄膜石墨烯传感器的方法
该角色通常由电池管理系统(BMS)提供,该系统利用简单的电流,电压和脾气测量值来监视SOC和SOH在包装或模块级别上。流行的EV模型利用细胞组织为由中央BMS控制的模块。例如,特斯拉模型S包含7140×18 650个细胞(在16个平行和6个串联细胞的16个模块中),2个和2个串联电池,以及BMS MONI-MONI-MONI-MONI-MONI-MONI-MONI-MON-MONI-MON-MON-TOUCTION电池电压和温度,并防止过电压。3日产叶包含一个30 kW h电池组,该电池组由192个小袋单元组成,该小袋单元在8细胞模块,4和通过开路电压(OCV)和电荷计数(CC)方法组成。5此模块化BMS设计的可用数据范围有限,因此显示的范围值充其量是一个粗略的估计值。此外,模块级方法意味着它无法响应单个单元失败

头戴式间接视觉的目标检测性能
参与者使用头盔显示器 (HMD) 和触摸屏显示器通过 3 种不同的方法检测目标,以显示间接视觉显示系统的 360º 视频。使用受试者内设计,目标包括下马、骑乘和空中目标。测量了检测到的目标数量、工作量和每种条件的可用性。与监视器条件相比,HMD 条件在总体上和每种类型的目标类型中检测到的目标明显更多。根据 NASA TLX 的测量,与其他条件相比,HMD 的使用还产生了明显较低的心理工作量,并且实现了明显更高的可用性。讨论了这些差异的可能原因,并讨论了未来使用 HMD 和混合现实技术进行间接视觉显示系统的研究。
头戴式间接视觉的目标检测性能
参与者使用头盔显示器 (HMD) 和触摸屏显示器通过 3 种不同的方法检测目标,以显示间接视觉显示系统的 360º 视频。采用受试者内设计,目标包括下马、骑乘和空中目标。测量了检测到的目标数量、工作量和每种条件下的可用性。与监视器条件相比,HMD 条件在总体上和每种目标类型中检测到的目标数量明显更多。与其他条件相比,使用 HMD 还产生了明显较低的心理工作量(由 NASA TLX 测量),并且实现了明显更高的可用性。讨论了这些差异的可能原因,并讨论了未来使用 HMD 和混合现实技术进行间接视觉显示系统的研究。


Scroll Tank Mounted 2021 数字文件.cdr - 开山澳大利亚
kaishan.com.au › uploads › 2021/11 PDF 2021年11月30日 — 2021年11月30日提高可靠性并提供安全工作...涡旋空气压缩机通过...数字控制提供能源效率

使用机器学习和
近年来,在人工智能和四轮驱动无人机开发领域已完成了许多工作。神经网络和人工智能培训由于其在人类生活中的几乎无限的应用而引起了研究人员的极大兴趣。一个主要目标是通过促进人与计算机之间的自然交流方法使人们每天处理的机器更容易访问。此外,在过去的几十年中,商业和消费级无人机以及光探测和范围(LIDAR)技术已经大大发展。今天,空中机器人在环境扫描,娱乐和军事行动等地区发现了许多用途。该小组希望将这两种令人印象深刻的技术结合在一起。使用机器学习和激光雷达技术来创建可以检测一组给定目标的四轮驱动器。无人机具有使用传感器飞行和检测几个不同对象的功能。我们的无人机具有四轮驱动器的标准设计,该项目的焦点是用于其视觉和感官分析的机器学习软件。第二个主要重点是