XiaoMi-AI文件搜索系统
World File Search Systemnodes

OpenShift容器平台4.14与基于代理的安装程序
控制平面主机之一在启动过程开始时运行辅助服务,并最终成为引导程序主机。此节点称为Rendezvous主机(节点0)。辅助服务确保所有主机都满足要求并触发OpenShift容器平台群集部署。所有节点都具有写入磁盘的Red Hat Enterprise Linux CoreOS(RHCOS)图像。非引导节点重新启动并启动集群部署。重新启动节点后,会合主机重新启动并加入群集。引导程序已完成,并且部署了群集。
使用新型混合聚合物-脂质纳米颗粒佐剂增强 HBsAg-VLP 疫苗的体液和细胞免疫
将小鼠分组(n=4),在右后腿肌肉注射HBsAg、HBsAg/Al或HBsAg/HPLNP(w/w=1/600)制剂,剂量为1 µg HBsAg/只小鼠。肌肉注射后,在12、24、48和72小时通过体内成像系统FX Pro(Kodak)采集注射部位的荧光图。在不同时间点获得各组小鼠注射部位的平均荧光强度图。肌肉注射后,在12、24、48和72小时采集肠系膜淋巴结的荧光信号。计算不同组别的注射部位和肠系膜淋巴结的平均荧光强度,以比较各种疫苗制剂在抗原储存效应和淋巴结引流方面的效果。2.9 淋巴结中淋巴细胞的激活

复杂系统的量子通信容量跃迁...
量子网络是实现分布式量子信息处理的关键。由于单链路通信速率随距离呈指数衰减,为了实现可靠的端到端量子通信,节点数量需要随网络规模增长。对于高度连接的网络,我们发现容量会随着网络节点密度的增加而出现阈值转变——在临界密度以下,速率几乎为零,而在阈值以上,速率随密度线性增加。令人惊讶的是,在阈值以上,由于量子网络支持多路径路由,两个节点之间的典型通信容量与它们之间的距离无关。相比之下,对于连接较少的网络(例如无标度网络),端到端容量会随着节点数量的增加而饱和为常数,并且始终随距离衰减。我们的结果基于容量评估,因此可观容量的最小密度要求适用于任何量子网络的一般协议。
约束满足问题 (CSP)
– 为每个变量创建一个节点。所有可能的域值最初都分配给变量 – 如果存在二元约束,则在节点之间绘制边。否则,在约束涉及两个以上变量的节点之间绘制超边 • 约束传播:
空间机器人如何受益于世界标准......
EtherCAT 支持任何拓扑,而不会影响性能,也不存在级联交换机或集线器所带来的复杂性:线型、树型和星型拓扑可以自由组合。每个网段最多可以有 65,535 个节点。一个主站可以托管多个网段。EtherCAT 主站可以使用拓扑识别功能自动检测网络变化,该功能将实际网络与主站预期的配置进行比较,并据此重新配置。因此,节点可以在运行期间连接和断开。动态适应网络识别允许在运行期间连接和断开网络段或单个节点,例如当机器人操纵器抓取并连接到特定的基于 EtherCAT 的传感器工具时。EtherCAT 从站控制器是此热连接功能的基础。EtherCAT 会自动为从站节点分配地址,因此无需手动寻址。这高度支持不断变化的机器人操纵器配置,其中机器人必须扩展其内部数据网络以包括外部抓取负载和/或传感器。地址可以保留,这样如果添加更多节点,就不需要新的寻址,因为在启动时地址会自动分配。

全球货物运输需要高度移动的网络
私有 Rajant 网状网络提供其他宽带和网状网络产品无法比拟的移动性、性能、可靠性、安全性、可扩展性和灵活性。我们的自修复点对点网络通过互连的 BreadCrumb® 无线节点网络和我们获得专利的¹ InstaMesh 网络软件提供连接。所有网络节点和客户端都可以随时在网络内的任何位置移动。由于每个 BreadCrumb 都可以有多个连接,因此始终存在一条可行的路径来传递您的信息。事实上,您添加的节点越多,您建立的通信路径就越多,您的网络就越有弹性。

flone:完全洛伦兹网络嵌入以推断新颖2
图1。DDT网络中层次结构的插图。以DTINET 116中的药物节点DB00050为例,它可以直接与两个靶点节点P30968和P22888结合,它也可以通过110个基于药物疾病的疾病节点和118
非霍奇金淋巴瘤(NHL)
淋巴系统构成免疫系统的一部分,该系统可以保护我们的身体免受疾病和感染。在整个淋巴系统中都发现了称为淋巴结(或淋巴腺)的小豆类器官的簇。淋巴结(充满淋巴细胞)在通过它们时清洁淋巴液。细菌,病毒和其他有害物质被清除并破坏。当您感染(例如喉咙痛)时,您可能会注意到,下颌下的淋巴结会肿胀和嫩。这是因为淋巴细胞因引起感染的病毒或细菌而被激活并繁殖。
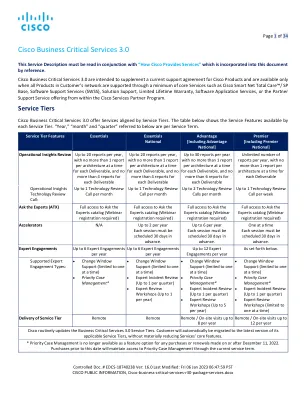
思科关键业务服务 3.0
• 设计构建器报告通过创建设计策略和设计模式的全面、详细端到端映射,为客户提供网络设备、功能和关系的可视化表示,以帮助发现弱点并简化网络可支持性。一 (1) 份设计构建器报告提供审计结果和与设计相匹配的发现节点、相邻节点、缺失节点和链接的概述,以及通过检查前十 (10) 项策略和最多五十 (50) 台客户设备(所有设备仅运行以下软件之一)提出的建议:Cisco IOS 软件、Cisco IOS XE 软件、Cisco XR 软件、Cisco Nexus OS 软件。