XiaoMi-AI文件搜索系统
World File Search Systemrpm

新闻资料包
技术规格 构造:双座 / 并排 / 三轮起落架 长度:7.26 米 (23,82 英尺) 翼展:8.78 米 (28,80 英尺) 高度:2.23 米 (7,31 英尺) 最大起飞重量 (MTOW):1 005 千克 (2 216 磅) 安全:全套救援降落伞、防爆燃油箱 发动机:莱康明 IO-360-M1A (180 马力 @ 2 700 rpm) - INTEGRAL S - VFR 和 IFR 发动机:莱康明 AEIO-360-M1A (180 马力 @ 2 700 rpm) - INTEGRAL S - 特技飞行 螺旋桨:恒速 载荷系数:+6 / -4 G (@960 千克 / Cat A2) 载荷系数:+5 / -3 G (@1005 kg / Cat BC) 航程:926 公里 (500 海里) 燃油容量:159 升 (42 加仑) 行李:30 公斤
Giga 425 EXY / Gigamax 425 EXY - 吉朗五十铃
发动机:五十铃 SiTEC 425 五十铃 6WG1-TC 6 缸,24 气门,直列,顶置凸轮轴,直喷,4 冲程,柴油。涡轮增压和空对空中冷。冷却废气再循环系统。带内置限速器的电子调速器和带恢复功能的巡航控制。缸径和行程:147 x 154 mm 排量:15,681 cc 压缩比:15.5:1 功率:316 kW @ 1,800 rpm(ISO 1585 NET) 扭矩:2,059 Nm @ 1,100 rpm(ISO 1585 NET) 排放标准:ADR 80/00(欧 III) 进气系统 • 唐纳森干式滤芯,15” 两级空气过滤器。垂直进气管,带纤薄侧面进气口。排气系统 • 垂直消声器,右侧带亮色穿孔隔热板。• 空气控制,蝶形排气制动器(2,200 rpm 时减速高达 350 hp)。排气制动怠速切断开关。燃油系统 • Denso 共轨燃油喷射系统。直列式燃油滤清器和水沉淀器。• 油箱:1 x 450 L Hilton 铝制圆柱形(LHS),带两个全长油箱安装台阶。润滑系统 • 压力供给润滑系统。油容量 31.0 L(包括过滤器)。
2024年5月的策略更新
•标题更改以反映从“远程患者监控”到“远程生理监测”的杂语变化,因为这是该技术更广泛接受的词。•在整个政策中将杂语从“远程患者监控”更改为“远程生理监测”,因为这是该技术更广泛接受的词。•在政策中添加了“自我测量的血压(SMBP)”,因为SMBP监视具有自己的代码集,并被指定为单独的技术。•通过删除RPM下的标准声明以进行FDA批准,扩大覆盖范围,因为审查的FDA清除设备的列表未能实现。•通过添加“孤立的高血压”为例,阐明任何其他指示的RPM的非覆盖范围,因为我们看到了很多对此的请求。•在未覆盖的RTM语句中将杂语从“全”变为“任何”指示,表明与标准使用的语言一致。
333 P-Tier紧凑型轨道加载器
发动机333 P-Tier / 333 P-Tier SmartGrade™制造商和型号Yanmar 4TNV94FHT位移3.1 L(186.3 Cu。< / div>in。)非道路排放标准EPA最终第4 / EU级IV级额定发动机速度2,500 rpm缸4扭矩4扭矩上升39%,在1,700 rpm总额定额定功率(ISO 14396)80.9 kW(108.5 hp),2,500 rpm peeper,Is InterCohared peeper j1 peeper(108.5 hp) 78.9 kW(105.8 hp)在2,500 rpm空气清洁剂干燥双元峰值扭矩394 nm(290.6 ft.-lb.)在1,700 rpm冷却风扇型可变速度液压驱动标准/反向风扇驱动器驱动器可选动力总成泵轴向轴向活塞静液压旅行速度(续)控制电气2速2速度,高13.7 km/h(8.5 mph),弹性速度,弹性速度,2.9 km 5.9km。刹车底盘橡胶轨道轨道轨道带有可选的400毫米(15.8英寸)轨道36.3 kPa(5.3 psi)轨道宽度轨道辊(每侧)5三平滑骑行全钢标准标准450毫米(17.7英寸)滚筒可选400毫米(15.8英寸)轨道怠速(每侧)2双范围平滑乘坐全钢接地压力辊,标准450毫米(17.7英寸)具有标准450毫米(17.7英寸)的操作权重轨道5531千克(12,183磅)轨道32.8 kPa(4.8 psi)拖流努力5221 kgf(11,500 lbf)液压泵流量流液压马力流量(计算)标准95 l/m(25 gpm)标准38 kW(51.1 hp),高流量的总压167 L/m(44 gpm)高速公路(44 gpm)高度67 kpm c.44 kpm c。 132 kPa (3,500 psi) Cylinders Type John Deere heat-treated, chrome-plated, polished cylinder rods, hardened steel (replaceable bushings) pivot pins Electrical Voltage 12 volt Lights Halogen: 2 front and 1 rear standard / Battery Capacity 950 CCA deluxe LED: 4 front and 1 rear optional Alternator Rating 120 amp Serviceability Operator's Station Refill Capacity ROPS (ISO 3471) / fops(ISO 3449)结构,具有快速居式标准燃油箱136.3 L(36 gal。)< / div。

建模和ANN优化
摘要:这项工作研究了纤维素纤维增强的生物复合材料的钻孔性能。钻孔以三个主轴速度进行,并使用三个不同的钻头以三个饲料速度进行:HSS-TITAN,HSS-Carbide和HSS-Super。根据使用自由软件图像确定的分层因子评估了钻孔性能。结果表明,该因子的值随着主轴速度的增加而降低,并且随进料速率的增加而增加。另一方面,HSS-Super Drill造成的分层比其他两个钻头少。为了预测分层值,使用了人工神经网络(ANN)方法。使用HSS-SUPER钻(2200 rpm)和40 mm/rev的进料速率时,获得了最佳孔质量。最坏的情况是使用HSS碳化物钻时带来的,主轴速度为500 rpm,进料速率为120 mm/ rev。
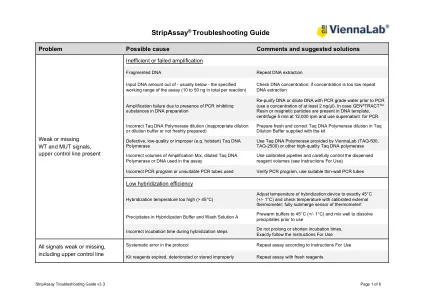
StraceAssay®故障排除指南
在PCR之前用PCR级水重复DNA或稀释DNA(使用至少2 ng/µl的浓度)。如果Gen X Tract™树脂或磁性颗粒存在于DNA模板中,则在12,000 rpm处离心5分钟,然后将上清液用于PCR。

基于机器的驾驶决策策略(DDS)...
1,2,3 CSE部,CMR技术校园,印度Telangana 4 4,CMR技术校园CSE助理教授,印度Telangana,印度Telangana,摘要:正在进行的独立车辆的驾驶方法,而不是完全由外部变量(徒步,街头条件的人,等等)无视车辆内部的状况。 本研究提出了“根据自动驾驶汽车的ML驾驶决策策略(DDS)”,它考虑了外部和内部车辆组件(可消耗环境,RPM水平等),以决定独立车辆的最佳方法。 DDS通过使用车辆的云挡管传感器信息来决定独立车辆的最佳驾驶技术。 为了确保DDS的准确性,本文针对MLP和RF神经网络模型进行了测试。 DDS在测试过程中确定了RPM,速度,控制点和路径的变化比MLP高40%,比RF高22%。 此外,其事故率比当前车辆入口低约5%。 关键字 - 自动驾驶汽车,机器学习和驾驶策略。1,2,3 CSE部,CMR技术校园,印度Telangana 4 4,CMR技术校园CSE助理教授,印度Telangana,印度Telangana,摘要:正在进行的独立车辆的驾驶方法,而不是完全由外部变量(徒步,街头条件的人,等等)无视车辆内部的状况。本研究提出了“根据自动驾驶汽车的ML驾驶决策策略(DDS)”,它考虑了外部和内部车辆组件(可消耗环境,RPM水平等),以决定独立车辆的最佳方法。DDS通过使用车辆的云挡管传感器信息来决定独立车辆的最佳驾驶技术。为了确保DDS的准确性,本文针对MLP和RF神经网络模型进行了测试。DDS在测试过程中确定了RPM,速度,控制点和路径的变化比MLP高40%,比RF高22%。此外,其事故率比当前车辆入口低约5%。关键字 - 自动驾驶汽车,机器学习和驾驶策略。
MLX驱动程序Doca-主机安装和升级
doca-host为某些特定内核提供了内核模块的二进制构建。此脚本重建了Doca-host包含的定制内核版本中包含的内核模块,并创建了一个RPM或DEB软件包,该软件包可容纳所有这些重建模块,以便于安装。

WürthElektronik EMC实验室
- 24n28p配置,KV 25,KT 0.4 nm/a - 直径69毫米 * 22.3毫米厚度 - 额定值350 rpm→允许使用齿轮的使用情况 - 额定电压,电流和扭矩:24 V,1.43 A,0.6 nm,0.6 nm
VAMS概述第三方员工健康
•使用VAM履行共证的疫苗管理职责的好处•VAMS过程流程以及用户在系统中的互动方式•VAM中的不同用户门户•诊所管理员的角色和责任和VAM中的诊所员工的角色和责任•在RPM ehr中,将疫苗作为疫苗进入RPM EHR的历史数据范围•基础•ACT ACT和ACT ACT ACT ACT ACT和ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT ACT行为,