XiaoMi-AI文件搜索系统
World File Search Systemtile

luxfelt™垫子瓷砖 - 遗产地毯
提升。介绍Luxfelt。为性能和舒适而创建了一个新的Bentley地毯背衬系统。通过最大程度地减少磨损,将面部纤维的外观延长高达50%,从而在地毯瓷砖选择中添加Luxfelt可提高纹理外观保留等级(TARR)结果。实际上,空间的整个体验都被卢克斯特(Luxfelt)提高了 - 吸收声音,冬季的环境温度提高,用户疲劳减轻以及脚下的舒适度更高。

1260 瓷砖烧结纸质隔离片
挑战 一家位于印度的领先瓷砖制造商希望提高高铝陶瓷瓷砖的生产率和质量。重点领域是在烧结过程中使用更有效的隔离解决方案。目前,作为生砖之间的隔离材料,气泡氧化铝粉末是手动撒布的,然后将瓷砖堆放、装载并在隧道窑中烧制。然而,由于气泡氧化铝粉末在烧制后的瓷砖上“粘性”,需要物理力量来分离瓷砖,这可能会导致裂缝(图 1)。然后手动抛光瓷砖以去除所有粉末痕迹,这非常耗时(图 2)。与摩根在材料和解决方案方面合作,客户希望实现以下目标: • 减少隔离材料烧制前准备和烧制后去除的工时 • 减少瓷砖破裂和表面污染的缺陷 • 提高生产率和产量
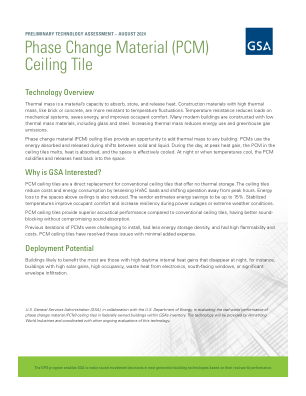
相变材料 (PCM) 天花板砖
热质量是材料吸收、储存和释放热量的能力。砖或混凝土等热质量高的建筑材料更能抵抗温度波动。耐高温可减少机械系统的负荷、节省能源并提高居住者的舒适度。许多现代建筑都是用低热质量材料建造的,包括玻璃和钢材。增加热质量可减少能源使用和温室气体排放。


单元化程序瓦片,m3,每件 3 件用于装甲......
H. 使用任何捆扎带时,必须进行 [ARE] 操作以确保捆扎带接头下侧的末端至少超出密封件 6 英寸,捆扎带需要额外的最小长度,以便随后收紧松动的捆扎带。通过使用送料轮张紧工具(手动或气动)并应用一个额外的密封件,无需更换捆扎带或拼接捆扎带即可完成重新张紧。

大理石粉和瓷砖粉作为混凝土胶凝材料的应用
摘要 — 人们广泛研究了农业和工业废料作为建筑业原材料的使用。这些产品价格低廉,有助于环境可持续性,因为这样可以减少环境污染。本研究重点研究了新鲜、物理和硬化混凝土的性能,这些混凝土中混合了大理石 (MP) 和瓷砖粉 (TP) 的几种比例,例如 0%、5% (2.5%MP + 2.5%TP)、10% (5%MP + 5%TP)、15% (7.5%MP + 7.5%TP) 和 20% (10%MP + 10%TP) 按重量计算。共浇铸了 60 个混凝土圆柱体,水灰比为 0.45,混合比为 1:1.96:2.14,并养护 7 天和 28 天。这些圆柱体用于检查混凝土的抗压强度和劈裂抗拉强度。试验结果表明:2.5%MP+2.5%TP试样28 d后抗压强度和劈裂抗拉强度分别提高了8.90%和8.30%。

将重分散聚合物粉末添加到水泥瓷砖粘合剂中的效果:文献综述
结构和建筑材料的现代进步促使研究人员专注于这些创新的适应。尤其是,由于陶瓷瓷砖在各种室内和室外设置中的美学吸引力以及安装简单性,引起了人们的关注。陶瓷瓷砖的利用不仅旨在提供结构完整性,而且类似地旨在增强其视觉属性,从而具有重要的价值。在将这些瓷砖固定在表面上的角度上,常规方法需要使用沙子泥浆灌浆。尽管如此,这种方法提出了某些局限性,例如保留水分不足,刚性表面,延长的干燥期,缺乏柔韧性和较厚的糊剂施用以及其他问题。可以通过与其他水泥元素结合结合掺入可重分散的聚合物粉(RPP)来有效解决这些障碍。通过它们的合并应用,聚合物与水泥成分协同增强物理和机械特征,从而提高粘附强度,最大程度地减少收缩并减少吸水。本评论文章的主要目标是强调陶瓷瓷砖粘合剂的重要性,同时提供了胶合瓷砖粘合剂(CTA)及其所有组件的彻底解释。我们将重点放在市售的RPP及其纳入CTA配方上。

覆盖层 2024
2021 年 9 月 1 日,Roca Tile 成为 LAMOSA 集团的一部分,该集团由 Bernardo Elosua 和 Viviano Valdes 于 1890 年在墨西哥工业摇篮蒙特雷创立。130 年后,Lamosa 已成为世界上最大的瓷砖制造商之一,在 6 个不同的国家拥有 20 家瓷砖生产厂,年产量超过 2 亿平方米。这一切都归功于现在的 9,000 名员工,他们成功地将公司带到了现在的地位,遵循公司不断创新和不断改进产品的动力,以及以服务、技术和可持续创新为基础的公司文化。通过收购 Roca Tile,Lamosa 集团继续作为行业先驱前进,希望超越客户期望并保持领先于市场趋势。
RMS 补丁:0407 2023 年 5 月 18 日
问题陈述:当待处理政府收据图块和待处理承包商确认图块中的传输带有日期戳并使用用户计算机上的“Tab”键时,传输不会移动到审查中的传输或已完成的传输图块。修复描述:当在政府模式下待处理政府收据图块中的“收到日期”列中输入日期并使用“Tab”键移出该字段时,传输将移动到审查中的传输部分。当在承包商模式下待处理承包商确认图块中的“承包商收到”列中输入日期并使用“Tab”键移出该字段时,传输将移动到已完成的传输图块。修复前:当在 GM 中待处理政府收据图块中的“收到日期”列中输入日期并使用“Tab”键移出该字段时,除非是最后一个传输,否则传输不会移动到审核中的传输图块中。