XiaoMi-AI文件搜索系统
World File Search System交互系统
体验性心理负荷、可用性感知、二者的相互作用及其对任务绩效的影响
过去在 HCI 领域的研究已经产生了许多评估交互系统可用性的程序。在这些程序中,人们倾向于忽略用户的特征、上下文的各个方面以及任务的特殊性。建立一个包含这些特征的凝聚模型并不是一件容易的事情。在人为因素中,一个被大量引用的概念是人类的心理负荷。对它的评估是预测人类表现的基础。尽管可用性和心理负荷有多种用途,但对它们之间的关系的探索却不多。这项实证研究的重点是 I)对这种关系的研究和 II)对这两个概念对人类表现的影响的研究。进行了一项用户研究,参与者在三个流行的网站上执行一组信息搜索任务。对可用性和心理负荷进行了深入的相关性分析,分析了任务、用户和客观任务表现类别 (I)。基于不同的学习策略,采用了多种监督机器学习技术来构建模型,旨在预测任务表现类别 (II)。研究结果有力地表明,可用性和心理工作量是两个不重叠的结构,它们可以联合使用来大大提高对人类表现的预测。

使用OpenCV和介质管进行实时交互的基于手势的鼠标控制系统
技术,Karnataka 2 BE Scholar,CSE,部门,Shri Dharmasthala Manjunatheshwara技术学院,卡纳塔克邦摘要 - 该研究提出了一种基于手势的交互系统,旨在使用OpenCV和MediaPipe实时控制。此系统使用手势来提供一种直观且不接触的方式来与计算机进行交互,从而为与传统输入设备(如鼠标或键盘等传统输入设备)挣扎的人相互访问。使用单个网络摄像头,该系统连续捕获并监视手动移动。这些运动是通过模式识别算法处理的,以准确识别特定的手势,每个手势都与各种计算机操作相对应,包括鼠标运动,咔嗒声和滚动。该系统是针对用户友好性和效率进行设计的,使用户可以在无人接触的情况下轻松浏览其计算机屏幕。研究的结果强调了使用手势来实现基本计算机控制任务的实用性和有效性,在日常和专业计算方案中提出了一种有希望的无提交互方法。索引术语 - 手势识别,OpenCV,MediaPipe,小鼠控制,人类计算机相互作用。

TELKOMNIKA 电信计算电子和控制
在人机交互中,传感器对于保证实时应用中的稳定性和高性能至关重要。尽管如此,机器人的精确便携式传感器通常成本高昂,而且使用免费软件处理信号的灵活性很低。因此,我们提出了一种可穿戴传感器网络来测量人机交互系统中的下肢角位置。实现该目标的方法包括使用低成本设备实现无线网络、验证设计要求以及通过概念验证进行验证。设计网络的要求包括低信息丢失、实时通信和传感器融合,以使用陀螺仪和加速度计估计角位置。因此,开发的传感器网络具有基于 ESP8266 微控制器的客户端-服务器架构。此外,该网络使用标准 802.11 b/g/n 来传输角速度和加速度测量值。此外,我们实现了用户数据报协议 (UDP) 协议,以 10 毫秒的采样时间实时运行。最后,我们实施了概念验证以显示系统的有效性。因此,我们使用卡尔曼滤波器来估计脚、小腿、大腿和臀部的角度位置。结果表明,实施的传感器网络适用于实时机器人应用。

团队学习作为设计人机共同创造系统的镜头
生成式、机器学习驱动的交互系统有可能改变人们在创造过程中与计算机交互的方式——将工具变成共同创造者。然而,我们仍然不清楚如何在开放式任务领域实现有效的人机协作。在与机器学习驱动系统的交互中,存在一些已知的沟通挑战。在共同创造系统的设计中,一个被忽视的方面是如何更好地支持用户学习与此类系统协作。在这里,我们将人机协作重新定义为一个学习问题:受团队学习研究的启发,我们假设适用于人机团队的类似学习策略也可能提高与共同创造生成系统合作的人类的协作效率和质量。在本立场文件中,我们旨在促进团队学习,将其作为设计更有效的共同创造人机协作的视角,并强调协作过程质量是共同创造系统的目标。此外,我们概述了在共同创造人工智能系统中嵌入团队学习支持的初步示意图框架。最后,我们提出了一项研究议程,并提出了开放性问题,以供进一步研究,以支持人们学习与生成人工智能系统合作。

汽车和军事航空环境中的视线控制投影显示
现代汽车信息娱乐系统通过在主要驾驶任务中添加次要任务来促进驾驶。这些次要任务很有可能分散驾驶员对主要驾驶任务的注意力,从而降低安全性或增加认知工作量。同样,军用飞机(包括快速喷气式飞机和运输机)的飞行员除了主要飞行任务外,还需要执行大量的次要任务控制任务,在某些情况下,例如在地面攻击例行程序中,任务控制次要任务变得比自动驾驶飞行任务更为重要。因此,在汽车和航空环境中,简化操作员与电子用户界面之间的人机交互 (HMI) 可以潜在地提高安全性并有助于充分利用这些系统的真正潜力。本文提出了一种新的交互系统,该系统将现有的头向下式显示器投射到操作员(汽车环境中的驾驶员和航空环境中的飞行员)挡风玻璃前的半透明板上。投影屏幕允许以指向和选择的形式进行交互,就像传统的图形用户界面一样,但是会跟踪操作员的视线或手指运动。最终的系统旨在减少操作员需要将视线从驾驶或飞行的主要任务上移开的次数,并且他们只需通过查看或移动食指即可与投影显示进行交互。我们有

多模态数据融合在增强人机交互中的应用...
摘要 — 人机交互已经存在了几十年,每天都有新的应用出现。尚待实现的主要目标之一是设计一种类似于人与人之间交互的交互。因此,需要开发能够复制更真实、更轻松的人机交互的交互系统。另一方面,开发人员和研究人员需要了解用于实现这一目标的尖端技术。这些系统可以与人工智能相结合,以做出准确的行动或决策。运动跟踪器、虚拟现实耳机等系统都利用人工智能来减少误差幅度,并从设备中获得最佳输出。拥有一个不仅能够接受用户输入而且能够理解这些数据的系统将人机交互提升到一个新的水平。我们提出这项调查是为了向研究人员提供使用多种输入实现的最先进的数据融合技术,以完成工业 4.0 应用中使用的机器人应用领域的任务。此外,输入数据模式大致分为单模态和多模态系统,它们应用于包括医疗保健行业在内的众多行业,有助于医疗行业的未来发展。它将帮助专业人员使用不同的模式检查患者。多模态系统通过所使用的输入组合来区分

集成系统和机电工程 – 基于模型的接口管理如何支持多领域协作
1. 简介 未来几年,航空航天和国防 (A&D) 行业将特别受到气候变化、能源价格、经济和技术等因素的影响,进一步推动客户对减少产品开发时间和成本的需求,而网络中心互操作性等新业务需求则导致相互依赖的系统之系统 (SoS) [Jamshidi 2009]。SoS 通过组合多个交互系统来提供所需的功能,但代价是增加复杂性和不确定性,这直接反映在相应的开发过程中 [Browning 1998]。为了在可容忍的时间范围内设计出像军用飞机这样的复杂 SoS,不同学科特定的开发过程已经并行化,每个流程都相当独立地管理。但这种并行工程 (CE) 范式与跨学科飞机设计的迭代性质相冲突,需要有效的跨域信息交换。因此,这些特点对同步的多域协作提出了重要挑战,而传统的领域分离的工程流程和异构工具环境无法充分提供这种挑战 [Broy et al. 2010] 因此,未来的集成开发流程必须重点关注。日常业务经验表明,特别是在系统工程和机械/电气工程领域特定交付物的集成过程中,这两个流程

练习和经验,ISSN 1895-1767,http://www.scpe ...
摘要。为了提高智能语音互动机器人的准确性,作者提出了一种基于深度学习的研究意图识别方法。通过介绍GloveBibgru自己的注意分类预测模型,构建了意图识别功能模块,并采用ROS分布式体系结构来整合系统功能模块,从而实现了人与机器之间的智能语音交互。模拟结果表明,使用该方法的语音意图识别具有更高的精度。与基于DCNN模型,CNN-LSTM模型和GRU自我注意力模型的意图识别方法相比,识别精度高于8。02%,4。06%和2。分别为13%,并且在特征提取方面具有更好的识别效果,与基于Bilstm模型的传统提取方法相比,BigRU的训练时间缩短了四倍,从而导致了较高的训练能力。根据实验发现,使用建议的意图识别方法开发了语音交互系统,在理解用户英语语音命令方面保持了高度的准确性和效率。平均准确率为89.72%,识别时间始终低于0.35秒,很明显,该方法适用于现实世界中的语音相互作用。基于手套的意图识别方法可以将注意力用于智能语音机器人中的英语语音互动。
MEDALS AMPS 访问帮助.pdf - 国防后勤局
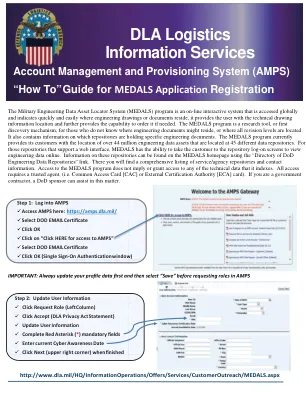
军事工程数据资产定位系统 (MEDALS) 程序是一个在线交互系统,可在全球范围内访问,并可快速轻松地指示工程图纸或文档所在的位置,它为用户提供技术图纸信息位置,并进一步提供在需要时订购它的功能。对于那些不知道工程文档可能位于何处或所有修订级别位于何处的人来说,MEDALS 程序是一种研究工具或首次发现机制。它还包含有关哪些存储库保存特定工程文档的信息。MEDALS 程序目前为其客户提供位于 45 个不同数据存储库中的超过 4400 万个工程数据资产的位置。对于那些支持 Web 界面的存储库,MEDALS 能够将客户带到存储库登录屏幕以在线查看工程数据。可以使用“国防部工程数据存储库目录”链接在 MEDALS 主页上找到有关这些存储库的信息。在那里,您将找到服务/机构存储库和联系信息的综合列表。访问 MEDALS 程序并不意味着或授予对其索引的任何技术数据的访问权限。所有访问都需要可信代理(即通用访问卡 [CAC] 或外部认证机构 [ECA] 卡)。如果您是政府承包商,国防部赞助商可以协助处理此事。
CS-25 修正案 25 - EASA
目录(总体布局) CS-25 大型飞机序言手册 1 — 认证规范子部分 A — 总则子部分 B — 飞行子部分 C — 结构子部分 D — 设计和构造子部分 E — 动力装置子部分 F — 设备子部分 G — 操作限制和信息子部分 H — 电气线路互连系统子部分 J — 辅助动力装置安装附录 A附录 C附录 D附录 F附录 H — 持续适航说明附录 I — 自动起飞推力控制系统(ATTCS)附录 J — 紧急演示附录 K — 交互系统和结构 附录 L 附录 M — 降低燃油箱可燃性的方法 附录 N — 燃油箱可燃性暴露 附录 O — 过冷大滴结冰条件 附录 P — 混合相和冰晶结冰包层(深对流云) 附录 Q — 批准陡峭进近着陆(SAL)能力的附加适航要求 附录 R — HIRF 环境和设备 HIRF 测试水平 附录 S — 非商业运营飞机和低载客量飞机的适航要求 手册 2 – 可接受的合规方式 (AMC) 简介 AMC – 子部分 B AMC – 子部分 C AMC – 子部分 D AMC – 子部分 E AMC – 子部分 F AMC – 子部分 G