XiaoMi-AI文件搜索系统
World File Search System伺服

目录,2007 年 5 月 - Micron 无线电控制
DSP 解码器:ECO、MAX 和 FET 接收器配有可选智能解码器。它使用数字信号处理(因此称为 DSP )在受到干扰时提供优雅的降级。它分析控制帧以确定是否受到干扰(或噪声)的影响,如果某个帧被认为是坏的,则每个输出通道设置为最后 4 帧的平均值。结果是伺服响应在受到相当大的干扰时会减慢,而不是到处跳跃。最终,解码器决定信号已完全损坏或已丢失,并进入“故障安全”模式。可以从 Micron 网站下载 DSP 接收器设置指南或 DSP 解码器套件组装手册,了解更多详细信息。

使用ESP32和PS3控制器的机器人臂车辆
该项目调查了机器人ARM车辆的设计,实施和性能评估,以解决ESP32微控制器,PS3控制器和伺服电动机集成到统一系统中所遇到的挑战和解决方案。此外,本文强调了该技术的潜在应用,包括其在教育环境,研究设施和工业自动化中的相关性。通过此分析,我们旨在证明在创建高级机器人系统中具有成本效益且可广泛可用的组件的功能。通过将ESP32微控制器的功能与PS3控制器提供的用户友好控件合并,我们建立了一个可以针对各种任务和设置量身定制的多功能平台。

精准至上 - Roger Barber Publishing
西铁城专利的低频振动 (LFV) 加工技术已开始投入使用,今年计划生产 584 台机器。它与一些更传统的机器上使用的任何形式的宏编程或机械振动完全不同。它是专业软件和机械工程包的完全集成组合,通过机器控制器上的 G 代码激活。它使机器的 X 和 Z 伺服轴能够在轴向上振荡或“后退”,涉及数十微米的运动,这些运动与主轴驱动器的旋转同步。由于脉冲产生的微小“空切”运动,切削刀具产生的切屑的实际长度可以在控制器上进行编程,并在生产周期内按需要进行排序。
MIL-HDBK-5400.pdf - 先进测试设备租赁
电阻器 ... 半导体设备 伺服设备,旋转 ..插座、屏蔽和安装垫 插座 屏蔽 安装垫 弹簧 ...标准电子模块 (SEM) 开关 安装 旋转开关 拨动开关 终端 ....每个端子或接线片的电线数量 每个端子的接线片数量· ...连接器触点中的电线数量 变压器、电感器和线圈 电子管: ......波导及相关项目 电线电缆 ...... ~ 电线电缆,内部 内部布线实践 .电线电缆,外部互连 外部布线实践 同轴电缆 (RF) .....-印刷线路 ...... .材料选择 ....材料选择 .. 聚氯乙烯 (PVC) 材料 标准材料 .非标准材料 非标准材料的批准 粘合剂

Kinetica-1固体运载火箭发展现状及主要应用进展 Kinetica-1固体运载火箭发展现状及主要应用进展
部署在酒泉卫星发射中心,配备机动式环境保障装置,具有快速反应、灵活使用、高效发射、批量储存、滚动备份等特点。2022年7月27日北京时间12时12分,Kinetica-1火箭从酒泉卫星发射中心成功将6颗卫星发射至500公里的卫星轨道。首飞载荷1068.63千克,全部卫星总重899千克。飞行过程中,各级固体发动机、伺服跟踪指令、级间分离、星箭整流罩均正常,6颗卫星准确送入预定轨道,获得过载、振动、冲击、噪声等完整遥测数据。本次首飞任务

2025 美元媒体工具包
• 5G 无线电 • 增材层制造 • 先进材料 • 发动机辅助系统 • 天线 • 人工智能 (AI) • 自动驾驶仪 • 电池 • 线束 • 复合材料 • 连接器 • 数据存储 • 设计软件 • 电动机 • 嵌入式计算 • 发动机控制单元 • 燃料电池 • 万向架 • 地面控制系统 • 图像传感 • IMU、陀螺仪和加速度计 • 发射系统 • 激光雷达 • 机器学习 • 机床 • 维护 • 运动控制 • 电机控制器 • 导航系统 • 降落伞 • 性能监控 • 个人信息系统 • 电源管理系统 • 螺旋桨 • 无线电链路和遥测 • 实时操作系统 • 感知与规避/雷达 • 伺服执行器 • 模拟与测试 • 太阳能 • 声纳与声学系统 • 群集 • 热传感器 • 应答器 • UTM • 视频编码

2025 欧元媒体套件
• 5G 无线电 • 增材层制造 • 先进材料 • 发动机辅助系统 • 天线 • 人工智能 (AI) • 自动驾驶仪 • 电池 • 线束 • 复合材料 • 连接器 • 数据存储 • 设计软件 • 电动机 • 嵌入式计算 • 发动机控制单元 • 燃料电池 • 万向架 • 地面控制系统 • 图像传感 • IMU、陀螺仪和加速度计 • 发射系统 • 激光雷达 • 机器学习 • 机床 • 维护 • 运动控制 • 电机控制器 • 导航系统 • 降落伞 • 性能监控 • 个人信息系统 • 电源管理系统 • 螺旋桨 • 无线电链路和遥测 • 实时操作系统 • 感知与规避/雷达 • 伺服执行器 • 模拟与测试 • 太阳能 • 声纳与声学系统 • 群集 • 热传感器 • 应答器 • UTM • 视频编码

每个教室的STEM,机器人技术和计算机科学
包括:1位控制器(机器人大脑),1个微型:位,1个终端工具,1个电池组(4XAA),1个绿色LED,1个红色LED,1个红色LED,2个三色LED,2个位置伺服器,2个旋转伺服器,2个旋转伺服器,2个伺服器,2个伺服器,2个塑料块适配器,2个塑料套件,4个伺服延长电缆,1个灯具,1个式传感器,1距离传感器,1距离传感器,1距离传感器,1距离传感器,1距离传感器,1距离传感器,距离,1距离传感器,1个距离,1距离传感器,1距离传感器。套件案

基于视觉的商用飞机着陆 - eucass
摘要 本文介绍了一种基于视觉的着陆 (VBL) 概念,该方法整合了以下贡献:a) 利用飞行员交互来利用人类卓越的物体识别能力。这大大减少了视觉系统必须覆盖的搜索空间。飞机数据、已知情景背景和背景信息也被整合在一起。b) 一种不同的设计方法,包括多种图像处理 (IP) 算法的组合,提高了从早期进近到着陆和在不同环境条件下滑行的整个距离范围的稳健性。c) 使用此处介绍的结果进行飞机控制的视觉伺服在随附的论文中进行了展示。13 对于初步测试,已经实施了合成图像的模拟。
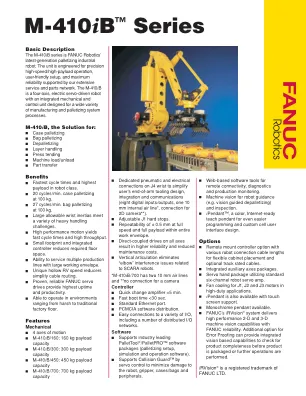
M-410iB™系列 - 紫光集团
选项 远程安装控制器选项,带有 ■ ■ 各种机器人连接电缆长度,可灵活放置机柜,并可选配轨道额定电缆。集成辅助轴包。■ ■ 伺服手包采用标准 ■ ■ 六通道机器人伺服放大器。在 ■ ■ 高负荷应用中,J1、J2 和 J3 电机采用风扇冷却。i ■ ■ 吊坠也支持触摸屏。提供单色吊坠。■ ■ FANUC 的 ■ ■ i RVision ® 系统提供高性能 2-D 和 3-D 机器视觉功能,具有 FANUC 可靠性。错误校对的附加选项可以提供基于集成视觉的功能,以便在包装产品或执行进一步操作之前检查产品的完整性。