XiaoMi-AI文件搜索系统
World File Search System凉亭
![arxiv:2502.10218V1 [CS.RO] 2025年2月14日](/simg/b\b0a60d6204e5bce28e8ffb431300febf4de84729.webp)
arxiv:2502.10218V1 [CS.RO] 2025年2月14日
摘要。仿真框架在机器人应用的安全性中起着关键作用。然而,最好在不同的环境/模拟器中最好模拟设想的机器人系统的不同组件。这在将整个项目模拟成单个集成的机器人框架中构成了重大挑战。具体来说,对于部分开放或闭合源模拟器,通常会出现两个核心限制。i)场景中的参与者除指定机器人以外的其他界面无法控制诸如ROS和ii)的界面(例如)实时状态信息(例如姿势,速度等)场景中的对象都可以防止。在这项工作中,我们解决了这些局限性,并描述了我们的解决方案,用于集成由强大的模拟器sphinx(由Parrot无人机提供)模拟的空中无人机中的用例中。我们通过将无人机的镜像实例实现,该实例包含在现有的基于凉亭的环境中。我们集成的仿真环境的有希望的应用是目标跟踪的任务,这在空中多机器人方案中很常见。因此,为了证明我们的集成仿真的有效性,我们还提出了模型预测控制器(MPC),该模型胜过鹦鹉在各种动态跟踪方案中提供的默认基于PID的控制器框架,从而增强了整个系统的实用性。源代码发表在https://github.com/robot-poception-group/anafi_sim上。我们通过在现有的基于凉亭的仿真中包括ANAFI无人机来测试解决方案,并通过在模拟和真实世界跟踪实验中对定制PID控制器基线进行严格测试来评估MPC的性能。

印度可再生能源领域的宝藏
摘要:可再生能源已成为电力部门世界中不可避免的能源。尤其是像印度(人口第二大)这样的国家,为整个国家提供动力并不是一件容易的事。通常,我们取决于在任何时间点要消散的常规能源。因此,现在我们返回凉亭,开始使用非常规能源,例如我们的祖先。与常规来源不同,非惯性来源本质上是丰富的。当进行协调时,这些来源将更加有效。主要是通过风和太阳能进行协调。在本文中,我们要揭示隐藏的宝藏,泵储存的发电厂(PSP)的优点和缺点。关键字:协调,抽水储存电厂,混合技术。
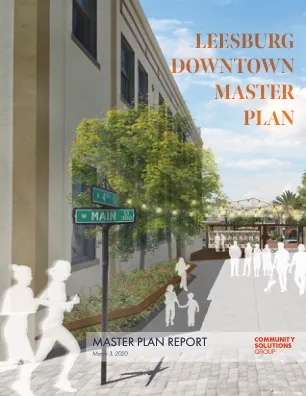
利斯堡市中心总体规划
在过去的两年中,市政府一直在不断改进这座城市的“瑰宝”——威尼斯花园公园。公园内新建了室内凉亭,罗杰斯公园游乐场也进行了改进,还建造了新的戏水池。被称为滑雪海滩的滨水区也进行了翻新,包括修建了新道路、人行道、船坡、新卫生间、装饰围栏和多用途休闲路径。该计划的最后阶段包括拆除现有的旧游泳池和社区建筑。该地区已经重新开发,包括建造新的社区建筑和零售/餐饮活动空间。增加如此多的活动用途需要研究如何改善公园与主街的关系。

气体附录:为自动驾驶汽车系统生成快速准确的替代模型
图1显示了在玉米田中车辆相机收集的现实世界图像的原始验证数据集上,作物 - 监测工具[1]使用的RESNET-18网络的错误分布。左右图分别用于标题和距离感知误差。直方图显示实际误差频率,而线路显示拟合的正态分布。分布与直方图非常匹配,表明神经网络的误差是正态分布的。图2从视觉上比较了神经网络输出分配与凉亭内捕获的图像预测的分布。红色虚线椭圆和蓝色实心椭圆显示了神经网络输出分布的3σ置信边界和感知模型预测的分布。这两个分布彼此紧密匹配,尤其是当车辆在中心附近并直接指向前方时。

cv
对CVPR SOTA的准确性提高。纽约顾问,纽约及纽约的3D高斯剥落:霍姆·孙教授,人民大学和哥伦比亚大学哥伦比亚大学Changxi Zheng教授,2024年8月 - 目前•设计的物理学深度神经网络可从纯粹的视觉监督下自动估算,以推断出可比较的范围: BIM Model Reconstruction System (Bachelor Thesis Project with $15000 founding) Ningbo, CN Advisor: Prof. Adam Rushworth, University of Nottingham, Ningbo Jun 2021 – Jul 2022 • Designed and prototyped a novel autonomous mobile robot system for Building Information Modeling (BIM) • Built modular hardware stack with multi-modal sensors, Jetson Xavier AGX computing unit, and robust power & signal系统•构建了一个完整的基于ROS的软件堆栈,包括乌尔德设计,低级控制,凉亭仿真,基于激光雷达纽约顾问,纽约及纽约的3D高斯剥落:霍姆·孙教授,人民大学和哥伦比亚大学哥伦比亚大学Changxi Zheng教授,2024年8月 - 目前•设计的物理学深度神经网络可从纯粹的视觉监督下自动估算,以推断出可比较的范围: BIM Model Reconstruction System (Bachelor Thesis Project with $15000 founding) Ningbo, CN Advisor: Prof. Adam Rushworth, University of Nottingham, Ningbo Jun 2021 – Jul 2022 • Designed and prototyped a novel autonomous mobile robot system for Building Information Modeling (BIM) • Built modular hardware stack with multi-modal sensors, Jetson Xavier AGX computing unit, and robust power & signal系统•构建了一个完整的基于ROS的软件堆栈,包括乌尔德设计,低级控制,凉亭仿真,基于激光雷达

自主拖拉机的虚拟设计和模拟
摘要: - 此项目介绍了可以使用机器人操作系统(ROS)和凉亭在农业领域导航的自主拖拉机的设计和模拟。使用Fusion 360构建拖拉机模型并将其导入ROS。拖拉机使用LIDAR传感器使用Gmapping算法执行同时定位和映射(SLAM)。拖拉机还将Dijkstra算法和动态窗口方法(DWA)分别用于全局和局部路径计划。使用PID控制器控制拖拉机的运动。模拟结果证明了拖拉机在遵循预定义路径时绘制环境,定位并避免障碍物的能力。该项目还讨论了拟议方法论的挑战和局限性,以及未来工作的范围。

混凝土 - 结构调查
位于 Bassins à Flot 的湿船坞是波尔多这座港口城市的一个重要景观。作为该市北部地区重建的一部分,湿船坞已成为公共空间的主要区域。经过 18 个月的工作,其中一个重建项目最近已完工——由 Eiffage Construction Sud-Ouest 建造的 G7 和 G8 多功能建筑。由 Martin Duplantier Architects 设计的 4300 平方米的 G8 地块位于最后一段林荫大道和码头之间;它设有一所商学院和零售店。其引人注目之处在于四个混凝土立面。该建筑的底层大部分为开放式,让人回想起该地块的工业历史,同时赋予其抽象、永恒的美感。一楼有两个大露台,上面覆盖着混凝土凉亭(如上图所示),为游客创造了有利于互动的空间。(照片:Schnepp Renou。)

一种非线性模型预测控制策略,用于秤车的自主赛车
摘要 - 本文介绍了旨在控制用于自主赛车竞赛的小型汽车模型的非线性模型预测控制(NMPC)策略。拟议的控制策略涉及将车辆时间最小化,同时将车辆保持在轨道边界范围内。优化问题考虑了车辆的致动极限以及作用于Pacejka魔法公式和简单传动系统模型的汽车上的侧面和纵向力。此外,该方法允许在静态障碍物填充的轨道上安全地竞争,从而产生无冲突的轨迹并跟踪它们,同时增强膝盖正时性能。使用F1/10模拟器的凉亭模拟展示了拟议的控制策略的可行性和有效性。该代码作为开源释放,使得可以复制获得的结果。索引术语 - 非线性模型预测性控制,Au au sopos Racing,F1/10模拟器,自动驾驶汽车导航。

使用您的自动表面车辆的本地化跟踪
摘要。自动型表面车辆(ASV)由于其广泛的应用而成为重要的研究重点。ASV发展中的一个主要挑战是对水面上的物体(例如浮标)的快速而准确的检测和鉴定。本研究研究了Yolov5在ASV上的浮标检测,重点是机器人操作系统(ROS)框架内的路径定位。路径定位用于根据浮标检测来确定血管的路线及其通过测试路径的移动。结果表明,Yolov5在检测ROS生态系统组成部分的凉亭模拟器内检测边界浮标时达到了100%的精度。此外,ASV能够沿着测试路径的中心准确导航,而不会与边界浮标相撞。这项研究有望为ASV技术的发展做出重大贡献。
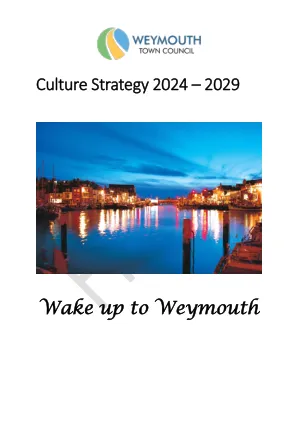
文化策略2024-2029
凉亭剧院始建于1960年,建于港口和滨海滨海滨海地区之间的回收土地上,丽思剧院于1954年被大火摧毁。馆由韦茅斯和波特兰自治市镇议会拥有和运营,为当地社区团体和学校提供了一个场地,并举办了季节性的“竞争”娱乐活动,以及全年的表演和活动。未能在2006年重新生成该地区的提议,导致理事会宣布拆除剧院,并于2013年5月31日关闭,但在正式的招标程序之后,该剧院被租给了当地商人,并于2013年7月13日重新开放。Weymouth Pavilion现在由Weymouth Pavilion CIC作为非营利组织运营。