XiaoMi-AI文件搜索系统
World File Search System单重

单中心体验
海绵窦硬脑膜动脉瘘(CS-DAVF)的抽象背景,眼科症状通常是主要的临床表现,是由上静脉静脉(SOV)异常引流引起的。脑血管造影过程中SoV的早期不透明不可避免地表示瘘管在SoV和CS汇合处的分流点。我们旨在利用这一解剖学特征来实现精确的栓塞,从而提高了栓塞成功率并防止了与CS相关的症状和因过度包装而引起的并发症。方法是在2017年5月至2023年9月之间进行的单中心案例系列研究,其中包括通过transhisteral-Sov方法治疗的CS-DAVF患者的最大样本。我们回顾性地审查了32个CS-DAVF肌瘤下窦(IPS)闭塞患者的数据。结果这项研究表明,术后立即完全栓塞率(31/32,97%)。只有三名患者(3/32,9%)出现了暂时的与血管内治疗相关的并发症。平均操作时间为131.6±61.6分钟,平均每名患者使用的1.2±1.1线圈和1.8±1.2 ml Onyx胶。CS-DAVF相关的眼科症状均在所有患者中得到解决。我们还确定了一种罕见的解剖变异,其中77%的患者面部静脉排入外颈静脉。结论在CS-DAVF患者的IPS和主要是SoV引流的CS-DAVF患者中,应将股静脉栓塞栓塞视为至关重要的替代方法。这种方法显示出极好的术后完整栓塞率和令人满意的长期结局以及临床安全性。因此,我们强烈主张“眼睛对眼睛”的治疗策略。

方法 - 单镜
我很高兴感谢几位学生和同事给予我的帮助。 H~l~ne Ardila、Stephen Buuerlield、Maria Carvalho、Lisa King、Ann Knapp 和 Roben Schusano 粗略地完成了翻译的许多草稿的前言部分,作为课堂项目 Jennifer Nash 和 Barbara Todd 完成了大部分初始打字工作。多年来,Marist 计算设施的工作人员也一直支持这项工作,特别是 Cecil Denney、Harry Williams 和 Karen Flowers。如果没有现任学术计算主任 Marybeth Commisso,这本书就永远不会问世。还要衷心感谢 Anne Joi'dan 用计算机生成文本和图形。三位同事通过他们的论文帮助改进了我的介绍:Peter Amato、Italo Benin 和 Leo Bostar;特别感谢 Peter 持续的、几乎每天的对话。学术副校长 Andrew Molloy 和 Marc vanderHeyden 为成功的休假申请提供了支持。还要感谢 Peter 的 Tom Derdak 和 Christine Marra Lang Publishing 使本书诞生。最后,我要衷心感谢 Edgar Morin 的宝贵友谊。Traduaor traduor。我们开始这项工作时的一个鸡尾酒短语,现在已成为现实。作品的丰富性使其无法翻译成其他语言甚至其他媒体。尽管如此,这项任务必须完成,并且没有遗憾。英语公众现在可以阅读 Edgar Morin 方法的第一卷,并成为
8197 医疗单
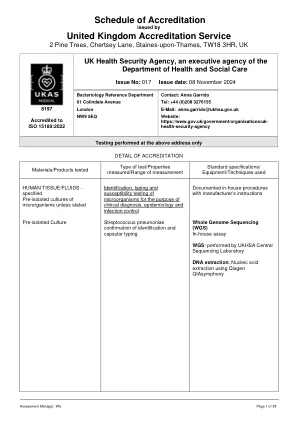
表型表征和血清分型内部检测表型方法:在选择性培养基和商业试剂上培养(如果需要,由 AMRHAI 提供 Mast、Pro-lab、MALDI-TOF 或 16S 测序)BRD0099 - 流感嗜血杆菌分离株的处理和鉴定以及 a-内酰胺酶的产生程序,BRD0100 - 流感嗜血杆菌的血清分型 PCR 用于确认流感嗜血杆菌物种 ID 和荚膜类型 DNA 提取:商业试剂(Instagene 树脂、BIORAD)、热块 PCR 扩增和可视化:基于块的 PCR、Veriti 热循环仪、Invitrogen PCR mastermix、Invitrogen E-gel、Syngene Gel Doc 系统。BRD0197 - 使用 InstaGene 基质(Bio-Rad)从细菌中提取 DNA BRD0103 - 通过 PCR 确认和鉴定流感嗜血杆菌物种和血清型


scperturb:统一的单...
最近的生物技术进步导致了越来越多的单细胞研究,这揭示了对大量扰动的分子和表型反应。但是,跨不同数据集的分析通常会受到格式,命名惯例,数据过滤和归一化的差异的阻碍。为了促进系统生物学中计算方法的开发和基准测试,我们收集了一组具有分子读数的44个公开可用的单细胞扰动 - 响应数据集,包括转录组学,蛋白质组学和表观基因组学。我们采用统一的预处理和质量控制管道并协调特征注释。最终的信息资源可以有效地开发和测试计算分析方法,并促进了整个数据集的直接比较和集成。使用这些数据集,我们演示了电子距离的应用,以量化扰动相似性和强度。这项工作为研究人员提供了一种信息资源和指南,并指导了使用单细胞扰动数据,并突出了新实验的概念注意事项。数据收集,Scperturb,可在scperturb.org上公开获得。

用单臂3- ...
摘要:这项工作提出了配备了单臂3度的机器人操纵器的无人机的设计和开发,旨在增强无人机(无人机)的多功能性和功能。机器人臂的整合将无人机的功能扩展到传统的空中监视之外,从而使其能够在各个行业和社会领域执行复杂的操纵任务。该项目涵盖了几个关键阶段,包括使用SOLIDWORKS设计机器人臂和与PLA材料的3D打印,使用ROS2 Humble实施控制算法,以及与飞行控制器板集成以进行无缝操作。通过一种全面的方法,该项目旨在通过附加的操纵器实现无人机的最佳设计,精确控制和有效的操作。这项研究的结果与行业,社会和学术机构具有很大的相关性,这有助于机器人和无人系统的技术创新,社会影响以及进步。关键字:无人机;机器人; 3dof;操纵器;臂