XiaoMi-AI文件搜索系统
World File Search System双手


通过大脑实现双手机械臂的共享控制......
智能机器人系统和脑机接口 (BMI) 的进步帮助患有感觉运动障碍的个体恢复了功能和独立性;然而,由于通过用户输入以协调的方式控制多个肢体的多个自由度 (DOF) 的技术复杂性,需要双手协调和精细操作的任务仍然未得到解决。为了应对这一挑战,我们实施了一种协作共享控制策略来操纵和协调两个模块化假肢 (MPL) 以执行双手自我进食任务。一位在感觉运动大脑区域有微电极阵列的人类参与者向两个 MPL 发出命令来执行自我进食任务,其中包括双手切割。从双侧神经信号解码运动命令,以一次控制每个 MPL 上的最多两个 DOF。共享控制策略使参与者能够将其四自由度控制输入(每只手两个)映射到多达 12 个 DOF,以指定机器人末端执行器的位置和方向。通过使用神经驱动的共享控制,参与者成功同时控制了两个机械肢体的运动,从而在复杂的双手自主进食任务中切开和进食食物。通过 BMI 与智能机器人行为协作实现的双手机器人系统控制的演示对于恢复感觉运动障碍患者的复杂运动行为具有重要意义。

双手机器人操纵的3D策略扩散
图1:BI3D扩散器演员的概述。顶部:BI3D扩散器Actor是一个条件扩散模型,生成两个端效应器的3D轨迹。类似于[13],在每个扩散步骤I中,我们的模型将机器人未来最终效应器轨迹的噪声估计值,提出RGB-D视图O和本体感受信息c。这些令牌是通过注意,使用3D相对位置信息的上下文对语言进行的,并参与语言令牌l以融合教学信息。Our model predicts the noise of left- and right-hand 3D locations ( ϵ loc θ,l ( o , l, c l , τ i l , i ) and ϵ loc θ,r ( o , l, c r , τ i r , i ) ) and the noise of left- and right-hand 3D rotations ( ϵ rot θ,l ( o , l, c l , τ i l , i ) and ϵ rot θ,r ( o , l, c r , τi,r i)。底部:在推断期间,BI3D扩散器演员迭代地将未来双手轨迹的估计值降低。

“双手、头脑和心灵”。关于服务学习的思考,...
项目描述 UFS 与 Bloemshelter 合作,举办一年一度的学习节,这是一项包容性的教育活动,为所有人提供机会,让他们齐聚平等平台,分享、学习或扩展技能、知识和专业知识,从而实现可持续的生计。重点关注旨在促进终身行动学习、发展网络的获取和建立、技能转移和成长、可持续生计、自营职业、业务发展、平衡人、地球和利润三重底线、关爱和社会资本发展、转型和积极的社会经济和环境变化、加强二元经济(民用和公共)和转型的活动。
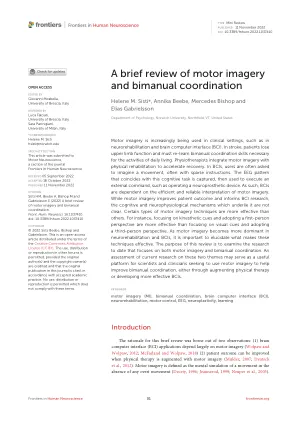
运动意象和双手协调的简要回顾
运动意象疗法在临床环境中的应用越来越广泛,例如神经康复和脑机接口 (BCI)。中风后,患者会失去上肢功能,必须重新学习日常生活活动所必需的双手协调技能。物理治疗师将运动意象疗法与物理康复相结合,以加速康复。在 BCI 中,用户通常被要求想象一个动作,通常带有稀疏的指令。与此认知任务相吻合的 EEG 模式被捕获,然后用于执行外部命令,例如操作神经假体装置。因此,BCI 依赖于对运动意象的有效和可靠的解释。虽然运动意象疗法可以改善患者的治疗效果并为 BCI 研究提供信息,但其背后的认知和神经生理机制尚不清楚。某些类型的运动意象疗法比其他类型的更有效。例如,关注运动提示和采用第一人称视角比关注视觉提示和采用第三人称视角更有效。随着运动想象在神经康复和 BCI 中变得越来越占主导地位,阐明这些技术有效的原因非常重要。本综述的目的是研究迄今为止专注于运动想象和双手协调的研究。对这两个主题的当前研究的评估可以作为科学家和临床医生寻求使用运动想象来帮助改善双手协调的有用平台,无论是通过增强物理治疗还是开发更有效的 BCI。

基于增强现实的双手机器人远程操作界面
摘要:双手机器人的远程操作正用于执行复杂的任务,例如医学手术。尽管技术取得了进步,但当前的界面对用户来说并不自然,他们花费大量时间来学习如何使用这些界面。为了缓解这个问题,本文提出了一种基于增强现实的新型远程操作双手机器人界面。所提出的界面对用户来说更自然,并减少了界面学习过程。本文详细介绍了所提出的界面,并使用两个工业机器人操纵器通过实验证明了其有效性。此外,还分析了使用操纵杆的经典远程操作界面的缺点和局限性,以突出所提出的基于增强现实的界面方法的优势。

深度 EEG 和 fNIRS 实时解码双手力量
摘要 — 与侵入式脑机接口 (BCI) 相比,非侵入式皮质神经接口在肢体运动及其力量的皮质解码方面仅取得了中等水平的表现。虽然非侵入式方法更安全、更便宜、更容易获得,但信号在空间域 (EEG) 或时间域 (功能性近红外光谱 (fNIRS) 的 BOLD 信号) 中分辨率较差。之前从未实现过双手力产生和连续力信号的非侵入式 BCI 解码,因此我们引入了一个等距握力跟踪任务来评估解码。我们发现,使用深度神经网络结合 EEG 和 fNIRS 比线性模型更能解码左手和右手产生的连续握力调节。我们的多模态深度学习解码器在力重建中实现了 55.2 FVAF[%],并且解码性能比每种单独的模态提高了至少 15%。我们的结果表明,使用非侵入性移动脑成像获得的皮质信号实现连续手力解码的方法对康复、恢复和消费者应用具有直接影响。

经过多日的练习,完成双手控制任务的从头运动学习
经过多天的练习,完成双手控制任务的从头运动学习 Adrian M. Haith 1 、Christopher Yang 2 、Jina Pakpoor 1 和 Kahori Kita 1 约翰霍普金斯大学 1 神经病学系、2 神经科学系,美国马里兰州巴尔的摩 摘要 尽管关于运动学习的许多研究都集中在我们如何调整动作以在面对强加的扰动时保持表现,但在许多情况下,我们必须从头学习新技能,或者从头学习。与适应相比,人们对从头学习知之甚少。部分原因在于学习一项新技能可能涉及许多挑战,包括学习识别新的感觉输入模式和产生新的运动输出模式。但是,即使有了熟悉的感觉线索和练习过的动作,根据当前状态快速选择适当的动作仍然是一个挑战。在这里,我们设计了一个双手手到光标映射来隔离这个控制问题。我们发现,尽管参与者对映射有明确的了解,但他们最初还是难以在这种双手映射下控制光标。然而,经过多天的练习,表现稳步提高。参与者在恢复到真实光标时没有表现出任何后遗症,这证实了参与者是从头开始学习新任务的,而不是通过适应。对目标中途运动扰动的纠正反应最初很弱,但随着练习,参与者逐渐能够对这些扰动做出快速而有力的反应。经过四天的练习,参与者在双手映射下的行为几乎与使用真实映射光标时的表现相匹配。然而,在表现水平上仍然存在微小但持续的差异。我们的研究结果说明了学习新控制器的动态和局限性,并引入了一个有前途的范例,用于研究运动技能学习的这一方面。 通讯作者:Adrian Haith 209 Carnegie 550 North Wolfe Street Baltimore, MD, 21287, USA adrian.haith@jhu.edu 简介

基于滑动触摸的探索,用于用多指双手建模未知对象形状
摘要:氧气进化反应(OER)为许多电催化功率对X过程提供了质子,例如从水或CO 2中产生绿色氢或甲醇。含氧氧化物(IOHS)是该反应的出色催化剂,因为它们在酸性电解质中的活性和稳定性之间取得了独特的平衡。在IOHS中,此平衡随原子结构而变化。 虽然无定形IOH的表现最佳,但它们是最不稳定的。 相反,它们的结晶对应物是正确的。 这些规则用于减少稀缺的IOH催化剂的负载并保留性能。 但是,尚不完全了解活动和稳定性在原子水平上如何相关,从而阻碍了理性设计。 在此,我们提供了简单的设计规则(图12),这些规则源自本研究中的文献和各种IOH。 我们选择了晶体IROOH纳米片作为我们的铅材料,因为它们提供了出色的催化剂利用和可预测的结构。 我们发现,iRooh在超过无定形IOH的活性的同时表示晶体IOH的化学稳定性。 其致密的锥体三价氧(μ3Δ-O)的密集键合网络提供了结构完整性,同时允许可逆还原到电子间隙状态,从而减少了还原电位的破坏性效果。 反应性起源于具有自由基特征的协调不饱和边缘位点,即μ1-o oxyls。 我们希望这些规则将激发未来催化剂的原子设计策略。 ■简介在IOHS中,此平衡随原子结构而变化。虽然无定形IOH的表现最佳,但它们是最不稳定的。相反,它们的结晶对应物是正确的。这些规则用于减少稀缺的IOH催化剂的负载并保留性能。但是,尚不完全了解活动和稳定性在原子水平上如何相关,从而阻碍了理性设计。在此,我们提供了简单的设计规则(图12),这些规则源自本研究中的文献和各种IOH。我们选择了晶体IROOH纳米片作为我们的铅材料,因为它们提供了出色的催化剂利用和可预测的结构。我们发现,iRooh在超过无定形IOH的活性的同时表示晶体IOH的化学稳定性。其致密的锥体三价氧(μ3Δ-O)的密集键合网络提供了结构完整性,同时允许可逆还原到电子间隙状态,从而减少了还原电位的破坏性效果。反应性起源于具有自由基特征的协调不饱和边缘位点,即μ1-o oxyls。我们希望这些规则将激发未来催化剂的原子设计策略。■简介通过与其他IOH和文献进行比较,我们概括了我们的发现并综合了一组简单的规则,这些规则可以预测原子模型中IOH的稳定性和反应性。