XiaoMi-AI文件搜索系统
World File Search System可倾斜
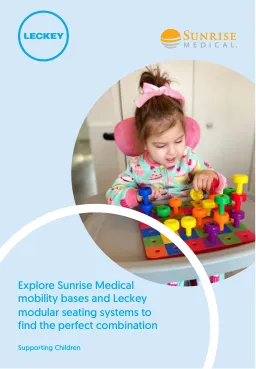
探索日出医疗机动性基础和Leckey模块化座椅系统以找到完美的组合
•与传统的单个枢轴倾斜相反,快速虹膜“太空中的旋转”技术是通过摇杆系统实现的。这意味着用户的质量中心始终位于椅子的中心上,因此,无论施加多少倾斜度,底座都是稳定且易于操纵的。摇滚系统还允许一种更光滑的倾斜机制,这意味着与经常生涩且不受控制的单个枢轴倾斜相比,用户的认知或色调反应不太可能。

基于 LPV 模型的 eVTOL 飞机自适应 MPC 运行过程中...
摘要:本文将新颖的 LPV(线性参数变化)模型和 MPC(模型预测控制)方法应用于电动垂直起降飞机的倾斜过渡过程,该飞机具有六个分布式电动旋翼和固定翼,用于平飞,其中两个旋翼可倾斜以在从悬停到稳态平飞的倾斜过渡期间产生可变推力矢量,其余四个旋翼不能倾斜。在平飞过程中,固定翼引起的气动升力保持飞行高度。基于由倾转旋翼角位置和故障旋翼速度预定的标称倾斜轨迹,通过沿倾斜轨迹线性化非线性 eVTOL 飞机模型,基于显著减少的线性时不变模型数量构建了离散时间 LPV 模型,其中倾转旋翼角度和故障旋翼速度可以实时测量。提出了一种基于σ移位H 2 范数的LPV建模误差评估方法,并设计了具有动态参考补偿的自适应模型预测控制器。仿真研究表明,基于转子故障倾斜过渡LPV模型的自适应MPC策略是成功的。
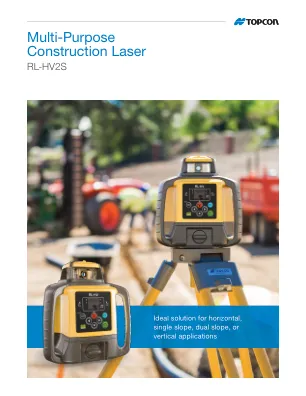
多用途构造激光器-RL-HV2S
为各种任务设计的多用途应用程序,可用于水平,倾斜和垂直激光应用。可以在X或Y轴上使用±5%(使用倾斜板的±15%)。将其转向其一侧,并将其用于布局和对齐作业。
形式DNA-A分子动力学仿真研究的基本翻转
曲线+ [26]。基本对中的变化通常由参数x-disp,y-disp,倾斜和尖端描述(如图s6),其中X-DISP描述了沿X轴的基本对的位移,Y- DESP描述了沿Y轴的碱基对的位移,倾斜描述了X轴围绕X轴的基本对的旋转角,尖端描述了围绕Y轴的碱基对的旋转。我们选择X- disp,y-disp,倾斜,目标碱基的尖端和DNA小凹槽的宽度,以研究从无偏的分子动力学模拟中研究两种DNA结构的差异。

SEM 实验中电子束诱导样品加热的测量
图 2 测量的铁的电阻率和相应的样品温度,a) 0° 倾斜和 b) 70° 倾斜时暴露于电子束,作为加速电压、束电流和停留时间的函数。数据点根据束电流按形状分组,浅色表示停留时间为 1ms,深色表示停留时间为 1µs。

“最小脑功能障碍”(MBD)对脚,膝盖,臀部,骨盆和脊柱发育的影响,原因,诊所治疗
骨盆前倾斜和腰椎的Hiperlordosis [4-24](图5)。在脑功能障碍(MBD)最小的儿童中,与脚部的外翻畸形无关,膝盖的再现经常会观察到骨盆的前倾斜,并伴有腰椎的hiperlordosis。这种病理是由于臀部屈肌的缩短 - 均值 - 闭合 - 主要是m的缩短。直肌。这种畸形对儿童所谓的特发性脊柱侧弯的发展具有很大的影响。在成年人中是“背部疼痛综合征”的原因,这是由于“骨盆前倾斜”和下一个“腰椎倍增分”。骨盆的前倾斜,减少了复杂的稳定性 - “骨盆 - s骨 - 腰椎” - 使脊柱侧弯的发育和进展易于发展和进展。关于这种影响的首次观察是由Donat Tylman教授和1960年 - 1960年 - 1960年华沙的KazimierzRapała教授给出的。

两轮自驾机器人的开发与原型设计
摘要:移动机器人技术是机器人技术的一个分支,在该分支中,自平衡机器人类别尤其令人感兴趣,因为这些机器人有望像人类一样在困难的地形上行走,并可用作研究自主控制系统的平台。本文旨在总结两轮自平衡机器人的发展,并以此作为案例研究,展示计算机控制系统在物理系统中的应用。互补滤波器与三轴陀螺仪和加速度计一起使用,以精确测量两轮机器人的旋转,并将数据提供给比例-积分-微分 (PID) 程序,该程序相应地控制电机的功率,以控制其倾斜并实现自平衡。简而言之,机器人设法在小倾斜角度范围内实现自平衡,但是,设计缺陷(例如传感器在较大倾斜角度下脱落)会导致较大倾斜角度下的不稳定。在未来的工作中,可以采用更复杂的控制算法,并可以彻底探索不同机器人构造的影响。

设计和实施复杂的自我平衡机器人
摘要:本文提出了一个合作的自动平衡系统,该系统利用两个自主机器人,用压力传感器增强和手动倾斜控制开关。该系统旨在通过在两个机器人之间均匀分配重量,同时允许在需要时手动控制倾斜角度,从而在气垫板上实现稳定的平衡。每个机器人都配备了自己的一组传感器,包括压力传感器,以测量垫板上施加的力。机器人之间的通信使实时协调能够根据压力传感器的反馈来调整单个倾斜角度,从而确保合作平衡。此外,手动倾斜控制开关为用户提供了暂时覆盖自主平衡逻辑的能力。所提出的系统为合作平衡应用提供了一种多功能平台,展示了机器人技术,传感器技术和人机相互作用的整合,以进行动态稳定性控制。进行了实验验证和测试,以评估系统在不同情况下保持稳定平衡及其整体绩效的有效性。

DSC 10/20 | DMBA
倾斜调整 = 精确 DBM-350 具有两个倾斜调整功能。第一个位于机器的前面。它调整折叠止动器的角度以纠正折叠错位。第二个刻度盘位于机器内部。这将在整理好的纸张到达装订头之前调整其导轨。如果纸张的预切不正确,这将很有用。