XiaoMi-AI文件搜索系统
World File Search System可观测性
机翼形状的辅助惯性估计 - oatao
先进的大翼展飞机具有更大的结构灵活性,但可能出现不稳定或操纵性差。这些缺点需要稳定性增强系统,该系统需要主动结构控制。因此,飞行中机翼形状的估计有利于控制非常灵活的飞机。本文提出了一种基于扩展卡尔曼滤波估计柔性结构状态的新方法,该方法利用了辅助惯性导航系统中采用的思想。将不同机翼位置的高带宽率陀螺仪角速度集成在一起,以提供短期独立惯性形状估计解决方案,然后使用额外的低带宽辅助传感器来限制发散估计误差。所提出的滤波器实现不需要飞机的飞行动力学模型,简化了通常繁琐的卡尔曼滤波调整过程,并允许在机翼偏转较大和非线性的情况下进行准确估计。为了说明该方法,通过使用瞄准装置作为辅助传感器的模拟来验证该技术,并进行可观测性研究。与文献中基于立体视觉的先前研究相比,我们发现了一种传感器配置,仅使用一个摄像头和多个速率陀螺仪分别用于卡尔曼滤波更新和预测阶段,即可提供完全可观察的状态估计。

电网侧光伏分解的贝叶斯结构时间序列:预印本
摘要 —分布式光伏 (PV) 发电通常发生在“电表后面”:电网运营商只能观察到净负荷,即总负荷和分布式光伏发电的总和。这种可观测性的缺乏对系统在总体层面和分布层面的运行都构成了挑战。缺乏对总负荷和光伏发电的实时或近期分解估计将导致能源生产和监管储备的过度调度、可靠性约束违规、控制器设备磨损以及系统的潜在连锁故障。在本文中,我们建议使用贝叶斯结构时间序列 (BSTS) 模型和本地太阳辐照度测量来分解下游测量站点的总光伏发电和总负荷信号。BSTS 是一种高度表达的模型类,它将经典的时间序列模型与强大的贝叶斯状态空间估计框架相结合。分解是概率完成的,这会自动量化估计的光伏发电和总负荷消耗的不确定性。根据实时数据可用性,它可用于分解客户站点的光伏和总负载,或可用于馈线级别。在本文中,我们专注于解决馈线级别的问题。我们使用国家太阳辐射数据库 (NSRDB) 来估计局部辐照度,比较了 BSTS 模型以及 Pecan Street AMI 数据集上一些最先进的方法的性能。

基于扩展最小作用量原理和真空涨落信息度量的量子力学
摘要 我们证明了非相对论量子力学的公式可以从一个扩展的最小作用量原理中推导出来。这个原理可以看作是经典力学最小作用量原理的扩展,因为它考虑了两个假设。首先,普朗克常数定义了一个物理系统在其动力学过程中为可观测所需表现出的最小作用量。其次,沿经典轨迹存在恒定的真空涨落。我们引入了一种新方法来定义信息度量来测量由于真空涨落引起的额外可观测性,然后通过第一个假设将其转换为额外作用量。应用变分原理来最小化总作用量使我们能够恢复位置表象中的基本量子公式,包括不确定性关系和薛定谔方程。在动量表象中,可以应用同样的方法得到自由粒子的薛定谔方程,而对于具有外部势的粒子仍需要进一步研究。此外,该原理在两个方面带来了新的结果。在概念层面,我们发现真空涨落的信息度量是玻姆量子势的起源。尽管二分系统的玻姆势不可分,但底层的真空涨落是局部的。因此,玻姆势的不可分性并不能证明两个子系统之间存在非局部因果关系。在数学层面,使用更一般的相对熵定义量化真空涨落的信息度量会得到一个取决于相对熵阶数的广义薛定谔方程。扩展的最小作用原理是一种新的数学工具。它可以应用于推导其他量子形式,例如量子标量场论。
安全与防御 欧洲
“ALS” 也为未来的设计带来了新的和扩展的功能。例如,有源频率选择表面材料 (AFSS) 由一层非常薄的半导体组成,该半导体层足够灵活,可以应用于飞机外壳。AFSS 将记录和识别传入的雷达信号,并发送定制的回复,使原始信号无效。其他形式的主动涂层甚至可以抑制或“隐藏”红外和光学特征。目前,亚音速飞翼被认为是隐形飞机的最佳形式。这种设计能够实现的功能显然非常适合远程战略轰炸机的角色。美国空军似乎对 B-2 SPIRIT 非常满意,以至于选择了类似的设计,即 B-21 RAIDER,作为其继任者。战斗机或战斗轰炸机则不然。因此,F-22 和 F-35 与其前身 F-15 和 F-16 的相似性要高于 B-2 与 B-52 的相似性。尽管第五代战斗机和战斗轰炸机的设计似乎为了更好的灵活性而牺牲了隐身性,但 F-22 和 F-35 都因无法在视距空对空作战中击败第四代对手而受到批评。不管这种说法有多合理,它仍然表明高气动性能和极低的可观测性是相互竞争的设计原则。当避免早期雷达探测比高敏捷性更重要时,隐形战斗机处于最佳状态,即在超视距空对空作战或穿透复杂的综合防空系统时。战斗机和战斗轰炸机所需的高敏捷性也意味着它们的整体尺寸必须相对较小。非隐形设计通过将大部分燃料和武器作为外部存储来弥补这一点。但是,外部存储和隐形是不相容的。为了实现隐身,飞机必须在内部携带燃料和武器,这会减少它们的航程,并减少一次出击可以击中的目标数量。这只能通过改变空中作战的总体性质和组成来改善。使用“武库飞机”增加可用武器的数量,使用加油机扩大射程和续航能力,将提供一些解决方案,但如果这些飞机的隐身性不如它们所支持的飞机,也会带来新的挑战。目前的想法似乎集中在使用隐形飞机作为一种“先锋”,突破对手的防御,并利用其传感器和网络能力来发现、识别和

分布式融合算法用于...被动定位
本文研究了使用无线传感器网络 (WSN) 进行多个瞬态发射器 (目标) 定位的问题。一个特定的应用是利用安装在士兵组上的声学枪声检测系统网络来定位战场上的对手 [16][17]。假设目标在感兴趣的时间窗口内是静止的,但目标数量未知。传感器可以通过检测目标发射的声学信号来测量目标的视线 (LOS) 角,并记录检测到的信号的到达时间 (TOA)。这意味着任何单个传感器的目标位置可观测性都不完整。由于传感器的不完善,存在漏检和误报。此外,测量结果与目标之间的关联是未知的,也就是说,每个传感器都不知道特定测量结果来自哪个目标(或杂波)。在估计任何目标的位置之前,必须关联所有传感器的测量结果。因此,数据关联的质量对整体定位性能至关重要。我们之前的工作 [13] 中开发的两种不同的融合算法使用集中式方法解决了这个问题,即我们假设有一个融合中心直接或通过多跳中继(通常通过无线通信)从各个传感器收集所有信息。集中访问所有信息可能很困难。例如,在覆盖大面积的应用中,需要高传输功率才能将信息从单个传感器直接传送到融合中心。此外,基于融合中心的方法不够稳健,也就是说,如果融合中心发生故障,整个系统都会发生故障。这促使人们开展大量关于分布式融合或分布式优化算法的研究,包括本文中提出的算法。一种直接的分布式解决方案是泛洪,即通过网络中的链路广播实际的传感器测量值。在 [7] 中,提出了一种广播新测量值的通信策略,以允许分布式测量融合,对于线性动态系统,在给定所有接收到的测量值的情况下,在每个节点产生最佳估计。对于本文考虑的定位问题,有一个非线性静态系统。该方法需要大量的数据通信、存储内存和簿记开销。泛洪方法仍然适用,通过仔细记账和多次迭代信息交换,每个传感器将拥有所有信息,并可以充当融合中心,以找到与集中式方法相同的全局解决方案。例如,它需要大约 S(传感器数量)乘以基于平均共识(AC)的方法的内存存储。

安吉尔·米诺蒂
专业经验 国际项目 2018 年 3 月 8 日 – 2022 年 3 月 7 日 EU-P2P 两用产品计划:“提供战略贸易管制相关活动专业知识的框架合同”,EU-P2P 出口管制计划,研究员。科学联盟:列日大学、伦敦国王学院、斯德哥尔摩国际和平研究所 (SIPRI)、海关与国际贸易法研究所 (AWA)、肯特大学 (UoK) 和 Angelo Minotti。 2017 年 5 月 31 日 – 2018 年 5 月 30 日 EU-P2P 两用产品计划:“EUP2P 两用产品出口管制计划范围内的短期专家”。Expertise France,咨询服务。 2017 年 1 月 12 日 EU-H2020 居里夫人,SMETCUB(用于 CUBesat 推进系统的旋流微燃烧室和电催化技术)。评估 84.8/100;阈值 70/100;资金 85/100。2012 年 3 月 1 日 – 2016 年 7 月 31 日欧盟第七框架计划 - HRC 研究项目:“用于连续和灵活发电的混合可再生能源转换器”,研究员。罗马大学,航空航天和机械工程系,宇航、电气和能源学系。2010 年 10 月 1 日 – 2012 年 11 月 30 日欧盟第七框架计划 - ISP-1 研究项目:“空间推进-1:CH4/氧气燃烧研究”,研究员。罗马大学,航空航天和机械工程系 2007 年 6 月 1 日 - 2007 年 11 月 1 日欧盟第六框架计划 - LAPCAT 研究项目:“冲击边界层相互作用的大涡模拟”,研究员。罗马大学,航空航天和机械工程系 2005 年 1 月 1 日 – 2006 年 12 月 31 日 ESAFLPP(未来发射器准备计划)研究项目:“未来可重复使用发射器的 LO2/CH4 火箭发动机的亚临界和超临界燃烧建模”,研究员。罗马大学,航空航天和机械工程系 – AVIO SpA 2004 年 1 月 1 日 – 2004 年 12 月 31 日 北约“低可观测性”研究项目:“使用 NATO Nplume、Modtran 和 Niratam 软件对涡轮喷气发动机羽流进行红外(3.5-5μm 和 8-12μm)分析和可见性”,研究员。罗马大学,航空航天和机械工程系 - Avio SpA 2003 年 5 月 1 日 - 2003 年 12 月 31 日 ESA“Vega”研究项目:“羽流辐射分析:VEGA 运载火箭的 SRM 和 AVUM ME”,研究员。

用于对神经系统进行最优控制建模的计算机框架 Rückauer, BJ; Gerven, MAJ van 2023,文章 / 致编辑的信 (Frontiers i
我们提出了一个控制理论框架来研究嵌入在模拟环境中的生物驱动人工神经系统(Sussillo,2014)的稳定性和可控性。从高层的角度来看,这个框架模拟了脑-机-环境的相互作用。我们首先考虑建模一个神经系统在虚拟环境中执行行为任务的问题。用控制理论的语言来说,神经系统与环境过程形成一个闭环反馈控制器。在第二步中,我们模拟神经系统的退化(例如在传感器或执行器处)并添加一个二级控制器(假肢),目的是恢复行为功能。在此过程中,我们考虑了大脑模型中的不确定性、非线性、测量噪声以及可观察状态和可控神经元的有限可用性。神经系统,从单个神经元到大规模群体,都以复杂的动态为特征,建模和控制可能具有挑战性(Ritt and Ching,2015)。经典控制理论(Khalil,2002;Brunton 和 Kutz,2017;Astrom 和 Murray,2020)为设计控制律提供了强大的工具,并在神经技术领域得到广泛应用,例如机械臂或计算机光标的闭环脑机接口 (BMI) 控制(Shanechi 等人,2016)、癫痫发作缓解的模型预测控制(Chatterjee 等人,2020)以及大脑在认知状态之间转换的机制解释(Gu 等人,2015)。闭环控制的一个特别成功的应用是通过深部脑刺激治疗帕金森病。在那里,可以使用基于阈值、比例积分或自调节控制器将病理性 β 波段振荡活动抑制在所需的目标水平(Fleming 等人,2020a、b)。 Schiffi (2011) 建立了一种将控制理论与神经科学和生物医学联系起来的典型方法,其中时空皮质动态模型与卡尔曼滤波器相结合,以估计未观察的状态并跟踪未知或漂移的模型参数。神经形态社区中的团队最近通过实现生物学上合理的操作和学习状态估计和控制规则(Friedrich 等人,2021;Linares-Barranco 等人,2022)以及神经形态 BMI 电路(Donati 和 Indiveri,2023)为这项工作做出了贡献,这有望在低功耗运行时实现更好的生物相容性。在上述许多方法中反复出现的一些挑战是线性(可实现)或低维系统的假设、对底层动态的知识或所需目标状态的可用性(如帕金森病的 DBS)。本文针对这些局限性做出了两项主要贡献。首先,我们建议一致使用动力系统来模拟大脑、环境、和假肢。除了统一方法论之外,这种选择还可以灵活地对不同程度的真实模型进行实验。在这里,我们展示了循环神经网络 (RNN) 作为神经系统和假肢的简单、高度可扩展的构建块的使用。其次,我们逐步消除了线性、系统知识、完全可观测性和监督目标状态的假设,通过使用强化学习 (RL)(Sutton 和 Barto,2020 年)进行系统识别和合成假肢控制器。
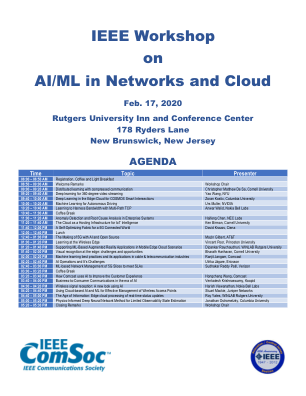
IEEE 网络和云中的 AI/ML 研讨会
时间 主题 演讲者 08:00 – 08:50 AM 注册、咖啡和简便早餐 08:50 – 09:00 AM 欢迎致辞 研讨会主席 09:00 – 09:20 AM 压缩通信下的分布式学习 Christopher Matthew De Sa,康奈尔大学 09:20 – 09:40 AM 360 度视频流的深度学习 Yao Wang,纽约大学 09:40 – 10:00 AM COSMOS 智能交叉路口的边缘云深度学习 Zoran Kostic,哥伦比亚大学 10:00 – 10:20 AM 自动驾驶的机器学习 Urs Muller,NVIDIA 10:20 – 10:40 AM 学习利用多路径 TCP 控制带宽 Anwar Walid,诺基亚贝尔实验室 10:40 – 11:00 AM 咖啡休息 11:00 – 11:20 AM企业系统中的原因分析 Haifeng Chen,NEC 实验室 11:20 – 11:40 AM 云作为 IoT 智能的托管基础设施 Ken Birman,康奈尔大学 11:40 – 12:00 PM 5G 互联世界的自优化结构 David Krauss,Ciena 12:00 – 12:40 PM 午餐 12:40 – 01:00 PM 利用人工智能和开源打造 5G Mazin Gilbert,AT&T 01:00 – 01:20 PM 无线边缘的学习 Vincent Poor,普林斯顿大学 01:20 – 01:40 PM 在移动边缘云场景中支持基于 ML 的增强现实应用程序 Dipankar Raychaudhuri,WINLAB 罗格斯大学 01:40 – 02:00 PM 边缘的视觉识别:挑战与机遇 Bharath Hariharan,康奈尔大学02:00 – 02:20 PM 机器学习最佳实践及其在有线电视和电信行业中的应用 Ranjit Jangam,康卡斯特 02:20 – 02:40 PM 人工智能运营及其挑战 Ulrika Jägare,爱立信 02:40 – 03:00 PM 基于机器学习的 5G 切片网络管理以满足 SLA Sudhakar Reddy Patil,威瑞森 03:00 – 03:20 PM 咖啡休息 03:20 – 03:40 PM 康卡斯特如何利用人工智能改善客户体验 Hongcheng Wang,康卡斯特 03:40 – 04:00 PM 人工智能时代的企业对消费者通信 Venkatesh Krishnaswamy,Koopid 04:00 – 04:20 PM 无线信号接收:利用人工智能的新面貌 Harish Viswanathan,诺基亚贝尔实验室 04:20 – 04:40 PM 使用基于云的 AI 和 ML 有效管理无线接入点 Stuart Mackie,瞻博网络 04:40 – 05:00 PM 信息时代:实时状态更新的边缘云处理 Roy Yates,WINLAB 罗格斯大学 05:00 – 05:20 PM 用于有限可观测性状态估计的物理信息深度神经网络方法 Jonathan Ostrometzky,哥伦比亚大学 05:20 – 05:30 PM 闭幕词 研讨会主席

质疑人工智能预测:影响力驱动的第二意见推荐
[1] Gagan Bansal、Besmira Nushi、Ece Kamar、Dan Weld、Walter Lasecki 和 Eric Horvitz。2019 年。人机协作团队向后兼容的案例。ICML 人机协作学习研讨会 (2019)。[2] Gagan Bansal、Tongshuang Wu、Joyce Zhou、Raymond Fok、Besmira Nushi、Ece Kamar、Marco Tulio Ribeiro 和 Daniel Weld。2021 年。整体是否超过部分?人工智能解释对互补团队绩效的影响。在 CHI 计算机系统人为因素会议论文集上。1-16。 [3] Umang Bhatt、Javier Antorán、Yunfeng Zhang、Q Vera Liao、Prasanna Sattigeri、Riccardo Fogliato、Gabrielle Gauthier Melançon、Ranganath Krishnan、Jason Stanley、Omesh Tickoo 等人。2020 年。不确定性作为透明度的一种形式:测量、传达和使用不确定性。arXiv 预印本 arXiv:2011.07586 (2020)。[4] Zana Buçinca、Maja Barbara Malaya 和 Krzysztof Z Gajos。2021 年。信任还是思考:认知强制函数可以减少人工智能辅助决策对人工智能的过度依赖。ACM 人机交互论文集 5,CSCW1 (2021),1-21。 [5] Rich Caruana、Yin Lou、Johannes Gehrke、Paul Koch、Marc Sturm 和 Noemie Elhadad。2015 年。医疗保健的可理解模型:预测肺炎风险和 30 天内住院率。第 21 届 ACM SIGKDD 国际知识发现和数据挖掘会议论文集。1721–1730。[6] R Dennis Cook。1986 年。局部影响力评估。皇家统计学会杂志:B 系列(方法论)48,2(1986 年),133–155。[7] Maria De-Arteaga、Artur Dubrawski 和 Alexandra Chouldechova。2021 年。利用专家一致性改进算法决策支持。arXiv 预印本 arXiv:2101.09648(2021 年)。 [8] Maria De-Arteaga、Riccardo Fogliato 和 Alexandra Chouldechova。2020 年。《人机交互案例:在存在错误算法评分的情况下做出决策》。2020 年 CHI 计算机系统人为因素会议论文集。1-12。[9] Berkeley J Dietvorst、Joseph P Simmons 和 Cade Massey。2015 年。《算法厌恶:人们在发现算法错误后会错误地避开算法》。《实验心理学杂志:综合》144, 1 (2015),114。[10] Kelwin Fernandes、Jaime S Cardoso 和 Jessica Fernandes。2017 年。《具有部分可观测性的迁移学习应用于宫颈癌筛查》。《伊比利亚模式识别与图像分析会议》。Springer,243-250。 [11] Yarin Gal 和 Zoubin Ghahramani。2016 年。Dropout 作为贝叶斯近似:表示深度学习中的模型不确定性。在国际机器学习会议 (ICML) 中。1050–1059。[12] Ruijiang Gao、Maytal Saar-Tsechansky、Maria De-Arteaga、Ligong Han、Min Kyung Lee 和 Matthew Lease。2021 年。通过 Bandit 反馈实现人机协作。IJCAI (2021)。[13] Pang Wei Koh 和 Percy Liang。2017 年。通过影响函数理解黑盒预测。在第 34 届国际机器学习会议论文集-第 70 卷中。JMLR。org,1885–1894 年。[14] Himabindu Lakkaraju、Jon Kleinberg、Jure Leskovec、Jens Ludwig 和 Sendhil Mullainathan。2017 年。选择性标签问题:在存在不可观测因素的情况下评估算法预测。第 23 届 ACM SIGKDD 国际知识发现与数据挖掘会议论文集。ACM,275–284。

斯坦丘,米哈伊
电子、电信和信息技术学院,电信系 作品清单 Stanciu Mihai 1 0 博士论文 T1,M. Stanciu,关于确保异构多域网络中服务质量的方法的贡献,2006 2 0 出版书籍(Ca、Cb、Cc)、发布指南(I1、I2 等)、在合集里发表的章节、编辑过的理论章节、功能实验室系统等。 (D1、D2 等),为提供和改进教学/专业活动做出贡献。 Ca1、M. Stanciu、电子测量仪器、ISBN 978-973-7860-15-6,Editura Electronica 2000,136 页,2009 Ca2、R. Stănculescu、M. Stanciu、电气和电子测量,第 1 部分,UPB 光刻,120 页,1998 I1、M. Stanciu、S. Obreja、A. Paun、电子和电信测量、实验室手册、Editura Electronica 2000、ISBN 978-973-7860-09-5、80 页,2008 I2、M. Stanciu、S. Obreja、A. Paun、M. Udrea、I. Marcu、R. Preda、I. Pirnog、电子测量仪器、实验室手册、Editura Electronica 2000 年,ISBN 978-973-7860-10-1,97 页,2008 I3,- A. Paun、S. Obreja、M. Stanciu,电子测量仪器 – 应用,Electronica Publishing House 2000 年,ISBN 978-973-7860-13-2,130 页,2008 I4,M. Stanciu,电信网络 – 实验室手册,Electronica Publishing House 2000,79 页,2008 I5,Coţanis N.、Stănculescu R.、Ciochina S.、Iliescu I.、Lascu C.、Stanciu M.,电气和电子测量(实验室手册),布加勒斯特理工大学,1997 3 0 发表的文章/研究:a) 在公认的国际专业期刊、ISI 列出的或被收录到该领域特定的国际数据库中,该数据库根据绩效标准 (Ris) 进行期刊的选择过程; b) 在其他具有国际发行量的专业期刊上(里约); c) 在CNCSIS认可的国家期刊上(Rns); d) 在其他全国发行的专业杂志上(Rno); b、c、d 包括在公认的国际数据库中索引。 O. Datcu、M. Stanciu,“混沌“Jounce”密码系统的可观测性特性和统计分析”,UPB Sci。 Bull.,C 系列,卷78,页106-117,页3,2016,ISSN 2286-3540,WOS:000393326700010(ISI)O. Datcu,M. Stanciu,“从高阶滑模观测器观察到的混沌同步信号形状改变”,Rev.技术。英语。大学苏利亚。体积39,第1号,18-25,0254-0770,2016 O. Datcu、M. Stanciu、A. Petrescu-Niță,“基于观察者的具有指数非线性混沌动力学估计”,UPB Sci。 Bull.,A 系列,卷77,伊斯4,2015,ISSN 1223-7027,页205-214。 ( ISI 索引) O. Datcu、M. Stanciu、R. Tauleigne、C. Burileanu、J.-P. Barbot,“数据保密通信中用作发射机的混沌抖动电路的输出选择”,电气和计算机工程进展 (AECE);第 4 期,2015 年,ISSN:1582-7445,e-ISSN:1844-7600,数字对象标识符:10.4316/AECE.2015.04008;第 63-68 页。ISI O. Datcu、M. Stanciu,“从高阶滑模观测器看混沌同步信号形状改变”,Revista Tecnica De La Facultad De Ingenieria Universidad Del Zulia,第 39 卷,第 1 期,2016 年;第 18-25 页,ISI