XiaoMi-AI文件搜索系统
World File Search System图像特征

正电子发射断层扫描中的人工智能
智能手机、智能家居、智能导航等都是人工智能(AI)在日常生活中的重要应用。人工智能最早出现于20世纪50年代,随着对它的认识和重新定义,人工智能逐渐被提出。目前,人工智能被定义为研究和开发用于模拟、扩展和增强人类智能的理论、方法、技术和应用系统的一门新技术科学(1)。我们目睹了人工智能的快速发展,其在医疗保健,特别是医学图像处理和分析方面的研究和应用方兴未艾。与更易于获取且采集过程更容易标准化的计算机断层扫描(CT)和磁共振成像(MRI)相比,正电子发射断层扫描(PET)更昂贵、获取范围更广,其更复杂的技术操作过程给标准化图像采集带来了困难。虽然AI在PET领域的研究和应用进展相对较慢,但由于PET作为分子影像的重要领域,AI在PET成像领域的应用正受到广泛的关注,成为研究热点。在技术层面,针对不同厂家、不同仪器型号、不同成像技术的PET扫描仪在成像过程中参数和质量的差异性,开展了图像后处理研究,包括图像标准化、归一化、小波变换、高斯变换、特征预处理等。AI赋能的分割技术进一步提高了AI特征的稳定性和AI研究的可重复性(2、3)。为了满足临床应用的需求,通过深入挖掘图像特征,结合人群和临床证据,构建机器学习模型,PET 中的 AI 已被开发用于病变检测和边界描绘、诊断和鉴别诊断、风险预测和预后评估,甚至预测临床基因或分子分型( 1 , 4 – 7 )。本研究主题包括 11 篇出版物,强调了 AI 如何支持 PET 图像处理和分析。最近,许多研究小组一直致力于将 AI 用于 PET 图像解释,例如病变检测。Kawakami 等人应用对象深度学习 (DL) 检测模型 You Only Look Once Version 2 (YOLOv2) 来检测 18 F-FDG PET 中的生理和异常摄取。)。)。结果表明,MIP 图像上的生理摄取被快速准确地识别(Kawakami 等人。YOLOv2 检测到的异常摄取与手动识别的覆盖率较高(Kawakami 等人。精确的检测和快速的反应将成为疾病诊断的有用工具。最大标准化摄取值 (SUVmax) 是解释图像和评估的最常用参数
基于人工智能的自动评分及培训系统在糖尿病视网膜病变人工检测教育中的有效性
糖尿病视网膜病变 (DR) 是全球劳动年龄人口失明和视力障碍的主要原因 (1)。大量研究表明,及早发现和及时治疗 DR 可以防止 90% 以上的糖尿病患者出现严重的视力丧失 (2,3)。然而,由于视网膜专家严重短缺,欠发达国家很大一部分患者无法接受协议推荐的年度眼科检查 (4,5)。面对全球糖尿病发病率的快速上升 (6),迫切需要一种新的糖尿病管理方法。已经证实,在接受眼底照相阅读培训后,非眼科医生在发现 DR 方面与眼科医生一样高度敏感 (7)。对非眼科阅读人员的培训似乎是他们融入糖尿病眼部筛查的重要一步。准确的 DR 临床分期是选择最合适的个性化治疗的先决条件。基于彩色眼底照相的早期治疗糖尿病视网膜病变研究 (ETDRS) 目前已成为 DR 分级的金标准 (8)。尽管如此,由于实际病例的个体差异,图像识别的训练过程具有很大的实施复杂性。为了获得在日常临床实践中确立诊断的技能,受训人员需要从大量的图像中学习以提取图像特征。但由于资源、人员和资金的限制,培训机会可能会被压缩 (9)。此外,即使是高素质的教师也可能存在主观性,并且在读者内部和读者之间的诊断方面也存在差异 (10)。传统的眼科学课程通常无法提供大量标准化案例用于培训。近年来,人工智能 (AI) 在主要眼部疾病的诊断和预测方面表现出明显优势,特别是那些涉及图像分析的疾病 (11-13)。使用人工智能的自动视网膜图像筛查系统的最新进展表明,在 DR 评估中可以达到专家级别的准确度(10、14)。大数据和人工智能技术在教育环境中的实施也显示出提高教学效率的巨大潜力(15)。从大数据中提取的重要信息有助于缩短培训时间并改善学生的学习曲线。然而,人工智能作为考试系统和/或机器人教师为医学生和受训人员提供个性化教育的潜力需要进一步评估。在本研究中,我们开发了一种基于人工智能的自动 DR 评分系统,配备了人工智能驱动的诊断算法,并验证了其作为培训非眼科医生进行 DR 人工评分的教学和学习工具的作用。

使用 MRI 肿瘤纹理预测前庭神经鞘瘤放射外科治疗后暂时性肿瘤增大
目的:前庭神经鞘瘤 (VS) 是一种罕见的良性脑肿瘤,通常采用伽玛刀放射外科 (GKRS) 治疗。然而,由于暂时性肿瘤增大 (TTE) 可能产生的不良影响,大型 VS 肿瘤通常通过手术切除而不是放射外科治疗。由于显微外科手术具有高度侵入性并且会显著增加并发症的风险,因此通常首选 GKRS。因此,预测大型 VS 肿瘤的 TTE 可以改善整体 VS 治疗,并使医生能够根据个体情况选择最优治疗策略。目前,尚无已知的临床因素可以预测 TTE。在本研究中,我们旨在使用从 MRI 扫描中提取的纹理特征来预测 GKRS 后的 TTE。方法:我们分析了在我们伽玛刀中心接受治疗的 VS 患者的临床数据。数据是前瞻性收集的,包括患者和治疗相关特征以及治疗当天和治疗后 6、12、24 和 36 个月的随访中获得的 MRI 扫描。使用统计检验研究了患者和治疗相关特征与 TTE 的相关性。从治疗扫描中,我们提取了以下 MRI 图像特征:一阶统计数据、Minkowski 函数 (MF) 和三维灰度共生矩阵 (GLCM)。这些特征被应用于机器学习环境中,用于使用支持向量机对 TTE 进行分类。结果:在包含 61 名明显非 TTE 患者和 38 名明显 TTE 患者的临床数据集中,我们确定患者和治疗相关特征与 TTE 没有任何相关性。此外,使用支持向量机分类,一阶统计 MRI 特征和 MF 没有显著显示预后价值。然而,利用一组 4 个 GLCM 特征,我们实现了 0.82 的敏感性和 0.69 的特异性,显示了它们对 TTE 的预后价值。此外,这些结果对于较大的肿瘤体积有所增加,对于大于 6 cm 3 的肿瘤,获得了 0.77 的敏感性和 0.89 的特异性。结论:本研究的结果清楚地表明,MRI 肿瘤纹理提供了可用于预测 TTE 的信息。这可以作为选择个体 VS 治疗的基础,进一步改善整体治疗结果。特别是对于 VS 较大的患者,TTE 现象最为相关,我们的预测模型表现最佳,这些发现可以在临床工作流程中实施,从而可以为每位患者确定最优的治疗策略。© 2020 作者。医学物理学由威利期刊公司代表美国医学物理学家协会出版。 [https://doi.org/10.1002/mp.14042]
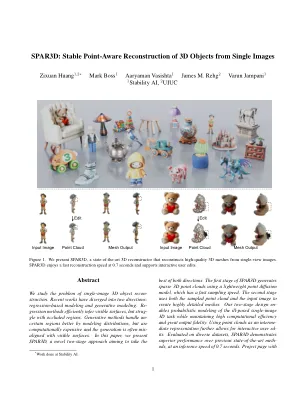
SPAR3D:从单幅图像实现稳定的点感知三维物体重建
从单目图像重建3D物体是计算机视觉领域的一个基本问题。高效的重建系统能够开辟广泛的应用领域,包括增强现实、电影制作和制造业。单目3D重建也是一个复杂的逆问题:虽然可见表面可以通过阴影估计,但预测遮挡表面需要强大的3D物体先验知识。我们的领域已经在两个不同的方向上出现了分歧:前馈回归[2、10、19、24、25、27、37、53、54、59-62、65、66、69]和基于扩散的生成[6、8、9、26、29、31-35、39、46-48、68、71]。尽管在两个方向上都取得了重大进展,但每个方向都有根本的局限性。基于回归的模型在粘附图像中的可见表面方面非常有效,并且推理速度通常很快。然而,它们对图像和 3D 之间的双射映射做出了过于简单的假设。这一假设在学习目标中引入了模糊性,导致遮挡区域的表面和纹理估计不佳。另一方面,基于扩散的方法是生成性的,不能预测统计平均值。然而,在建模高分辨率 3D 时,它们在推理时的迭代采样计算效率低下。此外,[27] 等先前的研究表明,扩散生成的 3D 模型与输入图像中可见表面的对齐效果较差。我们如何才能兼顾两者的优点而又避免它们的局限性?有鉴于此,我们提出了 SPAR3D,它将 3D 重建过程分为两个阶段:点采样阶段和网格划分阶段。点采样阶段使用扩散模型生成稀疏点云,然后是网格划分阶段,将点云转换为高度详细的网格。我们的主要思想是将不确定性建模转移到点采样阶段,在此阶段,点云的低分辨率允许快速迭代采样。随后的网格划分阶段利用局部图像特征将点云转换为具有高输出保真度的详细网格。减少点云网格划分的不确定性进一步促进了逆渲染的无监督学习,从而减少了纹理中的烘焙照明。我们的两阶段设计使 SPAR3D 的性能显著优于以前的回归方法,同时保持了高计算效率和对输入观测的保真度。我们方法的一个关键设计选择是使用点云来连接两个阶段。为了确保快速重建,我们的中间表示需要轻量级,以便能够高效生成。另一方面,它应该为网格划分阶段提供足够的指导。这

病理学家很快就会被机器人取代吗?
技术的不断进步对工人产生了令人担忧的影响,无论从事何种职业。在某些工厂中,机器人数量是工人数量的 14 倍 (1) ,机器人自动化机器作为更优越的替代品进入工作领域已不再是科幻小说中的命题。这是一个显而易见的现实,而且发展如此迅速,以至于英国国家统计局 (ONS) 提供了一种工具,允许工人计算他们被取代的个人风险 (2) 。某些工作似乎不可避免地会因技术创新而消失,这让病理学家的处境岌岌可危;根据 ONS 的数据,医生被取代的风险最低,这是否能为抵御技术浪潮提供必要的保护?病理学决策的细微差别是否是机器无法实现的?或者,所涉及的过程是否有助于自动化,也许是为了改善患者护理?病理学在历史上的可塑性往往反映出人们愿意接受医学创新 (3)(4) 。自从组织病理学家因显微镜而出现以来,随着人类的进步,亚专科和新方法也应运而生 (4)。最近,数字病理学技术的采用大大简化了工作流程 (5)。不断提高临床准确性和效率的愿望推动了这种现代化。正如外科医生得到了机器人助手的帮助而不是被取代一样 (6)(7),无能为力的良性机器人“工具”的发展在逻辑上不会对病理学家的未来构成威胁。病理学家的角色将在技术的操作和解释中受到保护。如果人工智能 (AI)(约翰·麦卡锡博士将其定义为“制造智能机器的科学和工程”) (8) 为机器提供决策权,病理学家的角色将变得不那么明确。人工智能取代病理学家可能具有成本效益,通过节省病理学家的培训和工资来抵消设计和生产成本。多任务处理能力也具有明显的节省时间的能力。从历史上看,人工智能技术在自我完善和重新解释世界观方面根本无法与人类大脑相匹敌 (9) 。最近的技术发展弥补了这一差距,预示着人工智能改进诊断决策的额外考虑。人工神经网络受到大脑神经元互连的影响,已被证明对于能够学习和匹配临床专业知识的人工智能系统的发展至关重要 (10) 。Yamamoto 等人在解释未注释的组织病理学图像时试用现代人工智能技术的研究揭示了它的前景,同时也为病理学家指明了不确定的未来 (11) 。深度学习算法使机器学习成为可能,准确识别关键图像特征,获得与人类相同精度的可解释知识。值得注意的是,人工智能破译了以前未被识别的特征,提供比人类建立的格里森评分更准确的预后指征。由于该算法不需要持续的人为输入,并能识别病理学家无法识别的特征,其作为可行替代方案的潜力显而易见。然而,正如 Misbah 等人简洁地描述的那样,病理学家不仅限于诊断评估 (3) 。实验室的方向、提供临床见解、确保高标准和直接协调患者护理只是日常考虑的一小部分。这些流程对于提供实验室主导的服务至关重要,似乎与自动化不太兼容。

iQuest 临床验证工作 - Avenda Health
Avenda Health 的 iQuest 软件是一种基于人工智能 (AI) 的决策支持工具,可与医学成像和活检数据结合使用来规划前列腺癌干预措施。iQuest 通过帮助用户分割 MRI 图像特征、以 3D 形式可视化癌症风险以及选择治疗部位来支持前列腺肿瘤学工作流程。迄今为止,各种临床数据回顾性研究已用于验证 iQuest 功能,包括多份同行评审的摘要和几份正在准备中的手稿。这些验证工作总结如下。AI 前列腺分割算法 (AIPSA) Avenda Health 开发了一种基于 MRI 图像自动分割前列腺的 AI 算法,并在 137 个多机构测试案例上验证了该算法。该算法在广泛的前列腺体积、扫描仪型号和图像分辨率中均表现出色,平均骰子相似系数为 0.93。此外,在与竞争产品(In Vivo DynaCAD)的前列腺分割功能进行头对头比较时,Avenda 算法表现最佳,骰子相似度(0.93 vs 0.86)和相对体积误差(4.9% vs 15.2%)均有显著改善。AI 病变轮廓算法 Avenda Health 开发了一种 AI 算法,帮助用户定义病变轮廓,以便在前列腺干预(如靶向治疗)期间使用。该算法的核心特征是癌症估计图(CEM),即整个前列腺估计的临床显著癌症(csPCa)风险的 3D 图。CEM 是使用多机构融合活检数据开发的,并在 100 例多机构前列腺切除术病例中进行了验证 [1]。事实证明,CEM 在预测 csPCa 方面非常有效,平均 AUC 为 0.92,平衡准确度为 85%。此外,使用来自外部人群的 50 例前列腺切除术病例,从 CEM 得出的默认病变轮廓优于传统规划 [1]。Avenda 病变轮廓具有更高的 csPCa 敏感性和更高的指数肿瘤包封率(分别为 97% 和 90%),高于放射科医生定义的原始目标(37%,0%)、半腺边缘(94%,66%)和 1 厘米均匀边缘(93%,82%)。在同一项研究中,iQuest 的包封置信度评分功能能够准确预测 csPCa 包封率,R 2 值为 0.98,中位误差仅为 4%。Avenda LCA 验证工作已在 5 篇同行评审和获奖摘要中发表 [2-6],手稿正在准备提交期刊 [1]。病变轮廓勾画的医生研究除了内部研究确认用户与 iQuest 整体交互的准确性和有效性之外,还通过多读者(N = 10)多病例(N = 50)研究使用根治性直肠切除术标本作为基本事实来评估病变轮廓勾画任务[7-10]。使用 iQuest 的读者(医生)绘制的病变轮廓比手动定义的轮廓识别出更多的 csPCa(97% vs 38%),同时比半腺轮廓保留了更多的良性组织(72% vs 53%)。iQuest 轮廓的平衡准确度明显高于两种比较方法,阅读时间减少了 40%。手稿正在准备提交给期刊 [9]。

卷积神经网络利用 MR 波谱成像数据预测脑肿瘤等级和阿尔茨海默病
脑部疾病通常通过磁共振成像(MRI)来诊断,以识别解剖偏差,在某些情况下,通过磁共振波谱(MRS)来评估代谢异常[1,2]。磁共振波谱成像(MRSI)以覆盖大脑的二维或三维网格中体素的光谱形式提供代谢信息。MRS 可帮助确定脑部疾病的类型和严重程度,在局部或异质性病变的情况下,可将体素分为健康、非健康或疾病严重程度,例如脑肿瘤[3-12]。在通过 MRI 诊断脑部疾病时,正确的图像分割对于可视化解剖结构和识别病理区域非常重要。相反,在通过 MRSI 进行诊断时,重点更多地放在特征选择算法上,以识别代谢异常[13,14]。在大多数 MRSI 研究中,MRI 用于解剖指导,但事实已证明,将其与 MRI 信息相结合可提高诊断水平[4、10、13、15–18]。卷积神经网络(CNN)[19] 在医学图像分割方面取得了成功[20–23]。CNN 是一种人工神经网络[24],是目前图像分类的最新技术[25–27]。它们通过卷积充当特征提取器。输入与一个或多个核进行卷积,并使用新的表示来预测输入属于哪个类。因此,经过训练后,核会生成原始输入的表示,该表示更适合区分分配给不同类别的样本。最近,CNN 已应用于 MRS(I) 数据,以估算代谢物的组织浓度 [ 28 – 30 ]、提高 MRSI 的空间分辨率 [ 31 ] 以及评估 MRSI 光谱质量和过滤伪影 [ 32 , 33 ],但它们尚未用于通过 MRSI 对疾病进行分类。使用 MRSI 数据开发分类模型的一个挑战是可用的案例数量有限。MRSI 数据通常很稀缺,阻碍了使用具有许多参数需要学习的深度神经网络架构。因此,在本文中,我们研究了使用只有一个隐藏层的浅层 CNN 对 MRSI 疾病进行分类。尽管光谱和图像是不同的数据类型,但它们都以特征局部性为特征:图像在空间上是局部性,而光谱在光谱上是局部性 [ 34 ]。特征局部性意味着相邻特征的值高度相关。这些相邻特征是光谱的相邻频率和图像的附近像素。在本文中,我们基于 [ 35 ] 提出了一种 CNN 方法,利用这种特征局部性对脑体素进行分类。为了实现这一点,我们设计了一种类型融合方法,其中光谱和图像数据被联合用于训练具有单个隐藏卷积层的 CNN,该层考虑了光谱的光谱局部性和图像的空间局部性。此外,我们在损失函数中添加了一个正则化项,以惩罚权重值的较大变化,从而避免过度拟合。具体来说,我们考虑了一个具有两个输入分支的 CNN,每个分支都有一个隐藏的卷积层,以便同时处理脑体素的光谱和图像特征。每个分支都由一个隐藏的卷积层组成。这两个分支的输出是

在单元格的监督分类中优化特征提取和分类器的组合xhoena polisi duro 1,2*,arban uka 2,
在细胞的监督分类中优化特征提取和分类器的组合组合Xhoena polisi duro 1,2*,Arban UKA 2,Griselda alushllari 2,Albana Ndreu Halili 3,Dimitrios A. Karras A. Karras A. Karras 2,Nihal Engin vrana vrana 4 1 Informatics obs s. noli oblia,“ fan nori”,koria,koria,koria,korica,korica,korica,korka,korka,“ korcua”。 xpolisi@epoka.edu.al(X.P.D.)。2埃波卡大学计算机工程系,阿尔巴尼亚蒂拉纳市; auka@epoka.edu.al(a.u.)galushllari@epoka.edu.al(G.A。)dkarras@epoka.edu.al(d.a.k.)3西巴尔干大学医学系,阿尔巴尼亚提拉娜; albana.halili@wbu.edu.al(a.n.h。) 4法国斯特拉斯堡的Spartha Medical; evrana@sparthamedical.eu(N.E.V.) 摘要:医学领域的发展已经开放了在个性化患者层面进行分析的机会。 可以进行的重要分析之一是对工程材料的细胞反应,最合适的非侵入性方法是成像。 这些细胞的图像是未染色的Brightfield图像,因为在存在生物材料和流体的情况下,它们是从多参数微流体室获取的,这些室可能会随着时间的流逝而改变光路的长度,因为细胞的健康状态被监测。 这些实验条件导致具有独特照明,纹理和噪声频谱的图像数据集。 本研究通过将特征提取体系结构和机器学习分类器结合起来,探讨了监督细胞分类的优化,并重点介绍了生物材料风险评估中的应用。 1。 简介3西巴尔干大学医学系,阿尔巴尼亚提拉娜; albana.halili@wbu.edu.al(a.n.h。)4法国斯特拉斯堡的Spartha Medical; evrana@sparthamedical.eu(N.E.V.)摘要:医学领域的发展已经开放了在个性化患者层面进行分析的机会。可以进行的重要分析之一是对工程材料的细胞反应,最合适的非侵入性方法是成像。这些细胞的图像是未染色的Brightfield图像,因为在存在生物材料和流体的情况下,它们是从多参数微流体室获取的,这些室可能会随着时间的流逝而改变光路的长度,因为细胞的健康状态被监测。这些实验条件导致具有独特照明,纹理和噪声频谱的图像数据集。本研究通过将特征提取体系结构和机器学习分类器结合起来,探讨了监督细胞分类的优化,并重点介绍了生物材料风险评估中的应用。1。简介分析了三种细胞类型(A549,BALB 3T3和THP1)的Brightfield显微镜图像,以评估Inception V3,Squeeze Net和VGG16架构与分类器与包括KNN,决策树,随机森林,Adaboost,Adaboost,Neural Networks和Natan bayes的分类器配对的影响的影响。使用信息增益降低维度,以提高计算效率和准确性。使用不同参数的Butterworth过滤器用于平衡图像特征和降噪的增强,从而在某些情况下提高了分类性能。实验结果表明,与神经网络配对时,VGG16体系结构可实现通过不同指标衡量的更高分类精度。与未经过滤的数据集相比,使用Butterworth过滤器时的精度提高了,并且各种Butterworth滤波器之间的差异表明了优化这些类型图像的过滤器参数的重要性。关键字:生物材料风险评估,细胞图像分类,分类器,特征提取,个性化医学,监督分类。

引用Gao W,Shao L,Li F,Dong L,Zhang C,Deng Z,Qin P,Wei W和Ma L(2024),使用深LE
与年龄相关的白内障是世界上失明最重要的原因。根据《 2020年疾病研究的全球负担研究》的报告,2020年50岁及2000年以上的人失明的主要原因是白内障,有超过1500万例。在全球白内障引起的中度和严重视力障碍也有7880万人口[1]。白内障目前仅通过手术有效治疗。但是,由于不同领域的发展不平衡和医疗资源短缺,许多白内障患者尚未接受适当的治疗。必须提高白内障早期检测和分类的能力。基于透镜不透明度的位置有三种主要类型的白内障类型:皮质性白内障(CC),核白内障(NC)和后下囊白内障(PSC)[2]。cc是一种楔形的不透明度,它从镜头的外边缘生长到中心[3]。nc代表晶状体中央区域的渐进性不透明和晶状体核的硬化。PSC在镜头后囊中是不透明度,通常在年轻人和糖尿病患者中出现[4]。具有眼部创伤史的人更有可能患有CC和PSC [5]。研究表明,全身性和局部类固醇的使用都是发展PSC的严重危险因素[6,7]。PSC比其他两种类型的白内障的发展速度更快,并且更有可能引起视觉障碍[8]。患者也可能同时具有两种或三种类型的白内障。Xu等。Xu等。研究表明,当多一种类型的白内障一起出现时,它们会对视觉特定功能产生更大的影响。单独的PSC在NC和CC之前具有最大的影响[3]。这表明不同白内障类型的作用是加性的,在评估白内障患者的视觉特异性功能水平时应考虑[3]。基于白内障的类型和严重程度,患者执行与视觉相关的任务的能力受到不同的影响,并且手术的时间和手术方法也有所不同。因此,需要对白内障患者进行个性化评估和管理。根据这些白内障类型,已经独立引入了不同的临床白内障分类标准。镜头不相处的分类系统III和其他系统分别根据缝隙灯和重新照明图像分别评估三种不同类型的严重性[9-14]。但是,手动识别白内障类型和严重程度可能很耗时,尤其是在没有足够经验丰富的医疗能力的地方。随着白内障的情况恶化,底眼图像看起来会变得更模糊。[15]通过观察模糊程度,提出了基于眼底图像的白内障分级系统。镜头位于眼球的前部,而眼底位于后部。使用眼底摄像机用于白内障患者的视网膜成像是具有挑战性的,因为光散射可以严重降低图像质量,从而导致模糊的图像特征。例如,Yang等人。例如,Yang等人。在补充文档中引入了底面图像的成像和晶状体结构的描述。据我们所知,所有基于机器学习或深度学习的白内障研究和底底图像都集中在评估白内障严重程度上。 [16]基于从眼底图像和背部传播神经网络模型中提取的独立特征建立了合奏学习模型。据我们所知,所有基于机器学习或深度学习的白内障研究和底底图像都集中在评估白内障严重程度上。[16]基于从眼底图像和背部传播神经网络模型中提取的独立特征建立了合奏学习模型。

从运动模糊图像中识别模糊参数
点物体模糊图像的模糊程度 恢复原始图像中相对运动模糊的图像的问题。提取相机和物体场景之间的运动模糊程度对于大量应用中的运动模糊识别具有重要意义。这里提出的解决方案是PSF。Cannon [1] 处理了均匀线性的情况,确定了表征运动模糊的重要参数,该参数由方脉冲PSF和模糊的点扩展函数(PSF)描述,仅给出模糊在谱域图像本身中利用其周期性零点的性质。这种识别方法基于模糊图像的概念。这些零点被强调,因为沿运动方向的图像特征是倒谱域的,并且模糊程度的估计不同于其他方向的特征。取决于测量零点之间的间隔。关于 PSF 形状、谱域中零点的均匀性和平滑性的假设不满足,模糊图像在运动方向上的零点间距大于在其他方向上的零点间距。此外,在这个方向上存在各种运动退化的情况,例如加速原始未模糊运动 [2, 3] 和低频振动 [4]。物体。通过过滤模糊图像,我们强调 PSF 特性,而忽略图像特性。这里提出的是最大似然图像和模糊识别方法 [5–7]。这些方法对原始图像、模糊的PSF进行建模,并评估其形状,这取决于模糊和噪声过程。原始图像被修改为二维自回归(AR)过程,PSF参数允许快速高分辨率恢复模糊图像。 1997 Academic Press 具有有限脉冲响应。最大似然估计用于识别图像和模糊参数。模糊模型参数的识别被纳入恢复算法并重新进行模糊图像的恢复。介绍 模糊模型参数的识别被纳入恢复算法并重新进行模糊图像的恢复。介绍 模糊模型参数的识别被纳入恢复算法并重新进行模糊图像的恢复。1.介绍 模糊模型参数的识别被纳入恢复算法并重新进行模糊图像的恢复。成像系统的一个难题是性能下降需要大量计算。由运动引起的图像。当 Savakis 和 Trussell [8] 提出另一种模糊识别方法时,这个问题很常见。使用对原始图像平面的估计,即使相机由人手握住。功率谱(期望值),PSF 估计为 ,通常基于有关恢复残差功率和退化过程之间最佳匹配的信息的准确性。给定理想图像 f (x, y),相应的候选 PSF 与真实 PSF 相似。分级图像 g (x, y) 通常建模为 在本文中,我们开发了一种从运动模糊图像本身识别模糊参数的新方法。g ( x , y ) � � � h ( x � x � , y � y � ) f ( x � , y � ) dx � dy � � n ( x , y ) 根据对运动模糊对图像影响的研究,从模糊图像中提取方向、程度 (1) 和形状估计等模糊特征。虽然模糊识别的动机通常是其中 h ( x , y ) 是线性平移不变 PSF(点扩散图像恢复,这里提出的方法不起作用)和 n ( x , y ) 是随机噪声。将识别过程与恢复过程联系起来。在运动模糊图像中,模糊程度参数是该方法解决一维模糊类型,这在运动退化的情况下很常见。模糊 1 电子邮件:itzik@newton.bgu.ac.il。2 电子邮件:kopeika@bguee.bgu.ac.il。效果被认为是线性的和空间不变的,并且