XiaoMi-AI文件搜索系统
World File Search System图示
Holter 软件系统,用户手册
预期用途.................... ... ................. ... . ... . ... . ... . ... . ... . ... . ... . ... 3 注意事项 . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... 3 符号 . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ....................................................................................................................................................................................................................................................................................... 7 系统要求....................................................................................................................................................................................................................................................................................... ........................................................................................................................................................................................................................ 7 可选要求....................................................................................................................................................................................................................................................................................................... ........................................................................................................................................................................................................................ ........................................................................................................................................................................................................ 7 8 操作员要求. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 特点. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 Holter 系统应用使用说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 激活 Welch Allyn Holter 软件 . . . . . . . . . . . . 10 记录器图示 . . . . . . . . . . . . . . . . . . . 11 操作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 启动 Welch Allyn Holter 系统应用程序. . . . . . . . 19 开始测试. . . . . . . . . . . . . . . . . . . 19 测试报告审查、编辑和打印. . . . . . . . . . . . . . . . 26 设置. . . . . . . ... ... 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。47 维护. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48 清洁记录器和患者电缆. . . . . . . . . . . . . . . . . . . . . . . . . . . 48 检查记录器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 技术规格. ... . . . . . . . . . 53 FCC 信息. . . . . . . . . . . . . . . . . . . . 56 故障排除. . . . . . . . . . . . . . . . . . . . . 57 软件许可证. . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 60
航空生命保障系统维护...
• ALSS 维护管理和培训计划的样本 SOP。 • 跨部门出版帐户样本表格和文件。 • 建议的 ALSS 车间布局和存储图示;安全。 • 安全、风险管理/风险评估;环境问题。 • 安装、调整、检查、维修、存储和培训流程。 • 基本陆地、炎热和寒冷气候、沙漠、丛林 - 综合生存训练材料。 • 水上生存计划 - 水上生存训练材料。 • 销毁设备以防止敌人使用训练材料。 • 战斗逃生和逃避技术训练材料。 • 战俘抵抗训练材料。 • 机组人员恢复程序训练材料。
宿舍楼层平面图 - 格里利
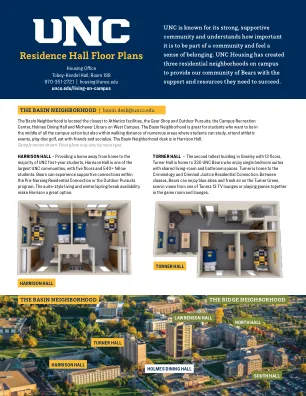
梅萨社区因位于中央校园的雄伟山丘上而得名,是校园中一个活跃而充满活力的部分,步行即可到达 Tobey-Kendel 餐厅、学生健康和咨询中心、Gunter Green 和大学中心。梅萨社区拥有美丽的建筑,包括北卡罗来纳大学一些最具历史意义的建筑,这些建筑环绕着校园社区区域,学生可以在这里学习、在花园剧院演奏音乐或表演、与朋友一起吃饭、社交以及在 Gunter Green 放松身心。梅萨社区服务台位于 Wiebking Hall。图示为样板房。楼层平面图可能因房型而异。
对 cEEGrid 和固体凝胶电极进行基准测试... - OSF
图 1. (a) ISAE-SUPAERO 的三轴运动飞行模拟器。(b) 双耳 cEEGrid 电极的定位,标有记录参考(蓝色)和 DRL(绿色)电极。右侧网格上的电极 R4a 和 R4b 未在我们的设置中记录。布局改编自 EEGLAB (v.2019.1)(Delorme and Makeig,2004)中的 cEEGrid 插件(Martin G. Bleichner,2019)。(c) 清洁和准备参与者的皮肤后,将左耳网格贴在参与者耳朵周围时的定位。(d) 带有来自 Enobio 设备的针脚的干电极(左)的图示,以及用具有硅胶稠度的固体凝胶封装的相同电极(右),以避免不适甚至疼痛。
航空业人为失误问题的设计诱发部分
人为错误,当然还有行为主义者采取的方法。通常在航空领域,这是参考图 1 这样的插图来描述的。飞行按横坐标上的阶段绘制,纵坐标是特定操作所需的任务负载。飞行员能力的极限在图示顶部水平显示为理论上限,但这一极限可能会因现实生活而降低,例如疾病、情绪变化、训练不足等。同样,如果设备发生故障或操作情况有特殊要求,无论是由于紧急情况还是任务中隐含的事件,名义任务要求都会增加。任务超负荷理论只是假设检查需要完成的任务与飞行员能力的并置;当它们重叠时,错误/事故就可能发生,因此必须纠正某些事情——任务和/或人。
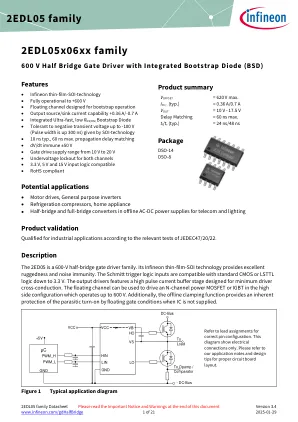
2EDL05x06xx 系列 600V 半桥栅极驱动器,带集成自举二极管 (BSD)
图 11 所示的电路描绘了三相逆变器的一条支路;图 12 和 13 显示了 Q1 和 D2 之间电流换向的简化图示。电源电路中从芯片粘合到 PCB 轨道的寄生电感被集中到每个 IGBT 的 LC 和 LE 中。当高端开关打开时,V S1 低于 DC+ 电压,其电压降与电源开关和电路的寄生元件有关。当高端电源开关关闭时,由于连接到 V S1 的电感负载(这些图中未显示负载),负载电流会瞬间流入低端续流二极管。该电流从 DC 总线(连接到 HVIC 的 COM 引脚)流向负载,并在 V S1 和 DC 总线之间产生负电压(即,HVIC 的 COM 引脚的电位高于 VS 引脚)。
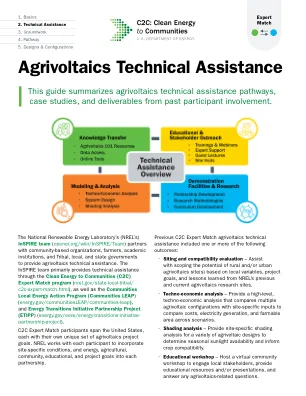
农业光伏技术援助
NREL 农光伏专家 Brittany Staie、James McCall 和 Dana-Marie Thomas(未图示)在科罗拉多州朗蒙特的 Jack's Solar Garden 与黑人农民合作组织会面,讨论农光伏设计方案、作物和农业设备兼容性、合作伙伴关系发展和现场运营。NREL 的 InSPIRE 团队 (openei.org/wiki/InSPIRE/Team) 为黑人农民合作组织成员 Cetta Barnhart 提供了技术经济分析,以通过 C2C Expert Match (nrel.gov/c2c/expertmatch) 比较她位于佛罗里达州蒙蒂塞洛的农场 Seed Time Harvest 的五种农光伏设计方案。在此处阅读有关此技术援助案例研究的更多信息 (nrel.gov/news/features/2023/nrel-partners-with-black-farmers collaboration-to-plan-solar-panels-for-forida-farms-and church.html)。摄影:Dana-Marie Thomas,NREL

基于测量的量子计算
图 2。量子电路。 (a) 这是一个由三个量子比特组成的量子电路:首先,对第一个量子比特应用一个 Hadamard 门,将 |0 ⟩ 转换为 |+ ⟩ ,然后将 CNOT 门应用于第一和第二个量子比特,接着对量子比特 2 和 3 作用另一个 CNOT 门。每个量子比特都以 0/1 为基础读出。 (b) 生成一维三量子比特簇状态的电路。经过三个 Hadamard 门后,三个量子比特变为 |+ ⟩ ,成对的 CZ 门将它们转换为簇状态的链。 (c) 3×3 自旋阵列中二维簇状态的图示。这也作为 2d 簇状态的定义。 (d) 簇状态可以推广到任何图状态,其中成对的 CZ 门根据图中的边应用于一对量子位(最初在 |+ ⟩ 中)。

制作和利用轨迹预测中的在线地图不确定性
高清(HD)地图在现代自动驾驶汽车(AV)堆栈的开发中发挥了不可或缺的作用,尽管具有高相关的标签和维护成本。因此,许多最近的作品提出了从传感器数据在线估算高清地图的方法,使AV可以在先前映射的重新下进行操作。但是,当前的在线地图估计方法是通过隔离其下游任务的,将其集成在AV堆栈中的开发。特别是它们不会产生不确定性或置信度估计。在这项工作中,我们将多个最先进的在线地图示出方法扩展到估算不确定性的额外,并显示如何与轨迹预测1允许更紧密地集成在线地图1。在这样做时,我们发现纳入不确定性的训练收敛速度最高高出50%,并且在现实世界中驾驶数据集中的预测性能高达15%。

飞行训练指导多引擎飞行...
图表 图 1-1 典型的熟悉阶段飞行流程图 ...................................................................................... 1-1 图 1-2 功率设置 .............................................................................................................. 1-13 图 1-3 正常着陆模式(进近和全襟翼) ........................................................................ 1-32 图 1-4 无襟翼着陆模式 ...................................................................................................... 1-33 图 1-5 SSE 模式 ............................................................................................................. 1-37 图 1-6 SSE 着陆模式 ...................................................................................................... 1-41 图 2-1 空速和功率设置表 ............................................................................................. 2-6 图 2-2 转弯模式 ............................................................................................................. 2-7 图 2-3 Oscar 模式 ............................................................................................................. 2-8 图 2-4 Bravo/Charlie 模式 ............................................................................................. 2-9 图 2-5 Yankee 模式 ............................................................................................................. 2-12 图3-1 典型夜间熟悉阶段飞行流程图 ...................................................................................... 3-1 图 4-1 基础操作演习 .............................................................................................................. 4-6 图 4-2 标准仪表等级起飞最低标准 ...................................................................................... 4-9 图 4-3 表 IFR 归档标准 ...................................................................................................... 4-9 图 4-4 DINS 网页 ...................................................................................................... 4-14 图 4-5 IFR 起飞最低标准和障碍物离场程序 ............................................................................. 4-17 图 4-6 TERPS 设计选项 ...................................................................................................... 4-18 图 4-7 飞行员导航 SID ............................................................................................................. 4-21 图 4-8 向量 SID ............................................................................................................. 4-22 图 4-9 带飞行员导航的向量 SID ............................................................................................. 4-23 图 4-10 军用 SID ............................................................................................................. 4-24 图 4-11 土木工程 SID ............................................................................................................. 4-25 图 4-12 切割圆弧 .............................................................................................................4-34 图 4-13 等待空速 ............................................................................................................. 4-35 图 4-14 复制等待指令 ...................................................................................................... 4-36 图 4-15 等待航线进入技术 ............................................................................................. 4-38 图 4-16 等待航线进入程序 ............................................................................................. 4-38 图 4-17 三重漂移 ............................................................................................................. 4-41 图 4-18 低空进近类别细分 ............................................................................................. 4-55 图 4-19 已建立的进场表 ............................................................................................. 4-57 图 4-20 TERPS PT 保护空域 ............................................................................................. 4-57 图 4-21 45˚/180˚ 机动 ............................................................................................................. 4-58 图 4-22 泪滴形进入 ............................................................................................................. 4-60 图 4-23 直接进入................................................................................................................ 4-61 图 4-24 HILO 进近 .......................................................................................................... 4-62 图 4-25 图示泪滴形进近 ...................................................................................................... 4-63 图 4-26 弧形/PT 进近 ...................................................................................................... 4-64 图 4-27 正常配置程序 ...................................................................................................... 4-66 图 4-28 使用连续下降最后进近的进近示例 ............................................................................. 4-70 图 4-29 垂直下降角/目视下降点 ............................................................................................. 4-73................................. 4-57 图 4-21 45˚/180˚ 机动 .............................................................................................. 4-58 图 4-22 泪滴形进入 ........................................................................................................ 4-60 图 4-23 直接进入 ........................................................................................................ 4-61 图 4-24 HILO 进近 ...................................................................................................... 4-62 图 4-25 图示泪滴形 ...................................................................................................... 4-63 图 4-26 弧形/PT 进近 ...................................................................................................... 4-64 图 4-27 正常配置程序 ........................................................................................................ 4-66 图 4-28 使用连续下降最后进近的进近示例 ........................................................................ 4-70 图 4-29 垂直下降角/目视下降点 ........................................................................................ 4-73................................. 4-57 图 4-21 45˚/180˚ 机动 .............................................................................................. 4-58 图 4-22 泪滴形进入 ........................................................................................................ 4-60 图 4-23 直接进入 ........................................................................................................ 4-61 图 4-24 HILO 进近 ...................................................................................................... 4-62 图 4-25 图示泪滴形 ...................................................................................................... 4-63 图 4-26 弧形/PT 进近 ...................................................................................................... 4-64 图 4-27 正常配置程序 ........................................................................................................ 4-66 图 4-28 使用连续下降最后进近的进近示例 ........................................................................ 4-70 图 4-29 垂直下降角/目视下降点 ........................................................................................ 4-73