XiaoMi-AI文件搜索系统
World File Search System地图绘制

利用GIS技术对犯罪数据进行分析和可视化
摘要:犯罪地图是识别犯罪模式的重要方法。犯罪地图被广泛用于可视化犯罪的空间分布和分配安全资源。合格的制图表示对于呈现犯罪分析结果至关重要,因此犯罪地图的编制和丰富需要严格遵守制图原则。本文介绍了一种综合且易于理解的制图方法和技术,用于土耳其特拉布宗的犯罪分析和犯罪地图绘制。在分析和制图过程之前,对 2011 年至 2015 年之间记录的犯罪数据进行了重新分类。在下一阶段,应用了错误数据的编辑、标准化和地理编码过程。使用核密度估计法分析和绘制了所有犯罪的空间分布。六边形网格制图技术和热点方法用于可视化空间数据和犯罪活动的时间趋势。使用这些技术绘制了入室盗窃和袭击罪(所有犯罪中最常见的犯罪)的空间和时间分布。地图还提供研究区域犯罪模式的详细信息,并帮助警察部门制定安全城市战略并减少犯罪活动。
Linda Vista 社区计划
市长 Susan Golding Harry Mathis Byron Wear Christine Kehoe George Stevens Barbara Warden Valerie Stallings Judy McCarty Juan Vargas 市检察官 Casey Gwinn 市长 Jack McGrory,前市长 Michael Uberuaga,市长 Penelope Culbreth-Graft,DPA,助理市长 规划委员会 Mark Steele,主席 Verna Quinn Andrea Skorepa Frisco White Bill Anderson Patricia Butler David Watson 社区和经济发展部 Kurt Chilcott,社区和经济发展部经理 Mike Stepner,城市设计协调员 Betsy McCullough,社区规划和发展部经理 Miriam Kirshner,高级规划师,项目经理 Tom Bruccoleri,交通规划师 Craig Tenessen,交通规划师 Tom Simpson,公园和娱乐部 Janet Wood,社区振兴经理 Lydia Medina,设施融资项目经理 Janet Atha,地图绘制 Sam Riordan,平面设计师 Victoria Charfauros,文字处理器开发服务部 Tony Gangitano,街景设计 Leisa Lukes,街景设计 Anne Lowry,环境评估 Chris Zirkle,环境评估
谁在资助欧洲的人工智能与社会工作?欧洲人工智能与社会基金的概况回顾
这项工作需要资金来维持。慈善资助使组织能够参与政策和倡导工作,并可以自由地追求独立于企业利益的使命。欧洲人工智能与社会基金汇集了 14 个慈善基金会的捐款,提供资金和能力建设,目前正在支持 30 个组织。然而,我们已经看到,考虑到该领域旨在解决的挑战规模,该领域仍然资源不足,而且民间社会对承担这项工作的兴趣远远超出了我们的能力范围。为了了解如何让更多的慈善组织参与支持该领域,我们对受助者进行了调查,以了解他们的需求 1 ,对当前的资金状况进行了研究 2 ,并采访了一些尚未成为 EAI&SF 合作伙伴的基金会 3 ,以了解围绕人工智能开展慈善活动的机会和障碍。这项研究以基金在 2021 年进行的先前地图绘制工作 4 为基础。然后,我们得出了关于欧洲人工智能与社会基金根据这些见解采取行动的机会的结论。
蒙特苏马县社区野火保护计划
在州和联邦消防机构、蒙特苏马县政府和当地消防区之间举行了多次会议。 对野火风险进行评估,从而绘制了新版蒙特苏马县火灾风险 - 关注社区地图(附件)。 举行了一系列社区范围和消防区级别的会议,向居民通报风险/风险降低策略以及支持性公共和私营部门资源,包括以下主题:松果虫疫情和干旱、火灾在生态系统中的作用、防御空间、疏散、疏散期间对宠物和牲畜的照顾。 在当地电视台播放了视频“第一道防线”。 发表了一系列关于野火危害缓解的新闻文章。将 CWPP 草案发送给主要利益相关者进行审查。 开发了原型分区级燃料缓解计划。 继续改进地图绘制和技术资源。 出版了《旱生植物景观设计指南》,其中包括防御空间策略和防火景观设计信息和建议。
公共卫生主任 2024 年度报告执行...
• 试行低水平的干预措施,例如与父母进行社交团体等,为他们提供分享经验的机会,并从其他父母那里获得育儿方面的建议。这些团体包括一个散步团体和一个关注“宝宝和我”的健康团体。 • 培训专业人士如何鼓励父母与宝宝互动,培养“亲密而充满爱的关系”。 服务包括:索利哈尔方法育儿计划和“五岁茁壮成长”计划。这两个计划都侧重于如何支持父母了解婴儿大脑发育及其对孩子未来情感健康和幸福的重要性。 • 通过数字平台为父母提供涵盖身体和情感发展的信息,并为那些数字访问有限的人提供印刷版。 Healthy Child Wolves 是该市父母的主要平台,包括从地图绘制练习中收集的信息,其中列出了可供父母使用的团体和服务范围。当父母需要寻求更多帮助时,也可以获得有关法定服务的信息。

未知空间上的协同映射和目标搜索...
摘要 — 本文提出了一种协作式地图绘制和目标搜索算法,用于在城市环境中检测单个移动地面目标,该目标最初对于配备有噪声、范围有限的传感器的自主四旋翼飞行器团队来说是未知的。目标根据有偏随机游走模型移动,搜索代理(四旋翼飞行器)构建一个目标状态图,该图对过去和现在的目标位置进行编码。检测前跟踪算法将目标测量值同化为对数似然比,各向异性克里金插值预测未探索区域中占用节点的位置。在搜索区域的每个位置评估的相互信息定义了一个采样优先级表面,该表面由加权 Voronoi 算法划分为候选航路点任务。通过迭代解决效用最大化分配问题,将任务分配给每个代理。数值模拟表明,与非自适应割草机和随机覆盖策略相比,所提出的方法更具优势。我们还通过使用两个真实四旋翼飞行器和两个虚拟四旋翼飞行器进行户外飞行测试,对所提出的策略进行了实验验证。
eeb-可再生能源空间规划概述和...
为响应对 RED III 的修订,CAN Europe、Birdlife、EEB 和 WWF EPO 联合委托撰写了这份报告,概述了成员国如何努力实施这些要求。根据调查结果,该报告旨在为实施过程中的进一步措施提出建议,这些措施有助于制定战略,允许以加速、但又对环境和社会可持续的方式允许可再生能源项目。为了收集实时的国家特定见解,本研究重点关注 RED III 对空间规划的影响以及六个成员国(爱沙尼亚、德国、希腊、西班牙、波兰和葡萄牙)的 RAA 指定状态。为此,我们评估了空间规划的现状以及敏感性测绘和公众参与等关键工具。该报告指出了每个成员国面临的障碍,并提供了针对具体国家和总体的建议,以弥补已发现的差距。为了进行详细分析,我们提供了三个案例研究,这些案例研究可作为其他成员国可以从中汲取宝贵经验的指导性示例。其中包括葡萄牙加快指定 RAA 的做法、西班牙的敏感性地图绘制以及德国可再生能源开发区域的参与流程。

谷歌火星
建议年级 4 年级 -12 年级 学科领域 地球科学、空间科学、语言艺术 时间线 45 分钟 标准 • 4-ESS1-1. 从岩层模式和岩层化石中识别证据,以支持对地貌随时间变化的解释。 • 4-ESS2-2. 分析和解释地图数据以描述地球特征的模式。 • MS-ESS1-3. 分析和解释数据以确定太阳系中物体的比例属性。 背景 人类想要了解我们的自然环境。熟悉我们的世界很重要。随着时间的推移,地图绘制技术不断发展。我们有键、比例、符号、经纬度坐标来精确定位地球上的确切位置,以及颜色/线条来显示海拔。凭借我们目前对地图技术的了解和阅读地球地图的能力,我们现在能够将其与火星联系起来。从纯粹的观察开始,然后轨道器收集火星图像。现在我们甚至在火星上有了探测器和着陆器。这种侦察与技术相结合,使我们能够突破探索的极限。地图是其中的重要组成部分。它们让我们熟悉陌生的事物,准确地侦察出潜在的着陆点,并让我们能够“先知后知”。
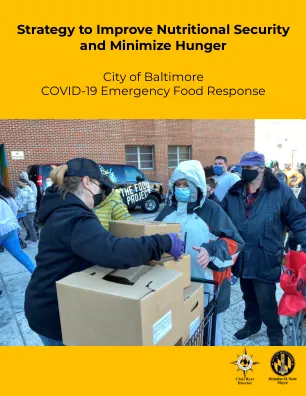
巴尔的摩市 COVID-19 紧急食品应对
规划部食品政策和规划司 (FPP) 负责监督巴尔的摩食品政策倡议 (BFPI)。BFPI 的三个层级涵盖政府、组织和居民,通过巴尔的摩市机构、食品政策行动联盟 (Food PAC) 和居民食品公平顾问之间的跨机构合作。在已经建立的结构下,工作人员能够动员起来并主要关注 COVID-19 响应。在 COVID-19 期间,食品政策主任和食品规划师团队:1) 领导食品安全响应的战略规划;2) 进行地图绘制和数据分析;3) 监督农产品、杂货和混合箱战略和实施,包括物流、资金、社区外展和场地扩展;4) 与紧急行动中心以及州和联邦机构协调;5) 利用大量公共和私人资金用于食品和交通;6) 加快在线 SNAP 并防止 15,000 名居民失去 SNAP; 7) 召集居民食品公平顾问和食品 PAC;8) 支持城市农业和当地食品系统的恢复能力。紧急食品应对计划是动员机构间合作制定和实施应对计划的一个极好例子。

基于无人机的 GPS 拒绝环境中目标跟踪的协作 Visual-SLAM 系统:以目标为中心的方法
摘要:使用无人机 (UAV) 自主跟踪动态目标是一个具有挑战性的问题,在许多场景中都有实际应用。在这种情况下,必须解决的一个基本方面与空中机器人的位置估计和控制飞行编队的目标有关。对于非合作目标,必须使用机载传感器估计其位置。此外,对于估计无人机的位置,全球位置信息可能并不总是可用的(GPS 拒绝环境)。这项工作提出了一种基于视觉的合作 SLAM(同步定位和地图绘制)系统,该系统允许一组空中机器人自主跟踪在 GPS 拒绝环境中自由移动的非合作目标。这项工作的贡献之一是提出并研究使用以目标为中心的 SLAM 配置来解决与众所周知的以世界为中心和以机器人为中心的 SLAM 配置不同的估计问题。从这个意义上说,所提出的方法得到了从广泛的非线性可观测性分析中获得的理论结果的支持。此外,还提出了一种控制系统,用于保持相对于目标的稳定无人机飞行编队。在这种情况下,使用 Lyapunov 理论证明了控制律的稳定性。通过采用大量计算机模拟,所提出的系统显示出可能优于其他相关方法。