机构名称:
¥ 1.0
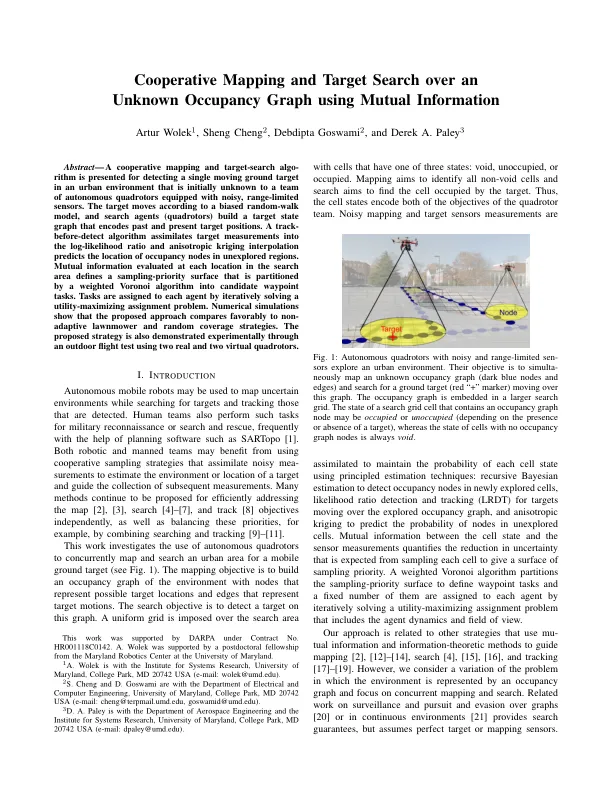
摘要 — 本文提出了一种协作式地图绘制和目标搜索算法,用于在城市环境中检测单个移动地面目标,该目标最初对于配备有噪声、范围有限的传感器的自主四旋翼飞行器团队来说是未知的。目标根据有偏随机游走模型移动,搜索代理(四旋翼飞行器)构建一个目标状态图,该图对过去和现在的目标位置进行编码。检测前跟踪算法将目标测量值同化为对数似然比,各向异性克里金插值预测未探索区域中占用节点的位置。在搜索区域的每个位置评估的相互信息定义了一个采样优先级表面,该表面由加权 Voronoi 算法划分为候选航路点任务。通过迭代解决效用最大化分配问题,将任务分配给每个代理。数值模拟表明,与非自适应割草机和随机覆盖策略相比,所提出的方法更具优势。我们还通过使用两个真实四旋翼飞行器和两个虚拟四旋翼飞行器进行户外飞行测试,对所提出的策略进行了实验验证。
未知空间上的协同映射和目标搜索...
主要关键词




相关文件推荐