XiaoMi-AI文件搜索系统
World File Search System搜索




Q*搜索:启发式搜索with Q-networks
使用*搜索有效地解决大型动作空间的问题对人工智能界一直很重要。这是因为A*搜索的计算和内存要求与动作空间的大小线性增长。当*搜索使用通过计算昂贵的函数近似器(例如深神经网络)学习的启发式功能时,这种负担就变得更加卑鄙。为了解决这个问题,我们介绍了Q*搜索,一种搜索算法,该算法使用深Q-networks指导搜索,以利用一个事实,即可以通过一个深层的Q-Network在不明确产生这些孩子的情况下通过深层Q-Network来计算过渡成本的总和和节点子女的启发式值。这大大减少了计算时间,并且仅需要一个迭代生成一个节点。我们在不同的域和操作空间上使用Q*搜索,表明随着动作尺寸的增加,Q*仅从小型运行时间开销。此外,我们的经验结果表明,Q*搜索的速度最高129倍,并且比*搜索的节点最多生成1288倍。最后,尽管从深处神经网络中获得可允许的启发式函数是一个持续的研究领域,但我们证明Q*搜索被保证在启发式功能的情况下找到最短的路径并不能过分估计该州的过渡成本和成本的总和。


搜索和实验验证...
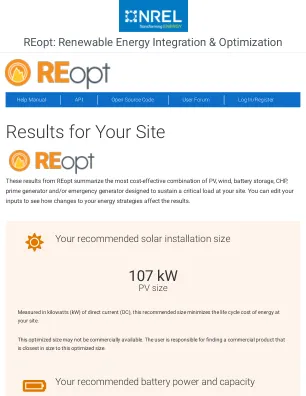
本文提出了一种新型搜救遥控机器人(ROV)系统的设计方案,其目标是实现水下目标搜索探测和小目标捕获及救援作业要求。首先给出了整个水下系统总体设计和推进系统布局设计。在此基础上对ROV框架结构、电子舱、动力舱进行设计分析。为完成抓取任务,基于多功能机械手设计了抓取手,实现水下抓取。为使ROV更加智能化,采用并分析了多种水下物体检测与跟踪方法。最后,在水池和海上进行了试验,验证了所设计的搜救ROV的可靠性和稳定性。

高管搜索
James 热衷于将多样性、公平性和包容性放在工作的最前线,从成为多元化 Peridot 团队的重要成员,到我们 EDI 委员会的成员,负责对内部和外部的做法进行批评和改进。James 支持候选人完成他们自己的招聘旅程,并在每一步都指导客户,以确保候选人成功入职。在他的整个招聘生涯中,他一直致力于自我发现自我身份,接受挑战并将其转化为机遇。James 学会了利用自己的优势,并致力于帮助他人走上自己的道路。James 探索脆弱性、创造力和同理心等品质,因为对我们来说,它们不仅仅是文字;它们是我们在所安置的人身上看到的品质,它们在现代领导力中发挥着重要作用,使慈善机构能够蓬勃发展、发展并增强其影响力。James 是一名慈善受托人、LGBTQ+ 社区的骄傲成员、神经多样性者和移民;他被英国收养,并在那里安了家。