XiaoMi-AI文件搜索系统
World File Search System地理参考

相机/IMU 瞄准镜校准 - Applanix
在使用 GPS/IMU 进行直接地理参考测绘模式或甚至使用空中三角测量测绘时,相机/IMU 视轴校准是测绘过程中的关键要素。一些研究人员证明了需要最佳的视轴校准过程、程序和软件工具。因此,本文重点介绍使用 Applanix Corporation 新发布的 POSCal TM 软件在视轴校准领域的最新发展。首先,简要讨论以描述性方式总结软件功能。然后,简要介绍了软件中实现的多种分析工具,这些工具是进行 GPS、IMU、图像、地面控制和基准问题的质量保证和质量控制所必需的。已经进行了一项分析研究来测试该软件的分析工具。这项研究使用了加利福尼亚州奥克兰的 HJW GeoSpatial Inc 和欧洲实验摄影测量研究组织 (OEEPE) 的试点中心(汉诺威大学)收集的真实数据集。所有数据集均由配备 6 英寸镜头锥体的 9 英寸 x 9 英寸胶片相机和 Applanix POS/AV TM 510 系统采集。此外,所有数据集都具有良好的地面控制点数量、分布和准确性、高质量的图像测量值以及良好的 GPS 和 IMU 数据。这使得我们可以从高质量的数据集开始,其中故意引入偏差和噪声进行分析 p

案例研究 - OECD
区域当局需要有关森林状况的详细地理参考信息,以确保可持续的森林管理。森林资源清查受到资源密集型实地工作的限制,而遥感 (RS) 则提供快速、可靠且可复制的数据收集和处理。近年来,结合机载激光扫描 (ALS) 数据和合成孔径雷达 (SAR) 数据的研究活动有所增加。本研究的总体目标是结合机载激光雷达数据、光学卫星数据和雷达卫星数据来估计位于中欧的异质森林的立木量。对综合森林管理单位 FMU Vígľaš(斯洛伐克)进行了案例研究。具体而言,机载和星载数据集的组合包含以下步骤:(1)基于 ALS 的建模 - 基于 ALS 的冠层高度模型的指标与测量的立木蓄积量,(2)基于 ALS 的测绘 - 使用基于 ALS 的模型估算 FMU 级别的立木蓄积量,(3)基于 SAT 的建模 - 基于 SAT 的数据集的指标与基于 ALS 的立木蓄积量估计值,(4)基于 SAT 的测绘 - 使用基于 SAT 的模型估算 FMU 级别的立木蓄积量,(5)精度评估 - 将 ALS 和 SAT 估计的立木蓄积量与 45 个异质测试地块内的地面参考数据进行比较。基于 ALS 的立木蓄积量是基于以平均冠层高度为预测因子的简单线性回归模型估算的。该模型实现了

Redd Counts - 美国渔业协会
摘要 本协议的目的是描述用于持续收集鲑鱼产卵林丰度并随后估计成年鲑鱼繁殖种群大小的现场方法。我们建议使用空间平衡的旋转面板设计在预定的 3-5 公里长的河段进行调查。我们建议每年抽取采样范围内所有河段的 10% 作为监测目标;此外,为了解决访问问题和其他采样障碍,我们建议初始样本抽取应过度选择河段(采样率为 25%)以提供现场灵活性。一次现场调查应在鱼进入产卵区之前进行,此后每隔 7-14 天进行一次调查,直到不再观察到新鱼和产卵林。调查人员需要认识到,河流流量和/或天气条件会对调查的时间方面产生一定影响。所有产卵林都将被标识为物种、进行测量和地理参考。通过跟踪在之前调查期间测量的单个产卵林的状况,将估计每个流域的产卵林寿命和观察者在产卵林检测中的效率。为了记录性别比例,将根据产卵林的行为或其他视觉线索对所有活鱼的性别进行目视识别(将对死鱼进行标识、性别鉴定、检查标签和测量,按照第 59 页的尸体计数协议进行)。在多个鲑鱼物种在给定的产卵区重叠的情况下,产卵林的大小将有助于区分所涉及的物种。
FACSAT-2 任务立方体卫星的关键设计,用于观测和分析
摘要 本文介绍了用于 FACSAT-2 (SAT-CHIRIBIQUETE) 太空任务的立方体卫星的关键设计,该卫星用于对哥伦比亚领土进行地理参考观测和分析,以保护环境。该卫星通过两个有效载荷提供电光多光谱图像(分辨率在 4.75 m 和 5 m 之间)数据,同时使用 1000-1700 nm 短波红外光谱范围内的光谱仪提供数据,用于监测温室气体。根据高级技术要求和操作概念,进行了空间、地面和发射段架构的输入识别和定义,定义了一个六单元卫星、一个位于卡利市的带有 S/X 波段天线的地面段,以及使用具有发射器相关特性的 EXOpod。根据欧洲航天局的 ECSS 标准,详细定义和表征了机械结构、电力系统、数据和命令处理系统、机载通信系统和姿态控制和确定系统的子系统。初始设计方案是根据空间、操作和技术要求以及可用于太空任务的财务预算定制的。值得注意的是,本文包含哥伦比亚的独家贡献,包括 S/X 波段天线的定义、加密软件以及物理接口板的设计和实施,以实现卫星总线和 Argus 2000 光谱仪之间的电子兼容性。关键词:FACSAT-2;立方体卫星;关键设计;航天器子系统;空间架构;MultiScape;Argus;地球观测;空间发展;哥伦比亚在太空。

巨石:评估机器人和载人应用的立体瞄准策略。TA Roseborough 1、AJ Sonke 2 和 MS Robinson 1、1 I
我们使用 3DF Zephyr 构建 3D 模型。对于每个序列,我们导入图像并掩盖巨石周围的区域。我们从图像中生成稀疏点云。在此阶段,我们通过创建地面控制点 (GCP) 将特征上的位置与纬度、经度和海拔值联系起来,从而对该特征进行地理参考。我们使用 30 厘米/像素的国家农业图像计划 (NAIP) 图像和 25 厘米/像素的航空激光雷达数字地形模型 (DTM) 在 ArcGIS Pro 中为每个站点标记了 3 个 GCP 位置 (图 1a) [5]。我们使用 ArcGIS Pro 确定 GCP 的坐标以及从 DTM 中提取这些位置的海拔,我们使用简单的双线性插值来完成此操作,以最好地近似该特定位置的海拔。我们导入了这些点并运行了捆绑调整;如果程序报告的不确定性 <0.01 米,我们认为这些是良好的 GCP。如果任何 GCP 残差较高,我们会调整其位置并重新导入。对 GCP 对齐感到满意后,我们继续创建密集点云、网格和纹理网格(图 1b、c)。对于所有步骤,我们都使用 3DF Zephyr 默认设置。模型完成后,我们生成了一份处理报告,其中提供了平均地面采样距离 (GSD)(我们用其作为分辨率的代理)和模型表面积等信息。我们还将计算出的相机位置导出到 ArcGIS Pro(图 1a),并使用测量工具检查到特征的位置距离以及相机位置之间的距离。我们测量了步骤之间的直线距离,并
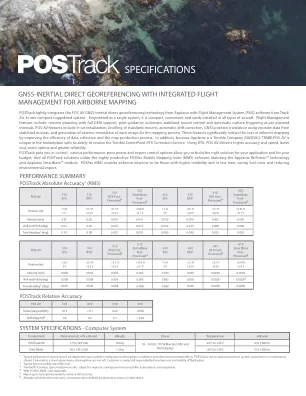
规格 - Applanix
POSTrack 将 Applanix 的 POS AV GNSS-Inertial 直接地理参考技术与 Track’ Air 的飞行管理系统 (FMS) 软件紧密集成在一个紧凑坚固的系统中。它设计为一个单一系统,紧凑、方便且易于安装在所有类型的飞机上。飞行管理功能包括:具有完整 DEM 支持的任务规划;飞行员指导;自动稳定支架控制和按预定间隔自动触发相机。POS AV 功能包括空中初始化、稳定支架调平、自动漂移校正、使用来自稳定支架的编码器数据进行 GNSS 位置转换以及为测绘过程生成每个图像的外部方向。这些功能通过提高数据收集和地图制作过程的效率,显著降低了机载测绘的成本。此外,由于 Applanix 是 Trimble 公司 (NASDAQ: TRMB) 旗下子公司,POS AV 凭借其接收 Trimble CenterPoint RTX 校正服务的能力在市场上独树一帜。使用 RTX,POS AV 可提供更高的精度和速度、更低的成本、更长的正常运行时间和更高的可靠性。POSTrack 让您掌控一切:各种性能、价格点和出口控制选项允许您为您的应用程序和预算构建正确的解决方案。所有 POSTrack 解决方案都采用高效的 POSPac Mobile Mapping Suite (MMS) 软件,具有 Applanix IN-Fusion™ 技术和 Applanix SmartBase™ 模块。POSPac MMS 使空中任务能够以更高的可靠性和更短的时间完成,从而节省燃料成本并减少对环境的影响。

集成惯性/相机系统的视轴校准
集成惯性/相机系统的视轴校准 Mohamed M. R. Mostafa Applanix Corporation 85 Leek Cr., Richmond Hill Ontario, Canada L4B 3B3 电话:(905) 709-4600 分机 274 电子邮件:mmostafa@applanix.com 个人简介 Mohamed Mostafa 负责 Applanix Corporation 机载系统的研究和开发,并担任美国摄影测量和遥感学会直接地理参考委员会主席。他分别于 1991 年和 1994 年获得亚历山大大学理学学士学位和理学硕士学位,并于 1999 年获得卡尔加里大学博士学位。他的研究兴趣是使用多传感器系统进行地图绘制。摘要 集成成像/惯性系统的视轴校准是地图制作的关键因素,尤其是在数字成像传感器的情况下。因此,本文的重点是使用不同方法进行视轴校准。介绍了两种视轴校准方法,即机载和地面方法。传统的机载视轴校准已成功使用了几年,但它不能满足某些机载数字系统的某些操作参数。或者说,这里介绍的地面校准方法从未在典型的数字地图制作中使用过。在本文中,针对数字多传感器系统介绍了机载和地面视轴校准的概念。提供了数据结果和分析,以强调使用这两种方法实现的准确性。1.简介 过去几年,测绘行业一直致力于实施新技术先进的多传感器系统进行地图制作。这些系统目前正在取代传统的航空测绘系统,用于资源测绘和机载遥感等应用,并开始在工程和地籍测绘等其他应用中展开竞争。通常,多传感器数字系统由一个或多个用于图像采集的数字相机系统和 GPS 辅助惯性系统组成
最终报告 - 航空安全网络
图片列表 图 1:坠机地点地理参考 图 2:最终撞击点 图 3:坠机前 13 分钟的天气 图 4:坠机前 8 分钟的天气 图 5:坠机前 6 分钟的天气 图 6:坠机前 5 分钟的天气 图 7:坠机前 4 分钟的天气 图 8:坠机前 3 分钟的天气 图 9:坠机前 2 分钟的天气 图 10:坠机前 1 分钟的天气 图 11:坠机时的天气 图 12:坠机后 1 分钟的天气 图 13:分离的树木图片 图 14:残骸照片 图 15:第 5 次飞行(坠毁飞行)最后 3 分钟数据:间隔 15 秒 图 16:第 4 次飞往卢克拉的飞行最后 3 分钟数据:间隔 15 秒 图 17:第 3 次飞往卢克拉的飞行最后 3 分钟数据:间隔 15 秒 图 18:第 4 次飞往卢克拉的飞行最后 3 分钟数据2017 年 5 月 27 日 9N-AKY 最后三次连续飞行 图 19:2017 年 5 月 27 日 9N-AKY 最后三次连续飞行的高度剖面图比较 图 20:2017 年 5 月 27 日 9N-AKY 最后三次连续飞行的指示空速 (IAS) 比较 图 21:功率曲线 图 22:右侧轨迹是命运多舛的 GOMA AIR 飞机 9N-AKY 的轨迹 图 23:Goma Air 409 的最终飞行路径以及同步的关键 CVR 记录的时间戳
集成惯性/摄像系统的瞄准线校准
集成惯性/相机系统的视轴校准 Mohamed M. R. Mostafa Applanix Corporation 85 Leek Cr., Richmond Hill Ontario, Canada L4B 3B3 电话:(905) 709-4600 分机 274 电子邮件:mmostafa@applanix.com 个人简介 Mohamed Mostafa 负责 Applanix Corporation 机载系统的研究和开发,并担任美国摄影测量和遥感学会直接地理参考委员会主席。他分别于 1991 年和 1994 年获得亚历山大大学理学学士学位和理学硕士学位,并于 1999 年获得卡尔加里大学博士学位。他的研究兴趣是使用多传感器系统进行地图绘制。摘要 集成成像/惯性系统的视轴校准是地图制作的关键因素,尤其是在数字成像传感器的情况下。因此,本文的重点是使用不同方法进行视轴校准。介绍了两种视轴校准方法,即机载和地面方法。传统的机载视轴校准已成功使用了几年,但它不能满足某些机载数字系统的某些操作参数。或者说,这里介绍的地面校准方法从未在典型的数字地图制作中使用过。在本文中,针对数字多传感器系统介绍了机载和地面视轴校准的概念。提供了数据结果和分析,以强调使用这两种方法实现的准确性。1.简介 过去几年,测绘行业一直致力于实施新技术先进的多传感器系统进行地图制作。这些系统目前正在取代传统的航空测绘系统,用于资源测绘和机载遥感等应用,并开始在工程和地籍测绘等其他应用中展开竞争。通常,多传感器数字系统由一个或多个用于图像采集的数字相机系统和 GPS 辅助惯性系统组成

GPS/INS 系统与 HRSC 的应用
关键词:集成 GPS/INS 系统、系统比较、HRSC-A 多立体相机 摘要 自 1997 年以来,德国航空航天中心 (DLR) 一直将机载 HRSC (HRSC-A/AX) 与直接地理参考方法结合使用。使用 GPS/INS 系统,可以实现许多科学和商业应用,这些应用可实现标准产品的分米级精度,例如真正射影像马赛克和数字表面模型。使用数字线扫描仪技术进行连续和高分辨率数据采集可能是评估来自 GPS/INS 系统的定向数据质量的最佳工具。HRSC 的多立体功能为精确的 3D 建模和外部定向数据可靠性调查提供了额外的手段。2002 年 3 月,德国航空航天中心空间传感器技术与行星探索研究所与 BSF L UFTBILD GmbH 和 IGI mbH 合作,使用两个 GPS/INS 系统 A PPLANIX POS/AV-510 和 IGI AEROcontrol-IId 同时对 HRSC-A 进行了试飞。本文介绍了基于 HRSC-A 数据摄影测量处理的两个 GPS/INS 系统外部方向质量的调查结果。1.简介 自 1997 年以来,德国航空航天中心 (DLR) 行星研究所一直在运行数字高分辨率立体相机 - 机载 (HRSC-A) [4,5,6,7]。多线扫描仪数据的摄影测量处理需要记录精确且连续的位置和姿态数据。这种数字线扫描仪非常稳定且众所周知的内部方向,结合其高几何分辨率和扫描频率为 450 Hz 的永久图像数据采集,为研究 GPS/INS 系统的质量提供了可能性。尽管之前进行了测试 [1],但可以使用适合此任务的理想传感器在相同条件下对 A PPLANIX UND IGI 的 GPS/INS 系统进行首次真正的比较。2.测试配置