XiaoMi-AI文件搜索系统
World File Search System声纳浮标

消耗性声纳浮标水听器
已启动一项任务,以开发一种允许常规和参数波束形成的声纳系统传感器。可用的空间约束和所需的声功率密度要求从同一换能器阵列生成常规和参数信号。报告了大量研究,记录了为确定最佳参数主频率而进行的模拟和实验。开发了一种双模换能器来生成常规和参数信号。该换能器能够在两个相距近 2.5 个八度的独立频率上进行高功率传输,并且在两个频率上都具有宽带宽。低频换能器是传统的 Tonpliz,其头部质量由多个节点安装的高频换能器组成,这些换能器可生成参数信号。高频换能器的节点板允许低频换能器将声能传输到介质,而不会横穿高频换能器的声压释放。数据显示了这些换能器的一小部分阵列的性能。

声纳浮标显示集成
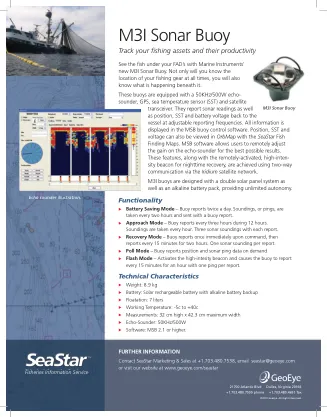
声纳浮标是一种消耗性声纳系统,通常从飞机或船舶部署,用于反潜战作业或水下声学研究。检测、分类、定位和跟踪是声纳操作员的四项基本任务。其中,通过单个被动或主动声纳系统对潜在接触的初步检测是第一个,通常也是最困难的。这是由于水下声音传播模式复杂、环境噪声源的存在以及现代常规潜艇辐射噪声的减少。因此,在单个或多个地理上分离的平台上集成来自多个传感器系统的数据被广泛认为是解决此问题的有效策略。如 [1] 中所述,声纳数据集成可以在各个级别执行,包括原始数据级别、检测级别、信息级别和显示级别。每种类型的集成在一定程度上都有利于声纳操作员执行四项基本任务中的一项或多项。例如,集成来自空间上不同位置的多个传感器的数据可大大提高目标定位和目标运动分析的准确性。与线性阵列(例如
触发和警报声纳浮标系统
北美行业分类系统 (NAICS): 334290 - 其他通信设备制造 334310 - 音频和视频设备制造 334511 – 搜索、探测、导航、制导、航空、航海系统及仪器制造 541712 - 物理、工程和生命科学研究与开发(生物技术除外) 517919 - 所有其他电信 541512 - 计算机系统设计服务 541330 – 工程服务 541519 - 其他计算机相关服务 541990 – 所有其他专业科学和技术服务 541690 – 其他科学和技术工程咨询服务 237130 – 电力和通信线路相关结构建设 517410 - 卫星电信 541620 - 环境咨询服务 512290 - 其他录音行业

声纳浮标:一种改进的设计方法
摘要:提出了一种改进微处理器控制声纳浮标系统性能的设计方法,用于监视水下物体。当微处理器控制的浮标发射到海中或海洋中时,它开始自动扫描水下物体,以提取物体信息并通过无线方式将其传输到远程地面站进行进一步处理并采取最终控制措施。本文介绍了采用 11 单元副本相关的声纳浮标系统设计大纲,从而提高了系统性能。虽然使用最近的数字延迟线可以最大限度地降低硬件副本相关器的复杂性,但所提出的微处理器控制浮标通过软件执行副本相关并提取物体信息,从而提高了系统性能。

气动声纳浮标发射系统 - L3Harris
声纳浮标旋转发射系统 (SRL) 是一种气动发射器,能够在发射间隔三秒内释放十个 A 型声纳浮标。该系统直接安装在飞机地板上,可在飞行中重新装填,并以 1000 至 5000 psi 的充气压力运行。SRL 可以在一次 5000 psi 预充气下发射四十个声纳浮标。SRL 可以与机载压缩机或预充气蓄能器耦合,以实现定制任务能力。

声纳浮标控制防空导弹飞行分析...
在防空导弹制导系统分析中,最重要的问题之一是选择一种制导空空导弹到达目标的方法。这相当于选择由所谓的制导算法确定的导弹飞行轨迹,即描述其运动所受约束的方程。理论上可以制定无数这样的算法。然而,在这些算法中,重要的是选择那些满足许多额外必要条件的算法,例如:最小过载、最小功率需求、制导算法实施的简易性等。通常,制导算法的制定是一项非常复杂的任务,通常只能用数字方法来解决。它只受空空导弹飞行动力学、控制电路动力学以及控制执行器动力学等复杂方程的影响。本文尝试分析防空导弹飞行控制的一种可能性,其方法类似于专利方案 [1] 中提出的方法,然后在论文 [2] 中进行了开发(图1)。


固定声纳浮标发射器的概念开发
是否有可能应用概念开发方法来解决实际的工业问题?本研究将研究这是否可能。萨博订购了一个概念,允许从加压飞机舱发射声纳浮标,这是一个测试该理论的绝佳机会,因为它是一个真实的系统,具有确保稳健性和安全性的技术要求。该系统需要在狭窄区域内操作,这就是不使用任何发射器的原因,它们无法满足这一需求。该概念还需要满足许多要求,必须在概念过程中确保这些要求。在开发组件时,萨博很少进行彻底而系统的概念开发过程。因此,看看它如何与萨博相关产品配合使用很有趣。