XiaoMi-AI文件搜索系统
World File Search System声速

Fetch AZA – 自校准底部压力记录仪
特性 类型 8306 深度额定值 3,000 m 工作频率 MF (20–34 kHz) 换能器波束形状 定向/全向 发射源级别 (dB re 1 µPa @ 1 m) 190–202/187–196 dB 接收灵敏度 (dB re 1 µPa) <85 dB 通信 声学调制解调器和蓝牙无线 电池寿命 (锂电池) 典型 10 年,(504 Ah) (取决于传感器和采样间隔) 机械结构 玻璃球、双层不锈钢防护罩、PVC 外壳和钛合金端口 工作温度 -5 至 +35°C 存储温度 带电池 0 至 +30°C 不带电池 -5 至 +35°C 重量 带支架 145 kg 不带支架 62 kg 水中重量 带支架 830 N 不带支架 25 N (负浮力) 传感器和选项 AZA 现场自校准机制 标准 高精度温度传感器(±0.015°C) 标准 传递压力传感器 石英, (±0.01%) 标准 第二石英 选配 环境压力传感器 应变计, (±0.01%) 标准 应变计, (±0.19%) 选配 低量程压力传感器 (应变计, 2 bar (±0.01%)) 标准 声速传感器 校准条件下精度为 ±0.02 m/s

开发用于确定弹道导弹撞击点的全球定位系统/声纳浮标系统
应答器声纳浮标导弹撞击定位系统 (DOT I SMILS),利用由任务支援飞机投放的几种类型的声纳浮标。典型的声纳浮标直径为 4.5 英寸,长度不到 36 英寸。当浮标从飞机上自由落体时,一个小型阻力降落伞会展开,并稳定浮标坠入水中。撞击时,降落伞会释放,天线会竖起。在某些浮标中,天线位于小气球(浮子)组件中,该组件由声纳浮标中压力瓶中的气体充气。气球为浮标提供额外的浮力,并保护天线免受盐雾侵害。在气球充气的同时,浮标会释放一个水听器组件,该组件下降到大约 30 英尺的深度。水听器拾取其他浮标产生的声学信号和每次再入飞行器撞击的声音,并通过甚高频无线电链路将该信息传输到上空盘旋的任务支援飞机。阵列中的某些浮标部署了第二个水听器,将声学应答器命令信号注入水中。图 1 所示的导弹撞击定位系统中使用了各种类型的浮标。测速浮标测量水中的声速,而深海温度计浮标测量温度
跨大气和空间推进的基本原理
A 面积 a 加速度、半长轴长度、声速 B i 原子总数 B 磁感应强度/磁通密度 b 半短轴长度 c 光速[299.792 x 10 6 m/s] c ∗ 特征速度 c D 阻力系数 ck 质量分数 c L α 升力系数 cp 恒压比热容 c T 推力系数 cv 恒容比热容 D 阻力 E 期望 E 电场 E KE 粒子动能 E pot 粒子势能 e 比机械能、比能 F 力、焦点 G 吉布斯自由能 G 万有引力常数[6.674 x 10 − 11 m 3 /(kg s 2 )]、单位体积吉布斯自由能、质量通量 g 比吉布斯自由能 H 焓 H 单位体积焓 h 比角动量、比焓、高度、普朗克常数 [6.626 x 10 − 34 Js] I 冲量、转动惯量、电流 I sp 比冲量 i 倾角 J 2 非球形地球纬向谐波(1.0826 x 10 − 3 ) j 电流密度 K 燃烧表面积与喷嘴喉口面积比 K c 基于浓度的平衡常数 K p 基于分压的平衡常数 KE 动能 k 等效弹簧常数 kb 反向反应速率、玻尔兹曼常数 [1.380 x 10 23 J/K]
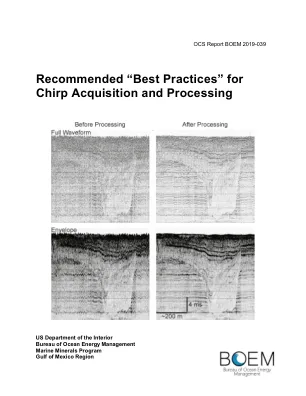
推荐CHIRP获取和处理的“最佳实践”
chirp声音反射系统,有时称为子底剖面,是对海底或湖床下沉积物的超高分辨率(〜十分尺度)成像的宝贵工具。chirp是一种由雷达社区开发的信号处理技术,用于改善回声回报的分辨率(Klauder等,1960)。该技术后来由声纳社区改编(Schock等,1989)。CHIRP信号是一种扫描的频率脉冲,通常在5-30毫秒(MS)之间,其频率在0.5 kHz到24 kHz之间,具体取决于传感器。CHIRP信号处理的基本特征是匹配过滤器(即应用反向卷积),带有已知的即将脉冲函数的返回信号,从理论上讲,该信号将从较长且复杂的声纳脉冲中崩溃,从近距离突击的响应中崩溃。chirp数据是在及时获得的,其中z轴是从chirp到反射器(具有声音响应的海底或更深层的层)的行程,然后返回chirp(双向时间或TWT)。一些CHIRP采集系统会根据水中假定的声速自动显示具有深度Z轴的数据(例如,每秒1500米);但是,记录的数据始终在TWT中。 水平轴是基于每个声纳ping的GPS导航,将其转换为沿调查轨道的距离。每秒1500米);但是,记录的数据始终在TWT中。水平轴是基于每个声纳ping的GPS导航,将其转换为沿调查轨道的距离。

关于硝酸盐盐和普罗尼克离子液体混合物的物理特性
我们报告了一项系统的研究,该系统研究盐浓度及其阳离子价对模型的混合物的多种等分和转运性能,其混合物具有单价(Lino 3)的硝酸盐(lino 3),二价(mg(no 3)2和Ca(no 3)2和Ca(no 3)2)和(no 3)3)salts。由适当的实验技术确定的这些特性包括密度,声速,折射率,表面张力,电导率和粘度。单粒子动力学和径向分布函数也通过分子动力学模拟进行了分析。在Vogel-Fulcher-Tammann框架中研究了电导率的温度依赖性,我们获得了有效的激活能量,脆弱性指数和Vogel温度。此外,我们进行了高温Arrhenius分析,并计算了电导率和粘度的激活能。最后,获得了不同混合物的分数Walden规则的指数,并分析了系统的离子和脆弱性,证明所有混合物都是亚离子和脆弱的。在其第一个溶剂化壳中建立的由添加盐的阳离子和硝酸盐阴离子组成的长寿命阴离子聚集体的氢键网络的变形以及长寿命的阴离子聚集体的形成是对分析特性产生的深影响。细节分析了盐阳离子的表面电荷密度对溶液的结构和运输特性的作用,并与离子液体极性纳米孔(纳米结构溶剂化)中盐物质的溶剂化有关。2022作者。由Elsevier B.V.这是CC BY-NC-ND许可证(http://creativecommons.org/licenses/by-nc-nd/4.0/)下的开放访问文章。

泰坦声学:模拟室内的声音传播...
简介。泰坦大气层与其表面之间的联系是独一无二的:它处于各种表面 - 大气过程的起源 - 液态甲烷流,波浪,降雨[1],沙丘运动,盐酸[2],尘埃[3]和雨暴风雨[4] - 在表面改变和大气动力学中都起着重要作用。有趣的是,泰坦的大气足以传播这些现象产生的声波。因此,可以通过记录其声学特征来定量和远程研究它们。的确,在板上毅力上具有超级骑士麦克风[5]的火星上已经证明了声学研究的巨大潜力[5],其中几个结果记录了近地面现象,例如湍流[6,7],风[8],尘埃[9]。但在泰坦上,由于声音传播条件的增强,这种潜力甚至更大:冷(〜90 K)和厚(〜1.5 bar)的表面大气(95%n 2,〜5%CH 4 [10])可以在长距离上维持声波,并吸收相对较低(见表。1)与火星或地球相比[11]。这种有利的环境激发了声学特性仪器赛车仪(API-V)在船上的船上载体下降模块,该模块成功地估计了下降期间和通过测量声速降落后的相对甲烷分数[12]。在2030年代中期,蜻蜓任务将探索赤道撞击火山口附近的泰坦,并带有可重新定位的旋翼飞机登陆器[13]。关键的地球物理和气象测量将由Dragmet套件(包括三个麦克风)组成的Dragmet Package提供[14]。为准备泰坦的声学探索,本研究旨在建模泰坦大气条件中的声音传播,以便能够估计水平

带有金属增强对流信封的太阳能模型&
中微子通量的标准太阳模型预测与观察到的速率已有三十多年(Bahcall 1989)之间存在差异。首先提出了低Z模型,以减少预测的太阳中微子通量(Bahcall&Ulrich 1971)。与标准模型相反,低Z模型考虑了太阳化学分层的可能性。一颗星星可能在Hayashi阶段演变后捕获一些星际物质(Joss 1974)。对于在其植物圈以下的对流区域的太阳情况下,降落物质将被混合到整个对流区。由于星际尘埃的金属丰度远高于太阳能材料的金属丰度,因此太阳能对流区将通过重元素增强。低Z模型可以提供相当低的中微子通量,但通常会导致对流区和非常低的初始氦气丰度。此外,太阳能内部的Cal占P模式振荡频率和声速与观察值不符(Christensen-Dalsgaard,Gough和Morgan 1979; Christensen-Dalsendalsgaard&Gough 1980; Bahcall&Ulrich&Ulrich 1988)。因此,近年来,低Z模型被认为是不现实的,并且越来越多的作者更喜欢具有元素扩散的标准太阳能模型(Bahcall&Pinneneult 1992; Bahcall,Pinsonneault,&Wasserserburg 1995; Bahcall,Bahcall,Basu和Pinsonneault 1998)。然而,许多证据证实,即使没有以前的低Z模型所需的太多,太阳包膜已受到行星际材料的污染。因此,我们使用更新的输入物理学研究了包络金属的中等增强,并将我们的注意力集中在太阳中微子问题上,而是太阳的结构和P模式振荡。

在战略海峡部署声呐浮标和声音监视系统,以支持印度尼西亚群岛国家的水下防御系统
摘要 :ALKI 水域是印度尼西亚的战略海峡,具有复杂的特性,容易受到外国船只的渗透。目前,印尼海军仍然注重海平面安全,而随着当今技术的进步,许多外国潜艇正在利用水下区域实施跨国犯罪。被利用的水面下的区域是阴影区,有可能成为潜艇的藏身之处。阴影区是一个安全区,其中层的温度和盐度反映了传入声波的传播,因此潜艇可以避免被声纳探测到。本文旨在通过安装声纳浮标和声音监视系统 (SOSUS) 来监视进入印尼领土的外国潜艇的动向,尤其是通过战略海峡,为使用声学层析成像技术提供替代解决方案。本研究采用混合方法,处理受访者问卷中的定量数据,这些数据涉及使用分析网络过程 (ANP) 和检测概率理论方法确定声纳浮标放置坐标的标准和替代方案。为了处理定量数据(阴影区和潜艇探测),研究人员使用抛物线方程法模拟和建模了 SOSUS 的声波传播,该方法使用 MATLAB 和 Act up v.2.2L 工具箱进行处理,并处理来自专家访谈的定性数据以完成定量数据。研究结果表明,获得了声呐浮标的最佳放置优先级和数量。通过关注温度、盐度和声速等水文海洋数据,优化了声波传播模拟。它还通过固定声纳阵列操作的概念获得了 SOSUS 的放置位置和数量,希望能够了解阴影区并检测外国潜艇,以支持印度尼西亚群岛的水下防御系统
研究报告 - LNE
2018 年国际单位制 (SI) 进行全面修订时,温度单位开尔文的定义发生了变化。到目前为止,开尔文被定义为水三相点温度的分数,换句话说,是来自物质制品。现在它基于温度的微观定义,即测量物体原子的热扰动,与其成分的化学性质无关,通过玻尔兹曼常数 k 与温度相关。然而,在实践中,科学家和工业家使用特定的参考来测量温度。因此,国际温标 ITS-90 基于所考虑的温度范围的不同参考点:各种气体的三相点、金属的凝固点等。这些点之间使用复杂的插值公式来覆盖整个温标。如果要长期用新系统取代旧系统,那么平稳进行这一过渡至关重要,这不仅出于经济原因,也为了确保旧措施的可持续性。因此,计量学家经过多年的重要工作,建立了现行标度和新的热力学温度定义之间的对应关系。对于 LNE-Cnam 研究人员来说,这项大约十年前开始的庞大工程以多个连续的欧洲项目的形式出现,其中第二个项目 InK2 于去年结束。在此背景下,专家们开发或改进了几种绝对温度测量方法,并将其应用于整个温度范围。因此,在 5 K 到 200 K 的范围内,他们的测量基于声学温度测量装置,从而可以将气体中的声速与气体的热力学温度联系起来。然后将获得的结果与连接到 EIT-90 的温度计给出的结果进行比较。 LNE-Cnam 研究工程师 Fernando Sparasci 解释道:“为这些比较和测量玻尔兹曼常数而设立的这项实验已达到相当成熟的水平,我们已将我们的设备出口到世界各地的七个计量实验室,这是一个独特的案例。”与此同时,LNE-Cnam 的物理学家与中国科学院理化所的中国同事在实验室框架内合作
![arXiv:2207.11913v2 [physics.app-ph] 2022 年 9 月 22 日](/simg/8\80b88ce3d09b91dce45e94d7eaaca1da899de7a4.webp)
arXiv:2207.11913v2 [physics.app-ph] 2022 年 9 月 22 日
量子信息技术中必不可少的量子器件是在硅或蓝宝石晶片上制造的。最近的研究发现,晶片中的声学模式可以在量子态操控中发挥重要作用,包括声学和量子比特态之间的交换操作,从而导致冷却 1,2。声学模式由晶片上制备的压电换能器产生。这通常是材料声学研究最常用的方法,其中电极与换能器粘合,而换能器与感兴趣的样品直接接触。换能器对振荡电压的压电响应将电磁信号转换为机械振荡。在某些情况下,让电极或换能器与样品物理接触是不可取的或不切实际的。在这里,我们展示了一种用于产生和测量材料中声学共振的非接触式技术。Dobbs 3 描述了使用螺线管和静磁场在金属中产生声学共振。电磁信号与机械振动之间的耦合是通过磁场产生的洛伦兹力实现的,从而无需使用压电材料。洛伦兹力发生在金属表面或射频 (RF) 穿透深度内,从而在体内产生声学模式。通过这种方法,我们研究了硅晶片中的高谐波声学模式,精确测量了纵向和横向声速并计算了相应的弹性常数。我们的样品是一块 [001] 单晶硅晶片,一侧覆盖有 Nb 薄膜。样品从最初直径为 15 厘米的商用晶片上切割下来,尺寸为 4mmx 4mmx 330 µ m(浮区,电阻率 > 10,000 Ωcm)。本文详细描述的结果针对的是厚度为 155 nm 的 Nb 薄膜,由 Rigetti Computing 采用高功率脉冲磁控溅射 (HiPIMS) 制备。高达 14 T 的高磁场敏感度测量