XiaoMi-AI文件搜索系统
World File Search System处理软件
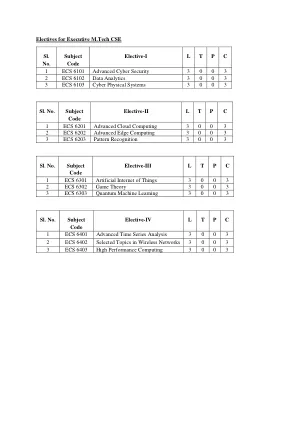
高级技术硕士 CSE 选修课
课程编号 ECS 6103 课程学分 LTPC:3-0-0-3 课程名称 网络物理系统 学习模式 在线 学习目标 学习如何建模和设计软件、网络和物理过程的联合动力学。, 培养实现安全、可靠、高效利用资源的嵌入式系统的技能。, 学会批判性地思考可用于实现这种联合动力学的技术。 课程描述 本课程将概述网络物理系统的建模、构建和分析方法。 课程大纲 计算模型:有限状态机、线程、常微分方程、混合系统、参与者、离散事件、数据流 基本分析、控制和系统仿真:双仿真、可达性分析、控制器合成、近似连续时间系统。与物理世界的交互:传感器/执行器建模和校准、处理多个实时流的并发性、处理软件中的数值不精确性 映射到嵌入式平台:实时操作系统、执行时间分析、调度、并发性 分布式嵌入式系统:协议设计、可预测网络、安全性 学习成果 1. 对网络物理系统的基本了解 2. 培养实现安全、可靠、高效利用资源的嵌入式系统的技能,3. 学会批判性地思考可用于实现这种联合动态的技术。 评估方法 测验/作业/ESE 推荐阅读:
ANI 宣传册 2023
使用 ANI 的 NeuroNavigator,现在可以动态地看到从头皮一直到下皮质区域的大脑电活动。可以以绝对值和 z 分数(基于 ANI 的新 swLORETA 数据库)映射电位。易于使用、直观的工具允许您:• 使用易于使用的 xyz 光标切片大脑• 通过输入坐标导航到特定的 Brodmann 区域• 在可重定位的 z 分数面板中快速查看不正常的 Brodmann 区域• 只需单击鼠标即可将所有图像和/或值粘贴到所需的文字处理软件中• 可视化与症状检查表的症状相关的网络和 Brodmann 区域。包括症状检查表的所有选项。 • 打开 Atlas 功能以查看所显示网络的 Brodmann 区域的边界 • 轻松更改配色方案、比例、正常范围、头部模型透明度以及更多显示功能,以增强对基础数据的视图。 • 查看特定频率的所有切片,或将频率折叠为波段(即 delta、theta 等) • 向下钻取,从头皮电位开始到下皮层和小脑层。 NeuroNavigator 现在包括杏仁核、丘脑下部、丘脑、海马、蚓部、红核、伏隔核和小脑。 • 查看功能和有效连接以及相位重置测量值(原始分数和 z 分数)。 • 查看大脑和/或连接组的功能连接。 • 自动为 NeuroGuide 准备 sLORETA 或 swLORETA 反馈协议文件。 • 将中心体素值和连接测量值输出为文本文件。 ... 还有更多
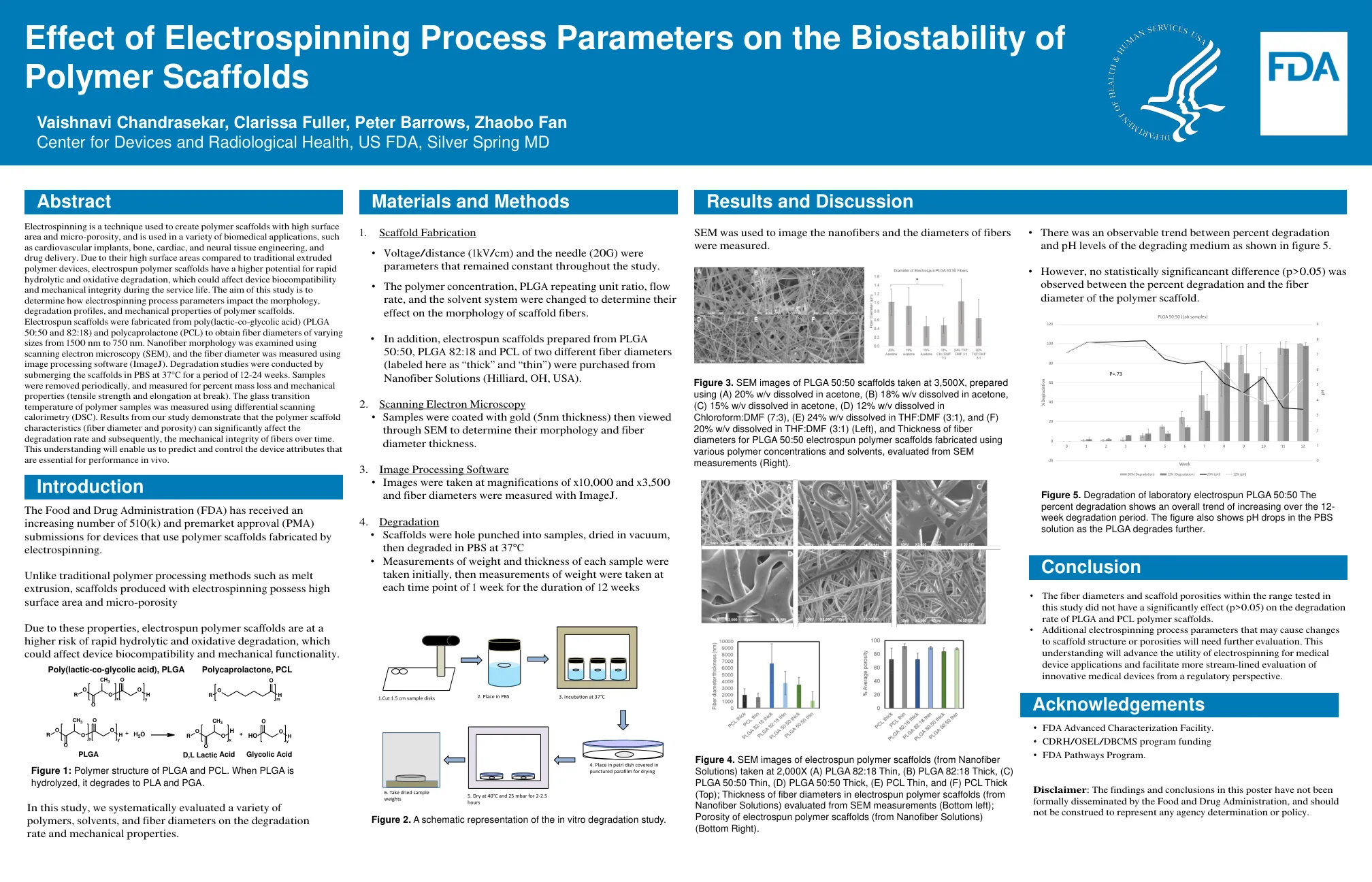
静电纺丝工艺参数对聚合物支架生物稳定性的影响
静电纺丝是一种用于制造具有高表面积和微孔隙率的聚合物支架的技术,可用于各种生物医学应用,例如心血管植入物、骨骼、心脏和神经组织工程以及药物输送。与传统的挤压聚合物设备相比,静电纺丝聚合物支架具有较高的表面积,因此更容易发生快速水解和氧化降解,这可能会影响设备在使用过程中的生物相容性和机械完整性。本研究旨在确定静电纺丝工艺参数如何影响聚合物支架的形态、降解曲线和机械性能。静电纺丝支架由聚(乳酸-乙醇酸共聚物)(PLGA 50:50 和 82:18)和聚己内酯 (PCL) 制成,以获得从 1500 nm 到 750 nm 不等的纤维直径。使用扫描电子显微镜 (SEM) 检查纳米纤维形态,并使用图像处理软件 (ImageJ) 测量纤维直径。通过将支架浸入 37°C 的 PBS 中 12-24 周来进行降解研究。定期取出样品,测量质量损失百分比和机械性能(拉伸强度和断裂伸长率)。使用差示扫描量热法 (DSC) 测量聚合物样品的玻璃化转变温度。我们的研究结果表明,聚合物支架特性(纤维直径和孔隙率)可以显著影响降解率,进而影响纤维随时间变化的机械完整性。这种理解将使我们能够预测和控制对体内性能至关重要的设备属性。
用于远程建筑检查和监控的无人机系统
摘要 本文报告了弗劳恩霍夫 IZFP 进行的一项调查,其中旋翼八旋翼微型飞行器 (MAV) 系统用于扫描建筑物,以使用高分辨率数码相机进行检查和监控。MAV 配备了基于微控制器的飞行控制系统和不同的传感器,用于导航和飞行稳定。照片以高速度和高频率拍摄,并存储在机上,然后在 MAV 完成任务后下载。然后将拍摄的照片拼接在一起,以获得完整的 2D 图像,其分辨率允许在毫米范围内观察到损坏和开裂。在后续步骤中,开发了一种图像处理软件,可以专门过滤掉开裂模式,这些模式可以在未来的步骤中从统计模式识别的角度进一步分析。引言民用基础设施建筑数量的增加已成为其老化过程和生命周期管理的一个问题。监测这些建筑物状况的传统方法是仅通过人工目视检查,可能还需要一些抽头测试。这种监测方式主要提供有关混凝土或石材结构开裂情况和可能脱落的覆盖层的完整信息。当考虑大坝、冷却塔、教堂或甚至简单的多层建筑的结构时,提供这些信息所需的努力可能会变得费力,因为检查需要大量的起重设备。一种规避这种努力的方法是使用无人驾驶飞行器 (UAV) 以及甚至小型的微型飞行器 (MAV) 作为机载传感器系统来捕获所需的数据。这种无人机在无损检测 (NDT) 中的潜在应用 _____________

基于表面肌电图的平台,用于评估肌肉减少症
Andrea Caroppo, Gabriele Rescio, Alessandro Leone, Pietro Siciliano National Research Council of Italy - Institute for Microelectronics and Microsystems Via Monteroni, c/o Campus Università del Salento, Palazzina A3, Lecce, Italy email: andrea.caroppo@cnr.it email: gabriele.rescio@cnr.it电子邮件:alessandro.leone@cnr.it电子邮件:pietro.siciliano@le@le.imm.cnr.it摘要 - 肌肉减少症是一种疾病,其特征是失去肌肉质量和肌肉力量。它与自然衰老过程以及老年医疗状况和床休息有关。因此,从医学的角度来看,可以定期监测患有肌肉减少症风险的患者,以通过客观和特定的指标来早日检测其发作或进展,这是非常有益的。在过去的几年中,表面肌电图(SEMG)越来越多地在该研究领域的预防,诊断和康复中起着重要作用。此外,EMG技术的最新进展允许开发低侵入性且可靠的基于智能EMG的可穿戴设备。本文介绍了一个集成平台的设计和实现,该平台包括基于SEMG的可穿戴设备以及与用于病理学临床监测和管理的处理软件的接口。该系统旨在随着时间的推移而进行预防(早期诊断)和监测患者病情的目的。在这里,我们介绍了有关开发的肌肉减少症管理平台的可行性的初步研究。具体而言,这项工作涉及鉴定EMG信号的采样频率与EMG信号中提取的高度歧视特征的差异之间的最佳权衡,以自动测量肌肉折叠术。

高保真电光空间域意识场景模拟器
航空航天已经开发了高保真的太空领域意识(SDA)场景模拟器,为基于地面和空间的电光传感器提供现实的太空监视场景,以在从概念开发到操作到操作以及评估任务数据处理Algorithm和其他数据Pipeelines的所有阶段中的利益相关者为利益相关者提供模拟图像。我们使用传感器 - 目标参与方案构建场景,该场景在添加适当的背景,恒星,目标和噪声组件的同时对场景的频段辐射指定进行建模。场景模拟器使用恒星目录,包括超过十亿星的Gaia目录,将它们准确地放入图像中,并准确地表示其颜色校正的带有带有的亮度降低至22级。模拟器使用其他已发表的数据来对银河系平面中的黄道光和未解决的恒星的自然天空亮度进行建模。此外,由于未拒绝的杂散光而产生的较高背景是基于实验室和轨道测量结果注入诸如宇宙射线之类的时间背景效应。模拟器可选地包含了电流传感器偏置结构和噪声源的实验室测量,例如深电流,读取噪声和其他时空传感器噪声的来源。由模拟器创建的高保真场景目前用于降低风险,指导技术开发并为多个程序提供操作范围,以确保传感器硬件性能和数据处理软件将满足任务需求和要求。航空航天可以通过任何传感器观察操作概念(CONOPS)模拟场景,场景中的目标可以以任何忠诚度建模,从简单的漫不好物球体到高保真计算机辅助设计(CAD)模型,呈现出具有现实的双向反射率分配功能(Brundfs)和摄取复杂的效果。

使用人工智能进行牙科模拟治疗的艺术
背景:在日常实践中,患者经常询问前牙美容手术会如何影响他们的笑容。当试图得到合理而明确的答复时,牙医将使用图像和图片处理工具对笑容图片进行复制,以复制预期的治疗改变。DTS PRO 是同一软件类别中易于使用的工具,它提供了多种工具,临床医生可以使用这些工具在微笑图像上以数字方式显示潜在的修复体。方法:本文旨在解释使用 DTS PRO 版本 15.9 对 60 名参与者(20 名患者、20 名牙医和 20 名技术人员)进行前牙美容治疗的美容修复数字模拟的程序和内容。预期修复包括贴面、牙齿美白、数字化微笑设计、正畸牙齿移动、粘接、龈切除术和 CLP、缺失牙齿的替换以及正畸/正颌手术后的口外变化。结果:针对前牙设计的修复工作模拟技术往往是增强牙医、患者和实验室之间联系的有效方法。根据所选程序,使用各种方法来执行此类方法。了解牙科摄影和图像的简单处理、处理软件是有效模拟的基本要求。结论:所使用的由人工智能驱动的软件可在各个数字工作流程阶段协助临床医生,并在患者接受治疗方案之前提供有关数字技术改进和进步的指导。临床意义:临床医生、患者和技术人员可以使用三维跨学科模型来查看每个牙科手术如何影响后续治疗。通过这种治疗计划策略,美容牙科、正畸、种植、牙周病学和口腔颌面外科等各种过程的预期性得到了提高,患者的意识和满意度也得到了提高。

满足机载精度挑战...
成功的机载激光雷达测深仪的基本素质是精度、能力和成本效益。在过去的二十五年里,激光、光学、电子和计算机的发展使得构建具有不同用途的可行机载激光雷达系统变得更容易,而且正在构建的数量也在不断增加。然而,由于需求有限,而且仍然很难满足上述三个要求,尤其是第一个要求,目前世界上只有不到十台机载激光雷达测深仪。从系统中获取答案并不难。然而,要获得符合国际精度标准和典型客户操作要求的结果,需要大量的理解和努力。机载测深仪的设计、构造和操作的主要考虑因素必须是数据质量和深度测量精度。物理环境和系统硬件组件都会产生许多必须克服的错误源。这需要周到的硬件和软件系统设计和构建,以及预测、建模和应用适当的校正器。必须建立并遵循质量控制、校准和维护的操作程序。在本文中,我们描述了已开发的大量硬件设计功能、软件算法、偏差校正器、显示器和操作程序,为满足所需精度标准同时保持效率和成本效益的系统提供了基础。上述功能都已纳入美国陆军工程兵团 SHOALS 作战机载激光雷达测深系统。SHOALS 可通过直升机和固定翼飞机进行操作,以满足各种类型的测量要求,例如制图、疏浚、海岸工程、资源管理、建模和侦察。尽管 SHOALS 硬件是十年前设计的,但该设计已被证明是最佳的,经过七年的成功实地操作,涵盖了广泛的赞助商、要求、全球各地的位置和环境条件。SHOALS 飞行后数据处理软件套件提供了高精度、完美运行,并定期升级以提高实用性和效率。事实证明,整个系统设计非常灵活,并且根据客户要求在硬件和软件中添加了许多新特性和功能。在本文中,我们将描述硬件和软件设计理念以及关键的设计考虑因素。我们详细讨论了如何克服大量潜在或已实现的误差源,这些误差源通常存在于机载激光雷达水文系统中,特别是 SHOALS 中。
满足机载精度挑战...
成功的机载激光雷达测深仪的基本素质是精度、能力和成本效益。在过去的二十五年里,激光、光学、电子和计算机的发展使得构建具有不同用途的可行机载激光雷达系统变得更容易,而且正在构建的数量也在不断增加。然而,由于需求有限,而且仍然很难满足上述三个要求,尤其是第一个要求,目前世界上只有不到十台机载激光雷达测深仪。从系统中获取答案并不难。然而,要获得符合国际精度标准和典型客户操作要求的结果,需要大量的理解和努力。机载测深仪的设计、构造和操作的主要考虑因素必须是数据质量和深度测量精度。物理环境和系统硬件组件都会产生许多必须克服的错误源。这需要周到的硬件和软件系统设计和构建,以及预测、建模和应用适当的校正器。必须建立并遵循质量控制、校准和维护的操作程序。在本文中,我们描述了已开发的大量硬件设计功能、软件算法、偏差校正器、显示器和操作程序,为满足所需精度标准同时保持效率和成本效益的系统提供了基础。上述功能都已纳入美国陆军工程兵团 SHOALS 作战机载激光雷达测深系统。SHOALS 可通过直升机和固定翼飞机进行操作,以满足各种类型的测量要求,例如制图、疏浚、海岸工程、资源管理、建模和侦察。尽管 SHOALS 硬件是十年前设计的,但该设计已被证明是最佳的,经过七年的成功实地操作,涵盖了广泛的赞助商、要求、全球各地的位置和环境条件。SHOALS 飞行后数据处理软件套件提供了高精度、完美运行,并定期升级以提高实用性和效率。事实证明,整个系统设计非常灵活,并且根据客户要求在硬件和软件中添加了许多新特性和功能。在本文中,我们将描述硬件和软件设计理念以及关键的设计考虑因素。我们详细讨论了如何克服大量潜在或已实现的误差源,这些误差源通常存在于机载激光雷达水文系统中,特别是 SHOALS 中。
自动扣除安全性嵌入式软件
嵌入式系统在社会中无处不在,在许多行业(例如汽车行业)中,嵌入式系统至关重要。嵌入式系统也越来越受软件控制,例如自动驾驶的进步。因此,自然需要方法来确保此类软件的正确性,以及流程和框架来处理软件的尺寸和复杂性不断增加。基于合同的设计是嵌入式系统设计中建立的良好设计方法,其中通过使用合同来管理嵌入式系统的复杂性,以将责任分配给系统的不同组件。本文遵循了基于合同设计的原则,提出了正式的合同框架或理论。该理论是为程序软件开发的,并在语义层面上定义,从而使其可以通过不同的语言实例化以定义合同和组件,具体取决于适用于不同用途的内容。该理论在语义领域上是参数,允许对不同类型的行为进行推理。论文还提出了该理论的不同实例,既显示了使用Hoare Logic或acsl可以指定低级特性,又显示了使用TLA+等时间逻辑的高级时间属性。该理论还允许组合不同的语义域。在理论中,可以根据其合同的合同来验证低级组件,以至于当组成组件时,可以确保更抽象的高级特性。验证低级软件正确性的常见方法是演绎验证,而Frama-C是一个众所周知的框架,可以在其中执行C代码的脱位验证。本文还以一种工具的形式介绍了合同推断领域的工作,其中可以自动生成用于验证的工具合同。该方法使用C模型Checker Tricera作为后端,并输入用于Frama-C的合同。最后,论文还提出了程序仪器的框架,这使某些属性更容易验证。在这里,对通常难以验证的属性的主张的程序被转换为新程序,并以不包含这些宗教信仰的断言,以至于如果新程序正确,那么原始程序也正确。论文为所谓的扩展量词提供了混凝土仪器,这是阵列上的一种聚合,例如在数组中找到所有值的总和或最大值的总和。