XiaoMi-AI文件搜索系统
World File Search System外设

CANflict:利用外设冲突对汽车网络进行数据链路层攻击
当前汽车领域的研究已经从安全角度证明了控制器局域网 ( CAN ) 协议的局限性。应用层攻击涉及创建恶意数据包,被认为可以从远程进行,但可以被现代入侵检测系统 ( IDS ) 轻松检测到。另一方面,较新的链路层攻击更隐蔽,可能更具破坏性,但需要物理访问总线。在本文中,我们介绍了 CANflict,这是一种纯软件方法,允许从未修改的微控制器在数据链路层可靠地操纵 CAN 总线,克服了最先进工作的局限性。我们证明可以从远程受感染的 ECU 部署隐秘的 CAN 链路层攻击,目标是同一 CAN 网络上的另一个 ECU。为此,我们利用微控制器外设之间存在的引脚冲突来制作多语言帧,这允许攻击者在位级别控制 CAN 流量并绕过协议规则。我们通过实验证明了我们的方法在高端、中端和低端微控制器上的有效性,并通过发布一个可扩展的工具为未来的研究奠定了基础,该工具可用于在不同平台上实现我们的方法并在数据链路层构建 CAN 对策。

图形应用程序入门 |瑞萨
1. 第一步通常涉及收集应用需求并执行高级系统设计,将需求映射到一组硬件组件上。组件是满足这些需求所必需的,包括设计中将使用的目标 MCU、构建/调试应用程序所需的工具链等等。 2. 下一步通常确定使用目标 MCU 的哪些板载外设。在此步骤中,通常需要花费大量时间来了解板载外设的寄存器映射,并编写将外设暴露给上层应用程序代码所需的低级驱动程序代码。大部分工作已经在 FSP 中完成,大大简化了应用程序开发。 3. 除了目标 MCU 的板载外设外,设计通常还包括外部硬件及其控制方式。例如,EK-RA6M3G 具有图形扩展板,它由 RA6M3 MCU 的片上图形 LCD 控制器 (GLCDC) 直接控制。 4. 最后一步通常详细说明如何在所选硬件之上构建应用程序以满足初始要求。图形应用程序要求首先映射到 EK-RA6M3G 套件的板载外设。图 4 显示了图形应用程序使用的所有内部硬件外设。本应用说明介绍了这些外设中的每一个是如何 c

ZSB101A-EVB 用户手册
1.1 ZSB101A 芯片简介 .................................................................................................. 1 1.1.1 芯片概述 ........................................................................................................... 1 1.1.2 芯片特性 ........................................................................................................... 1 1.1.3 芯片工作条件 ................................................................................................... 1 1.2 ZSB101A-EVB ......................................................................................................... 2 1.2.1 系统电源电路 ................................................................................................... 2 1.2.2 USB 转 TTL 电路 ............................................................................................. 3 1.2.3 板载外设说明 ................................................................................................... 3 1.2.4 其他功能使用说明 ........................................................................................... 5 1.3 ZSB101A-EVB 电气特性 ........................................................................................ 7 1.3.1 电源电气特性 ................................................................................................... 7 1.3.2 I/O 电气特性 .................................................................................................... 7 2.评估板测试使用 ....................................................................................................... 8
实验室实习嵌入式系统
1.1 硬件................................................................................................................................1 1.2 软件................................................................................................................................3 1.3 替代开发环境....................................................................................................................4 2 动机............................................................................................................................................5 3 使用 STM32 外设.......................................................................................................................6
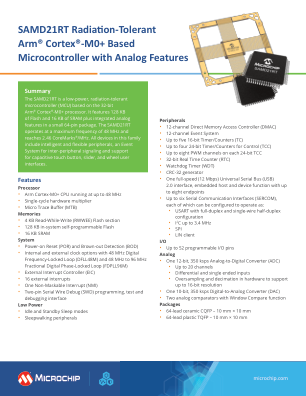
SAMD21RT 销售表
SAMD21RT 是一款基于 32 位 Arm ® Cortex ® -M0+ 处理器的低功耗、耐辐射微控制器 (MCU)。它具有 128 KB 闪存和 16 KB SRAM,以及集成的模拟功能,采用小型 64 引脚封装。SAMD21RT 的最大工作频率为 48 MHz,达到 2.46 CoreMarks ® /MHz。该系列中的所有设备都包括智能灵活的外设、用于外设间信号传输的事件系统,并支持电容式触摸按钮、滑块和滚轮用户界面。
UG_CMT453x SDK 使用指南
Cortex 微控制器软件接口标准(CMSIS)是 Cortex-M 处理器系列独立于供应商的硬件抽象层。CMSIS 提供了内核与外设、实时操作系统和中间设备之间的通用接口。

如何使用 SAMRH71 Space Wire 外围设备
Space Wire 框图包含以下内容: • 2 x LVDS 链路:用于与 Space Wire 网络进行通信 • 三个主连接,用于 Space Wire 外设与芯片其余部分(处理器、内存和外设)之间的通信 – Rx1 用于接收 Space Wire 帧 – Tx1 用于传输 Space Wire 帧 – 远程内存访问协议 (RMAP) 用于接收 RMAP 命令。如果满足配置条件,它会自动接受命令并发送回复(如果请求) • 内部路由器将 Space Wire 数据包从源(SpaceWire 链路、RMAP 和发射器)重定向到目标(SpaceWire 链路、RMAP 和接收器) • TCH 块支持 Space Wire 时间码帧

数字信号处理器简介
后来,为了提高性能以及开拓新市场,微处理器制造商对其设计进行了专门化。第一个微控制器,即德州仪器的 TMS1000,于 1974 年推出。微控制器不仅在硅片上拥有 CPU,还集成了许多外设(内存、并行端口、模拟数字转换器等)。本质上,它们构成了集成在同一硅片上的完整微型计算机。在核心 CPU 上添加外设使微控制器在必须保持低成本、小尺寸和低功耗的嵌入式系统应用中特别高效。例如,微波炉控制单元是 TMS1000 微控制器的首批目标应用之一。20 世纪 80 年代,英特尔推出了 8748 微控制器系列。该系列集成了许多外设,包括可由开发人员擦除和重新编程的程序存储器。这些特性降低了微控制器系统的开发成本,并使得微控制器可以在小批量嵌入式应用中使用。
使用 ... 设计和实现 Ahb 到 Apb 桥接器
I. 引言 随着嵌入式系统变得越来越复杂,高速和低功耗组件之间的有效通信变得至关重要。ARM 的 AMBA(高级微控制器总线架构)协议提供了一个标准化框架来满足这一要求。在 AMBA 中,高级高性能总线 (AHB) 支持快速数据传输,而高级外设总线 (APB) 则专注于外设的低功耗操作。为了确保这两条总线之间的无缝交互,可靠的桥接对于高效的数据传输和系统集成是必不可少的。本研究以使用 Verilog 设计和实现 AHB 到 APB 桥接为中心。该桥接促进了高性能处理器和低功耗外设之间的互操作性,旨在优化性能并最大限度地减少延迟,同时遵守 AMBA 标准。严格的验证方法确保了其在不同用例中的可靠性,解决了总线通信中的关键挑战,并促进了嵌入式系统设计的进步。