XiaoMi-AI文件搜索系统
World File Search System外部负载
TDA8702 8位视频数模转换器
4.最坏情况特性是在输入代码从 0 转换到 255 时获得的,并且如果在 V OUT 或 V OUT 与 V CCA 之间连接了大于 75 Ω 的外部负载阻抗。已使用有源探头在 V OUT 与 AGND 之间测量了指定值。V OUT 与 AGND 之间未施加其他负载阻抗。所有输入数据均在时钟的上升沿锁存。在时钟的高电平(CLK = 高电平)期间,输出电压保持稳定(与输入数据变化无关)。在时钟从低电平转换到高电平(CLK = 低电平)期间,DAC 以透明模式运行(输入数据将直接传输到其相应的模拟输出电压(见图 5)。
NAVMC 3500.14E 变更 1.pdf
1.2.6 资源。核心能力资源模型 (CCRM) 是一种定性分析工具(模型),可显示获得和维持训练/战斗能力所需的外部资源。该工具客观地捕获并显示战备所需的外部资源。外部资源定义为不属于单位的资源(例如飞行小时数、模拟器小时数、学术小时数、弹药、靶场、目标、外部负载、直升机支援团队 (HST) 和侵略者空中资源)。CCRM 的飞行小时模块主要开发用于航空副司令 (DC AVN) 级别,作为飞行小时计划预算支持工具,并由海军作战部长和海军陆战队司令认可。在单位级别,它可以补充基于出击的训练计划 (SBTP),协助单位确定训练单位达到核心能力所需的飞行小时资源。
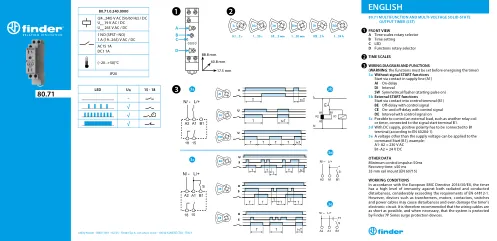
英语
接线图和功能(警告:必须在定时器通电前设置这些功能) 3a 无信号启动功能 通过电源线中的触点启动(A1) AI 接通延迟 DI 间隔 SW 对称闪光器(启动脉冲开启) 3b 外部启动功能 通过控制端子(B1)中的触点启动 BE 带控制信号的断开延迟 CE 带控制信号的接通和断开延迟 DE 带控制信号的间隔 3c 可以控制连接到信号启动端子 B1 的外部负载,例如另一个继电器线圈或定时器。 3d 使用直流电源时,必须将正极连接到 B1 端子(根据 EN 60204-1)。 3e 可以将电源电压以外的电压施加到启动命令(B1),例如: A1-A2 = 230 V AC B1-A2 = 24 V DC

me 726断裂力学(3个学分)春季2024
断裂力学是经典工程机制的一个分支,它涉及应力场和外部负载下破裂固体的裂纹生长标准。该课程涵盖了断裂力学和故障标准的基本概念,线性弹性断裂力学(LEFM),弹性塑料断裂,金属,聚合物,陶瓷和复合材料的断裂,以及机制,例如J-Integral和CoD,例如J-Integral和CoD,以测量破裂的严重程度。疲劳裂纹生长机制,微裂纹以及如何发展和控制裂纹是过程的一部分。将涵盖如何使用有限元素,多尺度断裂力学和不同尺度上的断裂来评估断裂参数的计算方案。课程目录:线性弹性断裂力学(LEFM),能量释放速率,压力强度因子,非线性断裂力学,J构成,弹性塑料骨折,裂纹尖端可塑性,裂纹繁殖,裂缝繁殖,裂缝疲劳裂纹的生长,裂缝裂纹测试,裂纹测试,裂纹和组合材料和组合材料,较稳定性,更稳固,强化。课程目的:
实施指南航空管理、运营...
1. 能源部航空计划概述:政府飞机用于支持四大核心计划:能源安全、核安全、科学发现与创新和环境责任 [能源部 2006 年战略计划]。支持这些计划的飞机运营类型包括:货物、危险材料和人员运输;空中巡逻,如管道、电力线和安全;航空摄影;研究与开发;航空勘测,如大气、生物、环境和放射性评估;航空应用;用于施工、勘测或退役活动的旋翼机外部负载操作。此外,能源部拥有、运营或使用无人驾驶飞机 (UA) 系统 (UAS)。UA 是飞机 [Title 14 CFR Part 1],以前被称为无人驾驶飞行器 (UAV) 或遥控飞机 (ROA)。UAS 用于大气研究、传感器开发或用于验证操作概念的研究和开发,以支持核安全和科学计划。此外,能源部还使用不同数量的商业航空服务(租赁、合同、租用和包机)飞机。航空作业范围从使用单架飞机到涉及多架飞机的复杂任务。
紧张圆顶的定性和定量分析
摘要。纸张涉及钢圆顶有关的特殊结构,称为张力。紧张的特征是自我压力状态的发生。其中一些的特征是存在于有限的机制。本文的目的是证明只有具有机制的紧张圆顶对初始预应力的变化敏感。考虑了两个张力圆顶。此外,考虑比较的标准单层圆顶。分析分为两个阶段。首先,检查了特征性张力特征的存在(定性分析)。接下来,研究了静态外部载荷下的行为(定量分析)。特别是,分析了初始预应力水平对结构的位移,努力和刚度的影响。为了评估这种行为,使用了几何非线性模型。该模型是在Mathematica环境中编写的原始程序中实现的。分析表明,对于具有机制的圆顶,调整预压力的力对静态特性的影响。已经发现,刚度不仅取决于材料的几何形状和特性,还取决于初始预应力水平和外部负载。在不存在机制的情况下,结构对初始预应力不敏感。
飞行训练指导后勤海上和搜救...
100.简介 本章介绍船上操作的基础知识。最终,海上后勤通常指垂直补给 (VERTREP) – 船舶外部负载操作。您已经了解了陆地上的外部负载操作,其程序非常相似。主要区别在于学习如何从在水中移动且易受环境条件影响的船甲板上进行操作。本次培训不包括 VERTREP – 您将在舰队中学习 – 但将专注于船上的所有其他操作。此处包含的信息和程序将为舰队构建船上操作知识的基础。飞行甲板操作带来了陆基航空设施所没有的独特挑战。这些操作侧重于扎实的程序技能,以减轻许多危险,包括飞行甲板的俯仰和滚转、在小点着陆、避开船上障碍物、在靠近水面的地方操作以及考虑风湍流。程序合规性、熟练程度和 CRM 对于安全、成功的操作至关重要。这里包含的信息和程序将为舰队构建船上操作知识的基础。飞行甲板操作带来了陆基航空设施所没有的独特挑战。这些操作侧重于扎实的程序技能,以减轻许多危险,包括飞行甲板的俯仰和滚转、在小点着陆、避开船上障碍物、在靠近水面的地方操作以及考虑风湍流。程序合规性、熟练程度和 CRM 对于安全、成功的操作至关重要。101.船舶类型 重要的是要了解,每种具有直升机着陆能力的船舶都会根据配置、大小和认证级别提供不同的支持服务和设施。在飞往船上进行着陆练习之前,您应该研究船上操作的相关细节,例如飞行甲板的大小、可用的燃料和电力设施、机库和维护服务、通信程序和着陆模式。航空母舰 (CVN) 上的飞行操作与驱逐舰 (DDG) 上的操作不同,当您接近其空域时,您的机组人员应该了解这些差异。航空舰艇 - 指 CVN 和两栖攻击舰(两栖攻击舰(通用)[LHA]/两栖攻击舰(多用途)[LHD])。这些舰船是大型海上平台,可用于固定翼和直升机飞行操作,具有最高水平的航空支持服务。空中能力舰船 – 指具有直升机能力的小型舰船,例如 DDG、巡洋舰 (CG) 和两栖运输船坞 (LPD)。由于尺寸较小且船员组成复杂,空中能力舰船更容易受到风湍流和飞行甲板运动的影响,并且提供不同程度的支持服务。此外,船上人员通常较少
基于摩擦电原理的人工智能金属聚合物滑动轴承
随着物联网和人工智能的快速发展,对智能轴承传感技术的需求急剧增加。一般的轴承传感器只能识别来自温度或振动的基本信息,远远不能满足自诊断和自维护。最近,基于摩擦电纳米发电机的自供电传感技术为制造智能轴承开辟了一条新途径。在本研究中,摩擦电原理被应用于商用金属聚合物滑动轴承(MPPB),该轴承可以实现自感知,自诊断和自维护。摩擦电MPPB(T-MPPB)的几何结构旨在平衡输出效率和外部负载,并验证了超强的耐久性和负载能力。此外,首次揭示了边界和静水流体润滑下输出变化趋势背后的机制。此外,深度学习算法可以高度准确地对润滑状态进行分类。所提出的 T-MPPB 有可能根据 AI 分类的润滑状况,使用润滑泵实现自我维护。这项研究不仅确立了设计自供电智能 MPPB 的可行性,还展示了一种识别润滑状态的方法,从而通过自供电传感器实现自我诊断和自我维护能力。

fortiweb 7.4.2管理指南
更改日志3简介15好处15架构17范围17新的19个关键概念21工作流21扫描序列23 IPv6支持32针对特定网络攻击的解决方案33 HTTP/HTTPS威胁34 DOS攻击38 HTTP/2 availability (HA) 46 Active-Passive HA 47 Standard Active-Active HA 47 High volume active-active HA 49 Administrative domains (ADOMs) 50 Defining ADOMs 51 Assigning administrators to an ADOM 53 How to use the web UI 53 System requirements 53 URL for access 53 Permissions 54 Maximum concurrent administrator sessions 57 Global web UI & CLI settings 57 Buttons, menus, & the displays 60 Shutdown 63 How要设置您的fortiweb 64设备与VMware 64注册您的fortiweb 64计划网络拓扑64外部负载平衡器:之前或之后?65如何选择操作模式67反向代理模式的拓扑72透明模式中的任何一个拓扑74离线保护模式的拓扑75 WCCP模式的拓扑77高可用性拓扑(HA)聚类78
fortiweb 7.4.5管理指南
更改日志3简介15益处15架构17范围17新的19个关键概念20工作流程20扫描序列22 IPv6支持31针对特定Web攻击的解决方案32 HTTP/HTTPS威胁33 DOS攻击37 HTTP/2 HTTTP/2支持38 HTTP Sessions&http sessions&http sessions&http sessions&Security 39 fortiweb sessions vs. availability (HA) 45 Active-Passive HA 46 Standard Active-Active HA 46 High volume active-active HA 48 Administrative domains (ADOMs) 49 Defining ADOMs 50 Assigning administrators to an ADOM 52 How to use the web UI 52 System requirements 52 URL for access 52 Permissions 53 Maximum concurrent administrator sessions 56 Global web UI & CLI settings 56 Buttons, menus, & the displays 59 Shutdown 62如何设置您的FortiWeb 63设备与VMware 63注册FortiWeb 63计划网络拓扑63外部负载平衡器:之前或之后?64如何选择操作模式66反向代理模式的拓扑71透明模式中的任何一个拓扑73离线保护模式74 WCCP模式的拓扑76高可用性拓扑(HA)聚类77