XiaoMi-AI文件搜索系统
World File Search System姿态

共轴旋翼飞行器控制算法研究...
摘要:本文提出了一种共轴旋翼飞行器的滑模PID控制算法,之后采用Adams/MATLAB仿真与试验进行验证,结果表明该控制方法能够取得满意的效果。首先,当考虑上下旋翼间的气动干扰时,很难建立准确的数学模型,利用叶素理论和动态来流模型计算上下旋翼间的气动干扰和桨叶的挥动运动,其余不能准确建模的部分通过控制算法进行补偿。其次,将滑模控制算法与PID控制算法相结合对飞行器的姿态进行控制,其中,采用PID控制算法建立姿态与位置之间的关系,使飞行器能够更加平稳地飞行和悬停。第三,将飞行器的三维模型导入Adams,建立动力学仿真模型。然后在Simulink中建立控制器,并将控制器与动态仿真模型进行联合仿真,并通过仿真将滑模PID控制算法与传统PID控制算法进行比较,最后通过实验验证了滑模PID控制算法与传统PID控制算法的有效性。
Sodern 宣布推出其新型 Auriga™ Gyro 卫星设备
然而,由于轨道的多样性以及发射器和 OTV 任务的持续时间,我们的客户要求我们找到一种解决方案,使姿态控制更稳定,以应对跟踪器被太阳遮蔽或惯性单元漂移的问题。因此,我们的 Auriga™ 陀螺仪解决方案旨在为客户提供精确、连续的信息,以实现最佳 ADCS。该解决方案将满足常规和敏捷任务(如地球观测和物联网)的需求,但也可用于新发射器、长期任务和/或需要在整个任务过程中进行最佳姿态控制的多轨道发射。我们收到越来越多要求配备这种发射器的请求,并致力于向客户提供我们的专业知识和技能。” Sodern 开发了新版本的 Auriga™ 软件库,用于控制 OH。该库现在包括使用卫星上任何可用陀螺仪提供的角速度的选项。 Auriga™ 陀螺仪对于执行地球观测或太空监视等敏捷任务的卫星特别有用。Auriga™ 陀螺仪还可以安装在执行长期任务的发射器上。通过将 Auriga™ 星跟踪器与陀螺仪耦合,运动稳健性(即承受快速旋转的能力)得到显著改善,包括星跟踪器处理过程中陀螺仪的速度。此外,将星跟踪器的数据与陀螺仪的数据合并,使耦合设备能够持续提供姿态,即使在星跟踪器不可用(致盲、卫星机动)时也是如此。这个新软件版本还包括在经历致盲或卫星机动后快速返回跟踪模式的算法,而无需经过获取模式(空间丢失模式)。如果陀螺仪测量不可用,星跟踪器将继续工作而不会中断。该解决方案还具有飞行中估计和校正误差的算法,特别是陀螺仪(偏差、比例因子、轴间错位)。这可以比在地面上更精确地校正误差,并提供最佳性能。与简单的战术级陀螺仪(ARW = 0.15°/√h)结合使用可以显著提高 Auriga TM 的稳健性:
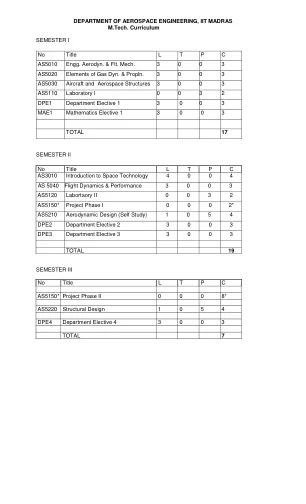
MT 课程 - AE IITM
M.Tech. 课程内容 AS 3010 航空航天技术概论 3003 航天任务类型、环境、天体动力学:轨道力学基础(双体运动、圆周速度和逃逸速度、椭圆双曲和抛物线轨道运动);基本轨道机动。 火箭推进基础:上升飞行力学:运载火箭选择。进入大气层;进入飞行力学;进入加热。姿态确定和控制;基本概念;旋转动力学回顾;刚体动力学;扰动扭矩;被动姿态控制;主动控制;姿态确定。热控制、航天器功率、电信。 AS 5010 工程空气动力学与飞行力学 3003 流体力学基本方程。无粘流。流函数。速度势。二维不可压缩流:拉普拉斯方程及其解。翼型流;保角变换,薄翼型理论。有限机翼简介;普朗特升力线理论。边界层和分离对翼面流动的影响。大气。飞机基本性能评估。稳定性和控制简介。 AS 5020 气体动力学和推进要素 3003 气体动力学基本方程。一维等熵流。马赫波,冲击波。带有冲击、传热和摩擦的一维流动。二维冲击。普朗特-迈耶流。线性化二维亚音速流;普朗特-格劳特/戈特特变换。线性化超音速流;阿克雷特理论。吸气式和火箭推进系统的分类及其工作原理。螺旋桨理论,不同类型发动机的性能。高度和前进速度的影响。燃气涡轮发动机部件、构造和性能。 AS 5030 飞机和航空航天结构 3003 飞机分类、飞行原理、飞行控制、基本仪器和飞机系统、直升机机翼分析。剪切中心。封闭和开放管的弯曲和扭转。多室管。柱和梁柱。板和板桁组合的弯曲和屈曲。机身分析。实验技术;应变计、光弹性、离散和连续系统的振动。
海军空间技术中心航天器工程部航天器集成与测试设施
SED 提供全方位的太空系统工程和运营服务,包括结构和机制、电气和电子系统、飞行、地面和测试软件开发、姿态确定和控制系统、推进和反应控制系统、热控制系统、卫星集成和测试、运载火箭和卫星到助推器级集成以及飞行操作指挥、控制、通信、网络工程和管理方面的分析、设计和硬件专业知识。
小型无人机的航空电子系统开发
从硬件选择、导航和控制算法设计以及软件开发的角度考虑了两种小型无人机 (UAV) 的航空电子系统。解决了许多小型无人机系统面临的一些共同挑战,包括低速时阵风干扰抑制、控制功率和系统集成。描述了从这些努力中产生的快速原型模拟框架。建议在特定应用中使用多种导航、姿态确定和控制算法。
AH-64D 长弓阿帕奇直升机仪表气象条件/仪表飞行规则飞行的操纵品质评估
仪表起飞________________________________________________________________20 无线电导航 FMC 开启 ___________________________________________________________21 无线电导航,FMC 关闭_____________________________________________________22 NDB 进近___________________________________________________________________23 全球定位系统 (GPS) 进近 ____________________________________________25 仅使用备用仪表进行异常姿态恢复 _______________________________26 仅使用备用仪表进行机场监视雷达 (ASR) 进近 _________________27 仅使用备用仪表进行精密进近雷达 (PAR) ________________________________________28
ETSI TS 101 377-1-1 V1.1.1 (2001-03)
A3 认证算法 GMR2-A3 A5/1 加密算法 GMR2-A5/1 A5/2 加密算法 GMR2-A5/2 A5/X 加密算法 GMR2-A5/0-7 A8 加密密钥生成算法 A8 AB 接入突发 Abis MSC 和 BSC 之间的接口 AC 接入等级(C0 至 C15) 应用上下文 ACC 自动拥塞控制 ACCH 关联控制信道 ACI 相邻信道干扰 ACK 确认/确认 ACM 累计呼叫计数器 地址完整消息 ACR 绝对类别评级 ACS 姿态控制子系统 ACS-CELP 代数共轭结构 码激励线性预测 ACU 天线组合单元 天线控制单元 A/D 模拟到数字 ADC 管理中心模拟到数字转换器 ADCS 姿态确定和控制子系统 ADN 缩位拨号 ADPCM 自适应差分脉冲编码调制 ADPE自动数据处理设备 AE 应用实体 AEC 声学回声控制 AEF 附加基本功能 AEIRP 总有效全向辐射功率 AFC 自动频率控制 AGC 自动增益控制 AGCH 接入授权信道 AI 行动指示器行动项目 AIM 有源互调 AIT 组装、集成和测试

用于灵活飞机轨迹跟踪和负载减轻的非线性增量控制
本文提出了一种用于柔性飞机同时进行轨迹跟踪和负载减轻的非线性控制架构。通过利用控制冗余,可以在不降低刚体指令跟踪性能的情况下减轻阵风和机动负载。所提出的控制架构包含四个级联控制环路:位置控制、飞行路径控制、姿态控制和最优多目标机翼控制。由于位置运动学不受模型不确定性的影响,因此采用非线性动态逆控制。相反,飞行路径动力学受到模型不确定性和大气扰动的干扰;因此采用增量滑模控制。基于 Lyapunov 的分析表明,该方法可以同时降低传统滑模控制方法的模型依赖性和最小可能增益。此外,姿态动力学为严格反馈形式;因此采用增量反步滑模控制。此外,还设计了一种新型负载参考生成器,用于区分执行机动所需的负载和过载负载。负载参考由内环最优机翼控制器实现,而过载负载由襟翼自然化,而不会影响外环跟踪性能。通过空间轨迹跟踪任务和阵风负载缓解任务验证了所提出的控制架构的优点

用于在轨服务的具有柔性附件的旋转漂浮空间机器人的鲁棒控制
线性和角航天器动力学。已经针对捕获应用进行了研究,因为潜在的翻滚目标需要经过调整的机械手方法。通过 Giordano 等人 (2018) 提出的工作空间调整策略或 Giordano 等人 (2019) 同时控制全局质心和航天器姿态,已经研究了如何有效使用推进器来补偿机械手运动。同样,当仅控制机械手时,Pisculli 等人 (2015) 开发了反应零空间控制,以减少机械手和航天器底座之间的相互作用。还可以注意到没有考虑底座执行器的情况。更一般地说,轨迹规划被认为可以减少机械手运动和/或外部干扰对底座的影响,至少对于无奇点轨迹而言。Rybus 等人采用了非线性模型预测控制。 (2017) 确保机械手实现优化轨迹,最大限度地减少机械手对卫星的干扰,同样在捕获接近阶段,Lu 和 Yang (2020) 研究了笛卡尔轨迹规划,以最大限度地减少姿态干扰,Seddaoui 和 Saaj (2019) 提出了一种用于燃料消耗优化的无碰撞路径和无奇点路径的通用轨迹规划,同时采用 H ∞ 控制和前馈补偿处理内部和外部扰动。