XiaoMi-AI文件搜索系统
World File Search System实际系统

光伏系统中最大功率点跟踪算法的比较研究 1 Saad A. Al-Kazzaz 和 2 Mohammed M. Al_juborie ¹讲师,摩苏尔大学机电一体化系,伊拉克摩苏尔。²学生,摩苏尔大学电气系,伊拉克摩苏尔。
可再生能源在替代化石燃料资源方面发挥着至关重要的作用,而太阳能是这些资源之一,它被认为是环境友好的,并且在过去几年中得到了越来越多的使用。使用太阳能电池板时的主要问题是工作点会随着太阳辐照强度和太阳能电池板表面温度的变化而波动。当负载直接与太阳能电池板耦合时,在大多数情况下,输送的功率不会达到最大功率,因此需要最大功率点跟踪控制器来使系统高效运行,从而使电压转换电路的负载和输入阻抗之间匹配运行,通过这种运行,工作点处于最大功率。在本研究中,使用 MATLAB-2016a 程序对最大功率点跟踪系统进行了仿真,并使用了多种算法:扰动观察算法、增量电导算法、滑模控制器和电压转换电路(降压转换器)的负载与输入阻抗匹配的随机搜索算法。设计并搭建了同步降压转换器电路,然后实际实施系统。微控制器 arduino UNO 用于实现跟踪算法。实际系统实施中使用扰动和观察算法。。结果表明,滑模控制器在获得最大功率方面比传统算法快两倍以上,比随机搜索算法快约 6 毫秒,随机搜索算法比传统算法快约 1.5 倍,并且当辐照强度发生变化时,响应速度更快,可以访问新的最大功率点。SMC 的性能优于传统算法,随机搜索算法优于传统算法,其性能非常接近滑模控制器的性能。实际实施的响应非常快且强大。

提交给 2023-2032 年太空生物和物理科学十年调查的专题白皮书
1 简介:长期太空居住将需要在先进制造、热控制和生命支持过程方面进行变革性改进[1][2][3]。先进制造工艺包括金属和金属合金的增材制造、软物质、金属的定向能量沉积和晶体生产等[4]。热控制过程包括管理电子设备、太空核反应堆、电池和生命支持系统的热量释放。这些过程对于国际空间站、月球表面的居住地以及涉及美国宇航局科学任务理事会 (SMD) 和人类探索的所有太空计划都很重要[5]。由于对部署在轨道上或月球表面的硬件和空间模块的访问有限,系统的设计和开发几乎没有或根本没有误差余地。迭代之间的时间需要结合基于合理理论模型或机器学习算法的模拟。随着太空计划越来越深入太阳系,预先了解材料和系统的行为变得越来越重要。了解系统行为(尤其是在太空极端环境下的行为)对于充分利用项目预算、最大程度降低人员伤亡风险以及推动未来几代人的进步必不可少。正确设计和控制这些过程和系统需要准确了解系统参数和材料热物理特性,以便进行模拟并最终设计和开发实际系统。对热物理和化学特性的理解被纳入过程算法中,从而实现操作优化,并最大程度减少为太空栖息地开发的宝贵能源的重复使用。这种理解的基础在于准确确定热物理特性。关键的热物理特性是与流体过程有关的特性,例如密度、粘度、表面张力和弹性。其他重要的热物理特性包括热导率和质量传递特性,例如扩散系数。
最大功率点跟踪的比较研究...
可再生能源在替代化石燃料资源方面发挥着至关重要的作用,而太阳能是这些资源之一,它被认为是环境友好的,并且在过去几年中得到了越来越多的使用。使用太阳能电池板时的主要问题是工作点会随着太阳辐照强度和太阳能电池板表面温度的变化而波动。当负载直接与太阳能电池板耦合时,在大多数情况下,输送的功率不会达到最大功率,因此需要最大功率点跟踪控制器来使系统高效运行,从而使电压转换电路的负载和输入阻抗之间匹配运行,通过这种运行,工作点处于最大功率。在本研究中,使用 MATLAB-2016a 程序对最大功率点跟踪系统进行了仿真,并使用了多种算法:扰动观察算法、增量电导算法、滑模控制器和电压转换电路(降压转换器)的负载与输入阻抗匹配的随机搜索算法。设计并搭建了同步降压转换器电路,然后实际实施系统。微控制器 arduino UNO 用于实现跟踪算法。实际系统实施中使用扰动和观察算法。。结果表明,滑模控制器在获得最大功率方面比传统算法快两倍以上,比随机搜索算法快约 6 毫秒,随机搜索算法比传统算法快约 1.5 倍,并且当辐照强度发生变化时,响应速度更快,可以访问新的最大功率点。SMC 的性能优于传统算法,随机搜索算法优于传统算法,其性能非常接近滑模控制器的性能。实际实施的响应非常快且强大。

飞机发动机电子控制单元性能测试系统设计
发动机电子控制单元(EECU)是航空发动机中非常重要的部件,在其开发过程中需要进行多项验证试验。由于使用实际发动机进行此类验证试验需要花费大量的时间和成本,而且昂贵的发动机可能会损坏或出现安全隐患,因此,能够虚拟地产生与实际发动机相同信号的模拟器是必不可少的[1]。替代实际发动机的虚拟发动机模拟器应该能够实时提供与实际发动机运行几乎相同水平的发动机运行模拟。因此,模拟速度应该与实际系统在用户指定的时间范围内进行输入、计算和输出的速度一样快。实时仿真需要开发能够几乎实时进行计算的实时发动机模型和适当的硬件。已经进行了许多关于燃气涡轮发动机电子发动机控制系统的研究。在之前的研究中,W.J.Davies 等人进行了 F-14 飞机和推进控制集成评估。他们的论文介绍了 PWA 执行的 FADEC/F-14 集成评估,并讨论了 FADEC/F-14 集成系统的优势 [2]。H. Yamane 等人对飞机发动机控制系统的各个方面进行了调查。在他们的工作中,提出了各种用于飞机发动机的电子控制系统 [3]。F. Schwamm 对安全关键应用的 FADEC 计算机系统进行了研究。在 Schwamm 的工作中,研究了 FADEC 的发展趋势 [4]。K. Hjelmgren 等人。对单引擎飞机 FADEC 的可靠性分析进行了研究。他们的论文介绍了用于控制飞机燃气涡轮发动机的两种容错 FADEC 选项的可靠性分析 [5]。K. Ito 等人。对燃气涡轮发动机 FADEC 的最佳自诊断策略进行了研究。在他们的论文中,FADEC 在第 n 次控制计算时进行自诊断。最后提供了数值示例 [6]。Ding Shuiting 等人。对 FHA(功能性
![arXiv:2501.06839v1 [quant-ph] 2025 年 1 月 12 日](/simg/6\67a26e408a97ed2e61c90258e8d43cb0767f7820.webp)
arXiv:2501.06839v1 [quant-ph] 2025 年 1 月 12 日
量子通信理论专注于研究传输量子信息的量子信道,其中传输速率由量子信道容量来衡量。这个量表现出几个有趣的特性,例如非可加性、超激活等等。在这项工作中,我们表明,一种被称为抗降解单模高斯信道的量子信道(其容量被认为为零)可以通过引入量子纠缠来“激活”以传输量子信息。虽然信道的输出本身不能用于检索输入信号,但将其与额外的纠缠相结合可以实现这一点。除了理论意义之外,这种激活还可以在实际系统中实现。例如,在双模压缩相互作用机制中用于量子转导的电光系统中,转导通道是抗降解的。我们证明该系统可以在与辅助模式的纠缠的帮助下传输微波光量子信息。这样就产生了一种新型的量子换能器,它在很宽的参数空间上表现出正的量子容量。引言——量子通道模拟了量子信息在时间或空间中的传输。研究各种噪声量子通道及其潜在的信息传输速率——量子通道容量——是量子通信理论的核心。与经典量子通道容量不同,量子通道容量没有简单的公式,其评估通常涉及计算困难的所谓双字母优化[1,2]。因此,量子容量表现出一系列不寻常的行为,如活化和超活化[3-6],这反映了量子信息在通道中传播的非平凡方式。只有少数特定类型的量子通道的量子容量的确切值才是已知的。有一种这样的信道被称为抗降解信道,它已被证明具有零量子容量 [ 7 , 8 ],这意味着没有量子信息能够以零误差通过该信道。在本文中,我们表明,如果将一种抗降解玻色子高斯信道与辅助信道相结合,则可以实现非零量子信息传输速率

配电系统维护优化
摘要 最大限度提高资产绩效是电力配电系统运营商 (DSO) 的主要目标之一。为了实现这一目标,在满足客户和监管机构的需求的同时,最小化生命周期成本和优化维护至关重要。因此,基本目标之一是以高效和有效的方式将维护和可靠性联系起来。此外,这需要确定预防性维护和纠正性维护之间的最佳平衡,这是本文要解决的主要问题。预防性维护和纠正性维护之间的平衡被视为一个多目标优化问题,一方面是客户中断成本,另一方面是 DSO 的维护预算。使用针对特定问题开发的元启发式方法以及进化粒子群优化算法获得解决方案。这些方法提供了一个帕累托边界,即一组多个解决方案,操作员可以根据偏好从中进行选择。优化建立在专门为电力系统开发的组件可靠性重要性指标之上。这些指标的一个重要方面是它们同时与多个电源和负载点一起工作,解决电力系统的多状态可靠性问题。为了计算这些指标,使用了基于分析和模拟的技术。这些指标构成了组件可靠性性能和系统性能之间的联系,从而实现了维护优化。所开发的方法已在两个基于实际系统和数据的案例研究中进行了测试和改进,证明了这些方法的实用性,并表明它们已准备好应用于配电系统。此外,值得注意的是,经过一些修改,这些方法可以应用于其他类型的基础设施。但是,为了进行优化,需要研究电力系统的可靠性模型,以及对维护行动的影响(故障率变化)及其相关成本的估计。鉴于此,可以分别向 DSO 和客户提供总体降低的总维护成本和更好的系统可靠性性能。这是通过将预防性维护重点放在从系统角度来看具有高改进潜力的组件上来实现的。关键词:可靠性重要性指数、多目标优化、维护优化、资产管理、客户中断成本、以可靠性为中心的维护(RCM)、以可靠性为中心的资产管理(RCAM)、蒙特卡洛模拟、进化粒子群优化。
图形和序列的量子机器学习方法:应用于核安全评估
在本文中,我们的目标是通过使用纯量子算法以及量子机器学习算法来提供不太复杂的解决方案,以合理的时间解决概率安全研究(PSS)领域的问题。我们解决 EPS 问题的两个方面,即静态和动态。对于静态问题,我们感兴趣的是找到系统中可能产生严重事故的所有基本事件组合,我们建议通过量子算法来获得这些基本事件组合,使用有向图,而不是搜索 SAT 问题的所有解。我们的贡献是一种量子算法,它使用线性数量的量子比特,通过经典过滤器,我们可以找到所有能够产生这些事故的基本事件的组合。在动态情况下,我们感兴趣的是找到系统中的所有偶然序列,我们的主要兴趣是处理这些序列。在经典情况下,为了找到所有这些序列,我们使用系统的状态图并寻找当前状态和所有临界状态之间的所有路径。由于这个问题是 NP 完全的,我们提出了一个量子解决方案来找到所有这样的路径。我们提出了两种量子算法,均基于量子行走的哲学。第一个算法在有向无环图中查找源顶点和几个目标顶点之间的所有路径。该算法使用N个量子比特和M个门来寻找所有路径。第二个是第一个的混合版本,即使量子比特数量减少,它也能够处理大图。另一个贡献是采用动态时间规整 (DTW) 算法的量子方法来计算这些序列之间的相似性,以及能够使用长度动态变化的子序列在序列之间找到最佳匹配的版本。我们还提出了一种量子隐马尔可夫模型 (QHMM) 的学习策略,以便从系统的任何初始状态生成意外场景并实时管理系统。我们最终提出了量子 k-means 的改进版本。经典版本的k-means每次迭代的复杂度为O(K×M×N)。在我们的案例中,使用单个量子电路计算观测值和聚类中心之间的所有距离,并使用 Grover 的量子搜索算法,我们可以将复杂度降低到 O(log(K×M×N))。还提出了利用绝热量子的量子平衡k均值算法的另一个版本。最后,我们提出了一种比经典版本更快的 Convex-NMF 算法的量子版本。我们将提出的方法应用于 EPS 领域的实际系统,以此作为本论文的结论。
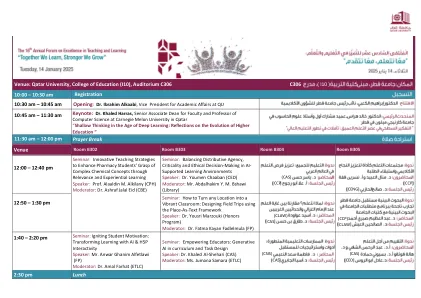
(i10)C306地点:卡塔尔大学,教育学院...
哈立德·哈拉斯(Khaled Harras)博士是卡塔尔(Carnegie Melon University)的卡内基瓜大学(Carnegie Melon University)的高级院长和计算机科学教授。他还是Hamad Bin Jassim CS教育中心的主任,也是那里的Networking Systems Lab(NSL)的创始人/主任。在学术上,在过去的二十年中,他一直在挑战和机会性网络,传感器网络,无人驾驶汽车(UAV),普遍存在和普遍的系统,边缘/雾计算和联合学习领域的各种系统领域工作。他还在无线和移动网络测量领域,构建实际系统和测试台的领域以及基于真实数据的设计和实施框架方面具有专业知识。Harras博士在许多国际著名的期刊,会议和讲习班以及4项美国专利中拥有150多家指导出版物。 与他的研究小组一起,他两次获得了全国最佳计算研究奖,获得了两个最佳纸质奖项,他的作品在网上在线介绍了各种场所,例如MIT Tech Review和Tech The Future。 迄今为止,他一直参与或管理超过500万美元的研究赠款,并监督了45名以上的不同人员,包括本科生和研究生,博士后研究人员和研究工程师。 他是ACM和IEEE的高级成员。 在学术界之外,Harras博士曾在Citrix Systems在技术行业工作,并与Intel,Lockheed Martin和NASA的Jet Propulsion Lab(JPL)密切合作。 并发会议A(12:00 - 12:40 PM)Harras博士在许多国际著名的期刊,会议和讲习班以及4项美国专利中拥有150多家指导出版物。与他的研究小组一起,他两次获得了全国最佳计算研究奖,获得了两个最佳纸质奖项,他的作品在网上在线介绍了各种场所,例如MIT Tech Review和Tech The Future。迄今为止,他一直参与或管理超过500万美元的研究赠款,并监督了45名以上的不同人员,包括本科生和研究生,博士后研究人员和研究工程师。他是ACM和IEEE的高级成员。在学术界之外,Harras博士曾在Citrix Systems在技术行业工作,并与Intel,Lockheed Martin和NASA的Jet Propulsion Lab(JPL)密切合作。并发会议A(12:00 - 12:40 PM)他还曾担任ICT部长的顾问,以及卡塔尔计算与研究所(QCRI)的高级系统科学家。标题:深度学习时代的浅思维:对高等教育演变的思考:在这次演讲中,哈立德博士将迅速穿越高级ED的演变,从其在个性化的,一对一的指导中到当今的大型,广义教室。这种转变是在工业革命对熟练劳动力的需求的推动下,导致了一种普遍的标准教育方法。这些广义方法通常会导致低于PAR的学习,这是由于学生背景,经验和学习步伐的巨大差异。在过去的几十年中,技术革命一直在努力解决这些缺点。互联网已经使知识的访问民主化,MOOC提供了可扩展的教学解决方案,现在AI承诺通过可扩展的个性化学习为我们带来完整的圈子。但是,我们当前的背景使我们在高级ED的挑战和机遇方面使我们处于前所未有的关键时刻。尽管AI和Tech创造了大量的学习机会,但通常是由于他们,学生正在寻求知识获取的捷径,但他们的时间已成为引起关注的战场,并且他们受到了指数的干扰,破坏了深厚,有意义的学习。为了解决这个问题,我们必须重新定义作为AI时代的教育者的角色。通过发展成为“知识教练”,我们可以确保我们的学生有能力浏览现代世界的复杂性。Khaled博士将分享关于我们如何在维持高等教育学习的核心目标的同时拥抱所需变革的核心目标之间取得微妙的平衡的想法。 我们的行动将影响教育的未来,并确定我们是在学生中培养浅层思维还是真正的深度学习。Khaled博士将分享关于我们如何在维持高等教育学习的核心目标的同时拥抱所需变革的核心目标之间取得微妙的平衡的想法。我们的行动将影响教育的未来,并确定我们是在学生中培养浅层思维还是真正的深度学习。