XiaoMi-AI文件搜索系统
World File Search System工件
腐蚀抑制剂N 213-安全数据表
采取适当个人保护设备的保护措施。不要盯着眼睛,皮肤或衣服。不要呼吸蒸气或雾气。不要摄取。如果在正常使用期间,该材料会出现呼吸危险,仅与足够的通风一起使用或佩戴适当的呼吸器。将原始容器或由兼容材料制成的批准的替代品保持在不使用时密闭。请勿重复使用容器。空容器保留产品残留物,可能是危险的。封闭空间中雾气,烟气和蒸气的浓度可能导致爆炸性大气的形成。必须避免过多的飞溅,搅拌或加热。在金属工作期间,工件或工具的固体颗粒会污染流体,并可能引起皮肤擦伤。如果这种擦伤会导致皮肤渗透,则应尽快采用急救处理。工件或工具中某些金属的存在,例如铬,钴和镍,可能会污染金属加工液,因此可能会诱导过敏性和其他皮肤反应,尤其是在个人卫生不足的情况下。

Expertenforum Maschinenbau-数字资产管理
带有宽度为48毫米(→50毫米球)的工件载体,最大负载3千克•带有西门子电动机的Autonox Knickarm Scara4-700机器人•Simatic S7驱动器控制器1507D TF•SINAMICS S120 SINAMICS S120驱动技术,用于贡献机器人机器人的贡献•Simatic Safitic Kinematics Kinematics,
***** 机密的 *****
名字 – 姓氏 ................................................................................手机................................... 电子邮件地址 ................................................................................纳税人识别号(公司)................................................................................................................电话号码(财务部)...................................................................................................公司...........................................................................................................................部门/实验室................................................................................................电话.................................................................................................................传真.................................................................................................................签发人名称和地址帐单和收据名称................................................................................................................................................地址................................................................................................................................................................................................................................................................................ .................................................................................................................................................................................................................................................................................用于寄送原始收据的邮寄信封的姓名和地址姓名......................................................................................................................................地址................................................................................................................................................................................................................................................................................ .................................................................................................................................................................................................................................................................................样品和分析的详细信息 ** 请勿取样潮湿或会散发蒸汽的样品。或者有灰尘散落与此工具一起使用9 ** 样本名称......................................................................................................................................................数量 ........................................分析区域的导电性为良好、中等、低、不导电。协助分析的附加详细信息.................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................发货状态5自行运送工件通过邮寄等方式发送工件................................................................分析结果提交状态请求自我分析结果通过其他电子邮件请求分析结果................................................................注意如果本设备以任何方式损坏或发生故障,则不受制造商的控制。它来自于用户的使用情况或者来自于用户的样本。服务请求者或服务请求者的公司或机构必须对损失负责碰巧这台机器需要修理。这只手已经可以正常使用了。

重播:通过...
摘要。3 D传感是自动驾驶汽车的基本任务。其部署通常依赖于对齐的RGB摄像机和激光镜头。谨慎的同步和校准,在LiDAR投影的深度图中,系统的错位持续存在。这是由于两个传感器之间的物理基线距离所致。工件通常反映为背景激光雷达错误地投射到前景上,例如汽车和行人。KITTI数据集使用立体声摄像机作为启发式解决方案来删除工件。但是,大多数AV数据集(包括Nuscenes,Waymo和DDAD)都缺少立体声图像,使Kitti解决方案不适用。我们提出了Replay,这是一种无参数的分析解决方案,用于删除投影伪像。我们在假设的虚拟LiDAR相机和RGB摄像机之间构建了一个Binocular视觉系统。然后,我们通过使用拟议的分析溶液确定面孔闭塞来删除投影伪影。我们显示出具有无伪像的深度图的最先进(SOTA)单眼估计器和3 d对象探测器的一致改进。
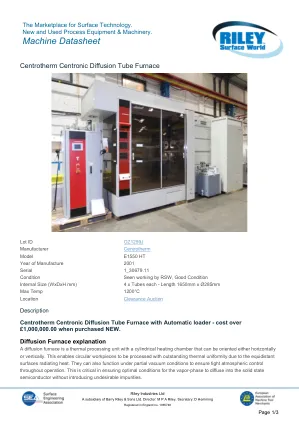
Centrotherm Centronic扩散管炉
扩散炉是一个热处理单元,具有圆柱加热室,可以水平或垂直定向。由于等距表面辐射热量,因此可以通过出色的热均匀性处理圆形工件。它们也可以在部分真空条件下发挥作用,以确保整个操作中的大气控制。这对于确保蒸气相扩散到固态半导体的情况下而无需引入不良杂质的最佳条件至关重要。
制造工程实验室计划,1995 年
校准 (SP-250) CMM 校准工件 与橡树岭制造技术中心 (ORCMT) 在尺寸计量方面的合作 复杂形状尺寸计量 制造部件的计算计量 关节臂性能评估方法的开发 坐标测量机 用于长度测量的二极管激光器 DOD 支持

人工智能驱动的人才管理系统
摘要:人工智能 (AI) 有可能通过实施先进的自动化劳动力管理系统来改善人才管理策略。人工智能可以使这种改进成为现实。本研究的目的是发现生成新的面向 AI 的工件的新要求,以便有效解决与人才管理有关的问题。设计工件是一种智能人力资源管理 (HRM) 自动化解决方案,主要基于人才智能模块进行人才职业管理。改善专业评估和规划功能之间的联系是该计划的主要目标。利用设计科学方法,我们研究了有组织的机器学习方法的使用。该技术是完整 AI 解决方案框架的关键组成部分,该框架将通过建议的技术-组织-环境 (TOE) 理论与创新扩散理论 (DOI) 的适度结合得到进一步指导。该框架是为了解决与 AI 相关的问题而设计的。除了人才管理解决方案中可用的自动化组件外,本研究还将为研究人员可能遵循的实用方法提出建议,以满足公司对人才成长的特定要求。
推荐引用 推荐引用 David Nersessian & Ruben Mancha,从自动化到自主:人工智能创新中的法律和道德责任差距,27 M ICH.T ECH.L.R EV.55 (2020)。网址:https://repository.law.umich.edu/mtlr/vol27/iss1/3
人工智能 (AI) 系统在日常生活中的重要性日益凸显,这些系统在无需人工输入的情况下处理数据和采取行动的能力也不断提高,这引发了重要的法律和道德问题。本文确定了价值链中的三个主要 AI 参与者(创新者、提供商和用户)和三种主要的 AI 类型(自动化、增强和自主性)。然后,本文从两个角度考虑了 AI 创新中的责任:(i) 因开发、商业化和使用具有内置 AI 功能的产品(本文中称为“AI 工件”)而产生的严格责任索赔;(ii) 关于创建 AI 系统和 AI 工件的开发人员和管理人员的道德实践的原创研究。道德视角很重要,因为目前,法律很可能落后于技术现实——如果还没有的话。将责任问题与道德视角结合起来考虑,可以对 AI 创新的可能后果和不利影响进行更细致的评估。公司应该考虑法律和道德策略,思考自己的责任和限制责任的方法,政策制定者也应该考虑事前 AI 监管。

基于Firebase Real-Time的多模态交互框架...
摘要。依赖一种具有单一交互模式的技术可能会使一些用户受益,但如果他们不愿意使用该模式,肯定会排除更多用户。解决方案就是在交互系统的初始设计中包含多种模式,使其更能适应更多用户的需求。包括多种模式可以迅速增加需要接收用户命令流的交互对象的数量。如果用户需要在家庭自动化环境中与多个工件交互,则尤其如此。在本文中,我们介绍了正在进行的多模式家庭自动化系统项目的总体架构。该系统依赖于一个名为 Firebase 的基于 Web 的数据库来交换用户输入并向多个工件发出命令。用户输入是使用智能手机和配备网络摄像头的计算机获取的。它们捕捉用户的触觉输入、语音短语、眼神注视以及头部姿势特征,如倾斜和面部方向。我们能够在数据库和不同的输入采集接口之间实现可靠的数据传输。作为系统原型设计的第一步,我们能够控制使用 Unity3D 软件开发的两个独立游戏界面。

增材制造过程中残余应力预测方法的比较研究
界面系统(NFIS)用于预测航空工业铝部件的残余应力 [5]。Chukwujekwu 等人使用有限元分析预测了 6Al-4V 钛基工件的残余应力 [6]。Meyghani 等人对基于 ABAQUS、ANSYS 和 FLUENT 的搅拌摩擦焊接模拟结果进行了比较研究 [7]。Kortabarri 等人比较了 Inconel 718 基工件的应力集中 [8]。Mukherjee 等人发现可以通过减小 AM 过程中基材层的厚度来控制应力 [9]。Huang 等人提出了一种预测正交切割过程中残余应力的模型 [10]。Yang 等人研究了激光床熔合过程中产生的残余应力 [11]。在分析残余应力水平时,考虑材料的热性能和机械性能非常重要。Megahed 等人展示了气泡在镍基高温合金中滞留的影响,如图 1 所示 [12]。制造工艺有多种方法,必须找到对产品影响最小的最佳方法,以降低热残余应力。因此,本研究的重点是确定预测 AM 中残余应力的最佳方法。