XiaoMi-AI文件搜索系统
World File Search System抛物线

利用亚轨道飞行测试推动行星探索科学技术发展 EW DiVito 1 , C. Tuck 1 , GH Peters 1 , DM McC
简介:亚轨道飞行测试是一种非常宝贵但经常被忽视的工具,可用于更快地推进太空研究和技术开发。美国宇航局的飞行机会计划利用商业飞行提供商,使用亚轨道火箭动力飞行器、飞行抛物线轨迹的飞机、高空气球和托管轨道有效载荷平台来加速太空技术的成熟。接触相关的太空环境可以以经济高效且及时的方式验证技术的功能,从而降低更长、更昂贵的任务(包括月球和火星任务)的风险。自 2011 年以来,飞行机会计划已促成超过 260 次飞行,进行了超过 870 次有效载荷测试。飞行机会团队的演讲者将重点介绍这些飞行测试如何支持技术和研究的成熟,并应用于月球和行星探索。
各向异性Shubin操作员的定量光谱不平等以及对无否可控制性的应用
摘要。我们证明了整个欧几里得空间上(各向异性的)舒宾仪的定量光谱不平等,因此,从相关的光谱子空间中的功能与有限的能量间隔相关的函数将其在整个空间上与合适子集的L 2-纳米在整个空间上的l 2-相关。我们估计值的一个特定特征是,将这些L 2 -norms相关的常数在整个空间的相应子集的几何参数中非常明确,这可能会在实质性上稀疏,甚至可能具有有限的度量。这扩展了J. Martin最近获得的结果,在谐波振荡器的特殊情况下,A。Dicke,I。Veselić和第二作者获得了结果。我们将结果应用于相关的抛物线方程的无控制性,以及与作用于R d×T d的(变性)Baouendi-Grushin算子相关的结果。

卫星遥测由新芯片增强,以增强和保护无线电链接(TT&C)2023年3月
天线单元:典型的TT&C天线是抛物线菜。它很方便,具有高收益的优势,结合了相对较低的制造和维护成本。,但随着追踪卫星数量的逐渐增加,机械扫描的天线(使用伺服电动机)越来越不合适。进入天线设计中最重要的创新之一,是电子扫描,平面阶梯式阵列天线(PAAS)的开发。PAAS越来越关注卫星应用,因为它们可以生成多个RF载体梁,因此同时跟踪多个卫星。与机械扫描的天线相比,PAAS可以同时进行快速光束扫描,而无需进行物理旋转并同时跟踪多个目标。就像半导体的进步正在改善基带电子设备一样;这些相同的进步使电子束转向TT&C系统中的RF链路敏捷性。
IWXM 2024
摘要我们将在LCLS上介绍最近的OPɵCS计量学,以展示X射线opɵc挑战的Mulɵtude,以及我们如何适应我们的乐器挑战。今年,我们在LCLS安装了两个主要的OPɵC系统,即X射线仪器(TXI)的Kirkpatrick-Baez(KB)镜像系统和RIX的Qrix光谱仪的材料科学共振InelasɵCX射线scaʃing。txi是一种独特的实验厨具,因为它旨在同时采用Soō和柔软的X射线,该射线来自LCLS的两个单独的光束线。TXI的KB镜像系统由两对KB镜子组成,即Soō和柔软的X射线对,总共有四个1-M长的镜子。要安装此镜像系统,我们必须在密封镜室之前在同一ɵ师时(大约一个月)中鉴定所有四个镜子。为了效率,我们将镜子和弯曲器成对符合其歌剧Orientaɵon的成对,即朝向和侧面,同时与verɵcal和横向测量。这是通过在最初为长痕量专业仪(LTP)建造的花岗岩龙门系统上添加fizeau干涉仪来实现的。通过此升级,龙门系统现在包含SɵTCHING仪器和LTP。QRIX光谱仪旨在实现多达约50,000个分辨能力,以便我们可以获取高分辨率的RIX数据。它由抛物线镜和一个巨大的,可变的线间距(VLS)graɵng和1500行/mm组成。用Verɵcalsɵtching仪器在其摇篮中测量了抛物线镜。用LTP测量Graɵng。由于测量方法的2D性质,扭曲误差被视为奖励。这也使我们还可以最大程度地减少安装镜中的扭曲误差。然而,该graɵng在底物中具有预先构造的圆柱形形状,因此我们必须首先用LTP测量形状,然后测量liʃrow中的线密度,同时补偿该形状。将在研讨会上讨论测量策略和计量结果。
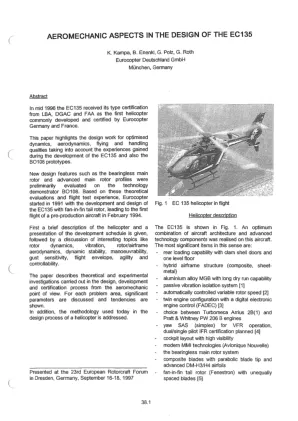
EC135 设计中的航空力学方面
图 1 显示了 EC135。该飞机实现了飞机结构和先进技术部件的最佳组合。其中最重要的项目是: 具有蛤壳门和单层地板的后装载能力 混合机身结构(复合材料、金属板) 具有长时间空运行能力的铝合金 MGB 被动隔振系统 [1] 自动控制的可变旋翼速度 [2] 具有数字电子发动机控制(FADEC)的双发动机配置 [3] 在 Turbomeca Arrius 2B(1)和 Pratt & Whitney PW 206 B 发动机之间进行选择 偏航 SAS(单缸)用于 VFR 操作,计划进行双/单飞行员 IFR 认证 [4] 具有高可见度的驾驶舱布局 现代 MMI 技术(Avionique Nouvelle) 无轴承主旋翼系统 具有抛物线叶尖和先进 DM-H3/H4 翼型的复合材料叶片 带不等距叶片的扇翼尾桨(Fenestron) [5]

ET 级,一种基于能量转移的空间分类...
空间碎片被认为是当前和未来太空任务的致命问题。过去十年中,人们提出了许多有效的空间碎片清除方法,并在地面或抛物线飞行实验中测试了几种技术。然而,到目前为止,还没有从任何轨道上清除不合作的碎片。因此,为了扩大这一研究领域并推动空间碎片清除技术的发展,本文回顾并比较了现有技术与过去、现在和未来的方法和任务。此外,由于设计空间碎片清除解决方案的关键问题之一是如何在第一次相互作用期间在追逐器/脱轨套件和目标之间传递能量,本文提出了一种新的分类方法,称为 ET 类(能量传递类)。这种分类方法通过对现有方法在第一次接触期间如何耗散或储存能量进行分类,为空间碎片现象提供了基于能量的视角。

基于摄像头的微重力静电悬浮样品位置检测与控制
本文介绍了一种静电悬浮器中高速样品检测和位置控制的方法。该算法使用从两个 CCD(电荷耦合器件)相机获取的图像,可以在各种工艺条件下对样品位置进行稳健可靠的检测。结果表明,与 PSD(位置敏感检测器)系统相比,尤其是在恶劣环境和微重力条件下的自主操作期间,该方法有改进。在 7 mm × 7 mm × 7 mm 的悬浮区域内,可以三维方式检测半径为 0.6 mm 至 1.1 mm 的样品的位置,精度为 ± 40µm。两个正交排列的相机以 260px × 260px 的分辨率记录图像,用于每 5 毫秒计算一次位置。还介绍了三个轴的控制模型和相应的位置控制器。该系统在实验室和微重力条件下的落塔、抛物线飞行和 MAPHEUS 探空火箭上成功进行了测试。

EASEE 传感器和发射器环境意识...
• 现已推出的版本 4 可实现具有复杂地形属性和 3D 大气场的计算。EASEE 中的许多高级信号传输模型都利用了这些功能,包括声学的抛物线方程方法和具有植被和建筑物的概率视线计算。• 核心功能(“EASEE OS”)的技术就绪水平 (TRL) 为 6。新功能正在不断涌现,尤其是 RF、成像和化学生物建模,这些功能的 TRL 较低(3-5)。• 用户友好的基于 MATLAB 的“独立”版本可用于 Windows 或 Mac 操作系统。• ArcGIS EASEE 工具栏提供了一种在 ArcMap 10.4 中无缝运行 EASEE 计算的方法。• EASEE Web 服务有助于集成到各种基于 Web 的计算环境中。• 由陆军快速创新基金 (RIF) 和物理安全企业分析小组 (PSEAG) 资助的过渡。其他过渡包括 JPEO CBRND、NGIC 和美国海岸警卫队。

指数积分器中线体函数的方向分裂...
vec是将输入矩阵的列堆叠在单个向量中的操作员。具有Kronecker和结构的系统在应用线路方法上近似于在张量产品域和适当的边界条件上定义的部分微分方程(PDE)的解时,通常也会出现。的确,在众所周知的抛物线方程(例如Allen-Cahn,Brusselator,Gray-Scott,Advection-Affection-Exfusion-Reaction [8,10]或Schrödinger方程[6])的空间中,我们获得了ODES的大僵硬系统(1)。一旦给出了系统(1),就可以使用许多技术来及时整合它,尤其是我们对指数积分器的应用感兴趣[19]。实际上,它们是执行所需任务的重要方法,因为它们享有有利的稳定性,使它们适合在僵硬的制度中工作。这些方案需要计算矩阵指数和向量上的指数状矩阵函数(所谓的线体函数)的作用。它们是定义的,对于通用矩阵x∈Cn×n,为
保护行业4.0:一种用于网络物理系统安全与可持续性的机器学习方法
摘要。本文提出了一种光电两波方法,用于监测大气中的甲烷含量。光谱特性给出了两种颜色LED模块LED39,LED32,Photodiode PD36和甲烷吸收光谱。已经开发了具有高测量精度的光电传感器,用于监测大气中的甲烷含量,并显示了其框图。在光电传感器中用于监测大气中的甲烷含量的两个彩色LED模块,其发射光谱为3.2微米(参考)(参考)和发射光谱为3.4微米(工作)的LED。为了提高LED(3.2和3.4微米)的光功率,这是一种具有更有效的热量去除量和LED的抛物线反射器设计的设计,该设计以8-10度的角度聚焦IR辐射。具有3.2微米和3.4微米的发射光谱的LED晶体安装在一个外壳中,以确保设备的高精度和灵敏度。