XiaoMi-AI文件搜索系统
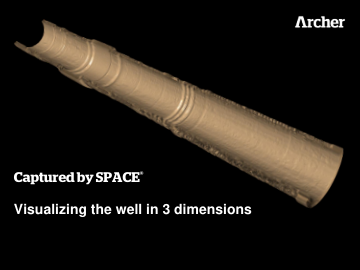
World File Search System拍摄

VLBI 拍摄遥远类星体的图像 - 喷气推进实验室
数十亿光年外的类星体图像是甚长基线干涉测量 (VLBI) 空间天文台计划的惊人初步成果之一,这是一种新型天文学任务,它使用卫星和地面无线电天线的组合来创建比地球更大的望远镜。日本宇宙航空科学研究所 (ISAS) 于 1997 年 2 月发射的无线电干涉测量任务的初步结果发表在 9 月 18 日的《科学》杂志上。JPL 是支持该任务的国际组织联盟的一部分,该联盟创建了有史以来最大的天文“仪器”——一个直径超过地球直径 2.5 倍的射电望远镜。作为有史以来最复杂的太空任务之一,太空 VLBI 为天文学家提供了迄今为止最清晰的宇宙视野之一。《科学》杂志的文章发布了四张新图像,所有图像都描绘了类星体,它们的辐射估计已经传播了数十亿年

通过间接激发进行拍摄的拍照-RSC Publishing
照片开关是在光线激发后在异构体之间可逆的分子。自然存在的光异构分子的关键例子是视网膜,它经历了吸收光子的z / e同组化,该光子启动了负责视觉的细胞信号传导级联。1 During the last century, chemists have designed a myriad of arti cial photoswitch structures: azobenzenes, 2 (sti ff -)stilbenes, 3 indi- goids, 4 diarylethenes, 5 norbornadienes/quadricyclanes, 6 spi- ropyrans/merocyanines, 7 and donor – acceptor Stenhouse adducts (DASAs), 8 to name一些(图1a)。同组化时开关变化的理化特性,并引起光反应函数。例如,可以利用Azobenzenes,Stilbenes和Indigoid的E - Z异构体来控制分子系统的超分子相互作用或将菌株诱导到宏观材料中。另一方面,日钟甲烯和螺旋形的电循环分别改变了这些分子的结合和偶极矩。这些现象可以在医学分子或宏观水平上运行的光响应系统中被利用,9个生物科学,10,11催化,12

为云拍摄:了解安排的结构如何影响会计
在探索迁移到基于云的技术的不同选项时,组织应考虑对这些安排会计的复杂性和细微差别。多亏了最近发布的云计算会计要求,无论基于云的技术的结构如何,有资格将资本的实施成本类型都一致。尽管承认实施成本的时间通常不受转型的性质影响,但在公司资产负债表和损益表上表现出这种成本的差异。这些差异取决于公司是否可以在没有罚款的情况下占有基础软件(从会计角度)以及是否可以在其或第三方的硬件上运行与软件供应商无关的硬件。换句话说,需要解决的主要问题是,该公司是否可以在其自己的服务器(或第三方的服务器)上运行软件,还是仅限于仅通过云访问技术?

WRAP 影响 BTI 引起的阈值电压偏移拍摄 ...
手稿版本:作者接受的手稿 WRAP 中呈现的版本是作者接受的手稿,可能与发布的版本或记录版本不同。 永久 WRAP URL:http://wrap.warwick.ac.uk/140044 如何引用:请参阅发布的版本以获取最新的书目引用信息。如果已知发布的版本,上面链接的存储库项目页面将包含有关访问它的详细信息。 版权和再利用:华威研究档案门户 (WRAP) 在以下条件下开放华威大学研究人员的这项工作。版权 © 和此处展示的论文版本的所有道德权利属于个人作者和/或其他版权所有者。在合理和可行的范围内,WRAP 中提供的材料在提供之前已经过资格检查。完整项目的副本可用于个人研究或学习、教育或非营利目的,无需事先许可或收费。只要注明作者、标题和完整的书目详细信息,并提供原始元数据页面的超链接和/或 URL,并且内容不会以任何方式更改。出版商声明:有关更多信息,请参阅存储库项目页面的出版商声明部分。有关更多信息,请联系 WRAP 团队:wrap@warwick.ac.uk。
VLBI 拍摄遥远类星体图像 - 喷气推进实验室
数十亿光年外的类星体图像是甚长基线干涉测量 (VLBI) 空间天文台计划的惊人初步成果之一,该计划是一种新型天文学任务,使用卫星和地面无线电天线的组合来创建比地球更大的望远镜。1997 年 2 月由日本宇宙航空科学研究所 (ISAS) 发射的无线电干涉测量任务的初步结果发表在 9 月 18 日的《科学》杂志上。JPL 是支持该任务的国际组织联盟的一部分,该联盟创建了有史以来最大的天文“仪器”——一个直径超过地球直径 2.5 倍的射电望远镜。作为有史以来最复杂的太空任务之一,太空 VLBI 为天文学家提供了迄今为止最清晰的宇宙视野之一。《科学》杂志的文章发布了四张新图片,这些图片均描绘了类星体,据估计,这些类星体的辐射已经传播了数十亿年

拍摄用于高级光学应用的纳米颗粒的荧光
具有增强的亮度和稳定性。3此外,当将无机NP还原为特定尺寸时,量子大小效应会诱导离散的能级,从而导致不同的效率。传统上,人们认为,在光激发下连续从NP发射uerSence,这表现为明亮的状态(“ 1”)。但是,有一些有趣的现象不符合这种情况。例如,在量子点(QD)中发现了杀性状态的随机闪烁状态。4,5这种随机闪烁的行为表明usecence可以在明亮状态('1')和黑暗状态('0')之间随机切换。显然,QD的闪光的闪烁特征提供了其他信息,这也使他们的创新
无人机拍摄的高分辨率航拍图像可用于森林应用
因此,标准空中三角测量方法通常无法处理使用 UAV Haala 2012 获取的图像。现在有各种开源和商业密集立体匹配工具可用于应对这些挑战。采用源自计算机视觉并广泛用于近景摄影测量或地面摄影的算法(特征检测 SIFT、SfM)(Lowe 2004、Bryson 2010、Hauagge 2012)。以高度自动化的方式,可以估计相机几何形状并从一组重叠图像中计算 3D 模型,且不受尺度、方向、失真和照明变化的影响(Neitzel 2011、Turner 2012)。图像匹配得到的点云可以以与机载或地面激光扫描得到的点云类似的方式进行进一步处理,并且通常与激光扫描数据相结合。
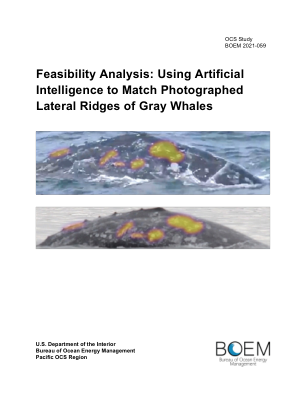
可行性分析:利用人工智能匹配拍摄的灰鲸侧脊
图 1。从我们的灰鲸模型中自动提取的曲线。末端的误差与 CurvRank 在海豚背鳍上的行为一致,匹配明显更准确。尽管显示出提取灰鲸背脊边缘的一致能力,尽管存在一些错误(如上图所示),但 CurvRank v2 在匹配这些边缘方面并不是很有效,前 1 名的准确率为 20%,上升到前 20 名的准确率仍然低于 50% --- 事实上,在我们的测试数据集上,每个个体至少有 2 次目击,准确率为 43.5%,如下图所示。我们不确定准确率如此低的原因,但我们使用 CurvRank v2 和这些数据进行的大量实验产生了类似的结果,因此我们认为这可能只是算法在计算视觉特征时拟合不佳。
无人机拍摄的高分辨率航拍图像可用于森林应用...
因此,标准空中三角测量方法通常无法处理使用 UAV Haala 2012 获取的图像。现在有各种开源和商业密集立体匹配工具可用于应对这些挑战。采用计算机视觉算法(特征检测 SIFT、SfM),广泛用于近距离摄影测量或地面摄影(Lowe 2004、Bryson 2010、Hauagge 2012)。可以以高度自动化的方式估计相机几何形状并从一组重叠图像中计算 3D 模型,不受比例、方向、失真和照明变化的影响(Neitzel 2011、Turner 2012)。图像匹配产生的点云可以以与机载或地面激光扫描产生的点云类似的方式进行进一步处理,并且通常与激光扫描数据相结合。