XiaoMi-AI文件搜索系统
World File Search System控制信号


Hongquan Le 可持续性报告
博士学位候选人Hongquan Le监督员Gursel Alici教授,Geoff Spinks教授,Het Panhuis的Marc教授。研究主题使用机器学习技术识别和翻译假肢用户的意图为自然控制信号。研究突出显示了直观且可靠的三阶段管道接口,用于识别和翻译跨性肌电假体手用户意图为控制信号,这对SEMG非平台和最小用户培训要求很强。研究兴趣:生物医学信号处理。人机界面,应用机器学习和深度学习,多视图学习,域适应性,电子和嵌入式系统。

可逆和量子中的 Fredkin 门......
在过去的 25 年中,出现了一些重要的发展,这些发展为改进合成方法做出了贡献。从硬件角度来看,最相关的是计算机速度的提高和内存容量的增加。这为包括搜索 [12]、进化算法 [7]、[8]、[10] 或 SAT 求解器 [17] 在内的可逆/量子电路的合成提供了可能性。在软件方面,可以提到专门的高效库的开发。在门级别,可以提到使用值 0 作为控制信号,用“白点” [23]、[14] 标识,通常称为“混合极性”,以及使用不相交控制信号 [13]、[15]。接下来,将分析 Fredkin 门在可逆域中的“推广”及其在量子域中的相关应用。值得一提的是,在[5]中使用了“广义弗雷德金门”这个术语,指的是具有多条控制线的弗雷德金门。

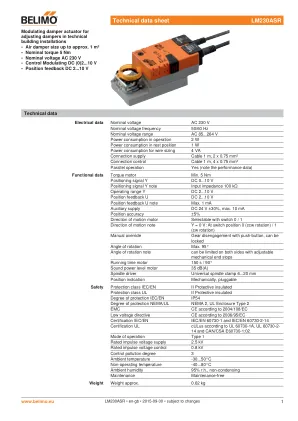
技术数据表 LM230ASR - Odilon Plus
操作模式 执行器与 DC 0...10V 标准调制信号相连,并驱动至定位信号定义的位置。测量电压 U 用于阻尼器位置 0...100% 的电气显示,并作为其他执行器的从属控制信号。

DM320C - CNCShop.cz
1. 简介、特点和应用...................................................................................................... 1 简介...................................................................................................................... 1 特点...................................................................................................................... 1 应用...................................................................................................................... 1 2. 规格...................................................................................................................... 2 电气规格...................................................................................................................... 2 机械规格...................................................................................................................... 2 散热...................................................................................................................... 2 工作环境和其他规格.................................................................................................... 3 3. 引脚分配和说明.................................................................................................... 3 连接器 P1 配置.................................................................................................... 3 选择有效脉冲边沿和控制信号模式..................................................................... 4 连接器 P2 配置.................................................................................................... 4 4. 控制信号
使用说明书 型号 136 直流放大器 IM136
1.1 简介 自 1951 年以来,ENDEVCO 一直是振动测量领域的领导者,并在振动传感器设计方面做出了许多贡献。其中包括:第一个能够在低温至 +750°F 的温度下连续工作的压电加速度计、第一个剪切设计加速度计和世界上最小的压电加速度计。为了支持广泛的振动传感器系列,ENDEVCO 提供了各种各样的信号调节器,包括第一个晶体管电荷放大器、第一个计算机可编程电荷放大器和第一个基于真正数字跟踪滤波器的机载振动监测系统。信号调节器 为了支持其传感器在大规模测试中的使用,ENDEVCO 开发了几代信号调节器系统。直到最近,最先进的振动实验室还由一排手动控制信号调节器组成。这些信号调节器具有手动控制的开关和旋钮,用于设置满量程范围、灵敏度和滤波器角,并且设置信息是手动记录的。计算机控制信号调节器为了消除放大器设置不正确的风险,ENDEVCO 率先提出了计算机控制信号调节器的概念。第一代是多通道放大器控制系统 (MAC)。第二代是计算机控制放大器系统 (CCAS)。CCAS 系列由五个不同的系统组成,它们使用相同的机架和带有不同模拟板的数字接口组件。这些单元通过 IEEE-488 接口总线从计算机/控制器接收设置命令,以便可以预先编程测试。此外,这些设备提供全面的自检和自校准功能,大大提高了测试数据的可靠性。用户反馈表明,这些设备通过缩短测试周期、防止重新测试和消除过度测试,很快就收回了成本。手动/计算机控制信号调节器 前两代计算机控制放大器的经验现已应用于第三代产品线:可编程桥式调节器和可编程实验室信号调节器。这些设备是独立控制的,每个设备都包含自己的电源,以确保单通道完整性。型号 136 具有手动和计算机可编程功能。这款直流放大器是 Endevco 致力于改进最先进的传感测量技术的一个例子。新一代产品体积更小,功能更多,并将继续扩展以满足日益广泛的应用需求。

TFP401A-Q1 TI PanelBus ™ 数字接收器... 数据表
TFP401A-Q1 是一款兼容数字视频接口 (DVI) 的 TMDS 数字接收器,用于数字平板显示系统接收和解码 TMDS 编码的 RGB 像素数据流。在数字显示系统中,主机(通常是 PC 或工作站)包含兼容 TMDS 的发射器,用于接收 24 位像素数据以及适当的控制信号。主机将数据和控制信号编码为高速低压差分串行比特流(适合通过双绞线电缆传输)到显示设备。显示设备(通常是平板显示器)需要兼容 TMDS 的接收器(如 TI TFP401A-Q1)将串行比特流解码回主机发出的相同 24 位像素数据和控制信号。然后,解码后的数据可直接应用于平板驱动电路,以在显示器上产生图像。主机和显示器之间的距离可达到 5 米或更长,因此最好采用像素数据的串行传输。要支持高达 UXGA 的现代显示分辨率,需要具有良好抖动和偏差容差的高带宽接收器。
个性化慢性适应性深部脑刺激在治疗帕金森病方面优于常规刺激
深部脑刺激是一种广泛用于治疗帕金森病 (PD) 的方法,但目前缺乏对不断变化的临床和神经状态的动态响应。反馈控制有可能提高治疗效果,但“自适应”神经刺激的最佳控制策略和其他好处尚不清楚。我们在三名 PD 患者(五个半球)的正常日常生活中实施了由丘脑底核或皮质信号控制的自适应丘脑底核刺激。我们使用数据驱动的宽频率范围和不同刺激幅度的场电位分析来确定残余运动波动的神经生理生物标志物。任一部位的窄带伽马振荡(65-70 Hz)成为刺激期间感知的最佳控制信号。一项盲法随机试验表明,与临床优化的标准刺激相比,运动症状和生活质量有所改善。我们的方法凸显了基于数据驱动的控制信号选择的个性化自适应神经刺激的前景,并可能应用于其他神经系统疾病。