XiaoMi-AI文件搜索系统
World File Search System放置

通过自适应奖励通过加强学习来学习电路放置技术
摘要 - 安装是印刷电路板(PCB)物理设计的第一步,并且需要大量的时间和域专业知识。放置质量会影响子分析任务的性能,并且最佳位置的产生至少是NP兼容。虽然随机优化和分析技术取得了一定的成功,但它们通常缺乏对人类工程师的直觉理解。在这项研究中,我们提出了一种新颖的端到端机器学习(ML)方法来学习基本的放置技术并利用经验来有效地优化PCB布局。为了实现这一目标,我们将PCB放置问题作为马尔可夫决策过程(MDP),并使用加固学习(RL)学习通用位置技术。代理驱动的数据收集过程产生了足以在自适应奖励信号的指导下学习通用政策的高度多样性和一致的数据点。与看不见的电路的最新模拟退火方法相比,经过TD3和SAC训练的由此产生的策略平均降低了路由后线长度的17%和21%。定性分析表明,这些政策学习了基本的放置技术,并证明了对潜在问题动态的理解。共同证明了新兴的协作或竞争行为以及更快的放置融合,有时超过数量级。索引术语 - 电路布局,放置,加固学习

机器人臂的视觉伺服算法,用于拾取和放置应用
机器人臂是由连接接头连接的链路的移动链组成的设备。电动机经常用于移动每个机器人臂接头。可以在空间中自由移动的最终效应器通常连接到固定的机器人平台的一端。机器人武器可以以速度和精度进行重复操作,远远超过了人类操作员。如今,机器人臂系统在全球范围内广泛使用,以提高行业制造过程的质量和效率。 机器人臂系统的典型应用是组装,绘画,焊接,拾取和放置操作等。 此外,许多行业都采用机器人武器来从事各种工作,例如选择和推杆,绘画和材料处理。 但是,完成这些工作的最具挑战性的问题之一是确定机器人部门最终效力器的目标位置。 有两种分析机器人臂运动的方法:前进和逆运动分析。 基于Visual Servo算法,本研究使用反向运动学来执行挑选和放置操作。 首先,实现了一种对象识别算法来识别要掌握的对象。 然后,避免发生任何障碍的算法。 研究的发现表明,在所有三种算法中都获得了良好的系统性能:首先,对象识别算法,第二,障碍避免算法,最后是基于Visual Servo的挑选和位置操作。 因此,可以得出结论,机器人臂的视觉伺服算法适用于采摘应用。如今,机器人臂系统在全球范围内广泛使用,以提高行业制造过程的质量和效率。机器人臂系统的典型应用是组装,绘画,焊接,拾取和放置操作等。此外,许多行业都采用机器人武器来从事各种工作,例如选择和推杆,绘画和材料处理。但是,完成这些工作的最具挑战性的问题之一是确定机器人部门最终效力器的目标位置。有两种分析机器人臂运动的方法:前进和逆运动分析。基于Visual Servo算法,本研究使用反向运动学来执行挑选和放置操作。首先,实现了一种对象识别算法来识别要掌握的对象。然后,避免发生任何障碍的算法。研究的发现表明,在所有三种算法中都获得了良好的系统性能:首先,对象识别算法,第二,障碍避免算法,最后是基于Visual Servo的挑选和位置操作。因此,可以得出结论,机器人臂的视觉伺服算法适用于采摘应用。
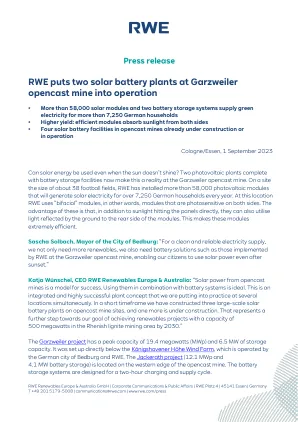
RWE在Garzweiler Opencast矿山上放置了两个太阳能电池厂
即使太阳不发光,也可以使用太阳能吗?两种配有电池存储设施的光伏植物现在使这在Garzweiler Opencast矿山成为现实。在大约38个足球场的站点上,RWE安装了超过58,000个光伏模块,每年将为7,250多个德国家庭发电。在此位置,RWE使用“双面”模块,换句话说,两侧都具有光敏的模块。这些优点是,除了直接撞击面板外,它们还可以利用地面反射到模块后侧的光。这使这些模块非常有效。贝德堡市市长Sascha Solbach Sascha Solbach:“要获得清洁可靠的电力供应,我们不仅需要更多的可再生能源,而且还需要电池解决方案,例如RWE在Garzweiler Opencast矿山实施的电池解决方案,即使在日震惊之后,我们的公民也能够使用太阳能。” Rwe Renewables欧洲和澳大利亚首席执行官KatjaWünschel:“ Opencast Mines的太阳能是成功的典范。 将它们与电池系统结合使用是理想的选择。 这是一个集成且非常成功的植物概念,我们正在同时在多个位置实践。 在短时间内,我们在Opencast矿场上建造了三个大型太阳能电池电厂,另外一个正在建设中。 它直接在KönigshovenerHöhe风电场下方设置,该风场由德国城市贝德堡和RWE经营。 Jackerath Project(12.1 MWP和4.1 MW电池存储)位于OpenCast矿山的西边缘。Sascha Solbach:“要获得清洁可靠的电力供应,我们不仅需要更多的可再生能源,而且还需要电池解决方案,例如RWE在Garzweiler Opencast矿山实施的电池解决方案,即使在日震惊之后,我们的公民也能够使用太阳能。” Rwe Renewables欧洲和澳大利亚首席执行官KatjaWünschel:“ Opencast Mines的太阳能是成功的典范。将它们与电池系统结合使用是理想的选择。这是一个集成且非常成功的植物概念,我们正在同时在多个位置实践。在短时间内,我们在Opencast矿场上建造了三个大型太阳能电池电厂,另外一个正在建设中。它直接在KönigshovenerHöhe风电场下方设置,该风场由德国城市贝德堡和RWE经营。Jackerath Project(12.1 MWP和4.1 MW电池存储)位于OpenCast矿山的西边缘。代表了我们朝着我们实现可再生能源项目的目标,到2030年,在Rhenish褐煤采矿区的容量为500兆瓦。” Garzweiler项目的峰值容量为19.4兆瓦(MWP)和6.5兆瓦的存储容量。电池存储系统设计用于两个小时的充电和供应周期。

强制力导向放置:一种用于大图可视化的新算法
摘要 – 图形可视化是一种帮助用户基于人类感知轻松理解连接数据(社交网络、语义网络等)的技术。随着大数据的盛行,这些图形往往太大,无法仅凭用户的视觉能力进行解读。导致此问题的主要原因之一是节点离开可视化空间。人们已经进行了许多尝试来优化大型图形可视化,但它们都有局限性。在这些尝试中,最著名的是力导向放置算法。该算法可以为中小型图形提供漂亮的可视化效果,但当涉及到较大的图形时,它无法将一些独立节点甚至子图保留在可视化空间内。在本文中,我们提出了一种名为“强制力导向放置”的算法。该算法通过提出更强大的力函数来增强经典的力导向放置算法。我们将其命名为“FForce”,它可以在达到平衡位置之前将相关节点拉近彼此。这帮助我们获得了更多的显示空间,并使我们能够可视化更大的图形。

MRI 中植入物射频加热测量过程中传感器放置的重要性
在实验中评估 MRI 扫描期间植入物的安全性时,传感器放置的位置至关重要。使用测量和有限元建模的组合来评估测量对传感器放置的敏感性,以评估一组校准圆柱体末端的温度升高。模拟使用 COMSOL Multiphysics 创建的耦合热电磁模型来虚拟复制测量条件。评估了不同长度和直径的圆柱形植入物的参数模型中的热梯度,以量化在估计的温度测量不确定度内测量植入物加热所需的传感器放置精度。通过这种方式,我们旨在增强对 MRI 中植入物加热的实验程序和安全标准的要求的理解。
PRC-005-7 - 保护系统,自动放置和突然的压力中继维护
本报告概述了国家气象局宣布的Derecho风暴,该风暴于6月13日至14日,2022年6月13日至14日在俄亥俄州哥伦布地区,随后于6月14日至15日举行的载荷脱落活动。在暴风雨结束后,哥伦布和俄亥俄州东部有记录和近历史的高温。创纪录的高温将哥伦布地区的功率需求提高到高于正常水平。在美国电力(AEP)区域,Derecho风暴流离失所,并导致许多69 kV传输线和变电站,许多138 kV线和变电站以及一条345 kV的传输线。由于哥伦布地区周围的强迫传输发生故障以及由于暴风雨后炎热和潮湿的条件而增加的需求,因此AEP在其余的当地传输设施上经历了比正常负载重的重量。在可能的情况下,AEP和PJM利用传输系统重新配置并重新划分生成,以减少实际的过载和偶然的过载。最终,为了减轻系统问题,PJM于6月14日实施了100兆瓦的需求响应(非公司负载),哥伦布都会区的500兆瓦AEP负载,以及6月15日的450兆瓦。本报告确定了涉及此事件的两个观察结果。第一个是AEP和PJM之间的活动的密切协调,并建议在行动后进行联合。第二个观察涉及与植被位移有关的暴风雨活动。该观察结果有四个相关的暴风雨建议,这些建议将有助于减少植被影响。

用超保守的元素数据澄清Eupoinae Maddison的系统发育放置
supfoinae maddison,2015年是一群来自东南亚的小叶叶式跳跃蜘蛛。尽管以前的分子植物遗传研究表明,它是跳跃蜘蛛中的基底(非甲状腺素)谱系之一,但其确切的位置尚不清楚。在这项研究中,从主要的盐族谱系中收集了超保存的Element数据,以研究所有盐酸亚家族的系统发育关系,并特别关注欧盟Poinae的放置。结果为跳跃蜘蛛亚家族提供了良好的系统发育,并提出了Eupoinae与Spartaeinae Wanless的姐妹关系,1984年是跳跃蜘蛛的基础谱系,具有相对较高的物种多样性以及形态学和行为多样性。随着eupoinae的放置,我们解决了所有盐酸亚科的关系船,为跳跃蜘蛛的进化研究提供了强大的框架。

评估后上颌肺泡骨的立即植入物放置:定量和定性分析
抽象目标本研究的目的是评估后上颌牙槽骨尺寸并比较男性和女性中的这些维度。材料和方法样品由62名男性患者(平均年龄29.92 9.04岁)和40名女性患者(平均年龄29.70 9.54岁)组成102个锥形束计算的Tomog-raphy(CBCT)图像。测量了四个距离和三个密度;对方差和Mann - Whitney的U检验进行了多元分析,以比较性别之间的差异。第一个上颌磨牙的结果,在冠状宽度方面,男性和女性之间存在显着差异(分别为13.95 1.31和13.22 1.159 mm)和中间宽度(分别为14.28 1.28 1.43 1.43和13.57 1.478 mm)。但是,在高度(两者的7.93 3.8 mm)或顶宽度(两者的14.68 2 mm)方面尚无明显差异。Regarding the second maxillary molar, signi fi cant differences between males and females were found in terms of coronal width (14.66 1.63 and 13.54 1.512 mm, respectively), middle width (14.35 1.825 and 13.25 1.52 mm, respectively), and height (7.29 3.00 and 8.66 3.16 mm, respectively), whereas the gender关于顶部宽度的二态性具有边缘宽线(14.09 1.731 mm;p¼0.048)。在密度方面没有发现显着差异。结论第二上颌摩尔区域的最小平均牙槽骨高为7.29 30 mm,性别二态性显着。因此,应在立即植入物放置之前建议进行CBCT扫描。

使用无人机直升机拦截器和传感器放置规划技术的广域监视系统
摘要 本项目提出并描述了由传感器/拦截器放置规划和拦截无人机 (UAV) 直升机组成的广域监视系统的实施。给定一个区域的二维布局,规划系统基于最大覆盖范围和最小成本最佳地放置周界摄像机。该规划系统的一部分包括 Erdem 和 Sclaroff 的径向扫描算法的 MATLAB 实现,用于生成可见性多边形。此外,还针对固定和 PTZ 情况提出了二维摄像机建模。最后,还放置了拦截器以最小化检测事件期间到周界上任何一点的最短路径飞行时间。其次,设计和实施了无人机直升机的基本飞行控制系统。飞行控制系统的主要目标是当操作员握住自动飞行开关时,将直升机悬停在原地。该系统代表了完整航路点导航飞行控制系统的第一步。飞行控制系统基于惯性测量单元 (IMU) 和比例积分微分 (PID) 控制器。该系统使用运行 Windows XP 和其他商用现货 (COTS) 硬件的通用个人计算机 (GPPC) 实现。此设置不同于通常使用定制嵌入式解决方案或微控制器的其他直升机控制系统。实验表明,在给定多种摄像机类型和参数的情况下,传感器放置规划可以在优化成本下针对几个典型区域实现 >90% 的覆盖率。此外,直升机飞行控制系统实验在短飞行时间内实现了悬停成功。但最终结论是,COTS IMU 不足以满足直升机控制系统等高速、高频应用的需求。
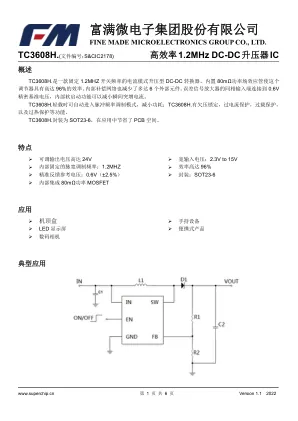
富满微电子集团股份有限公司
1 、电源走线包括 GND 、 SW 和 IN ,走线必须保证宽和短。 2 、 SW 、 L 和 D 开关的节点,布线要宽和短,以减少电磁干扰。 3 、输入和输出电容尽量贴近芯片放置。 4 、 R1 和 R2 和 FB 脚连线必须尽可能保证短。 5 、 FB 脚反应灵敏,应远离 SW 。 6 、芯片 GND 、 CIN 和 Cout 应连接较近,直接到地线层。