XiaoMi-AI文件搜索系统
World File Search System故障安全
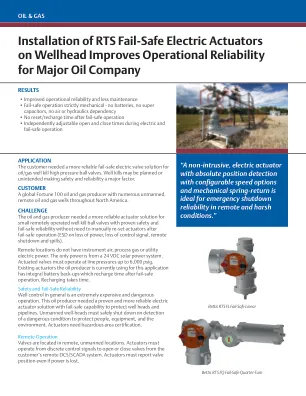
在井口安装 RTS 故障安全电动执行器可提高大型石油公司的运营可靠性
• 无刷直流电机,变频器控制,提供可配置的速度控制 • 低功耗 • 绝对位置检测 • 可挂锁的手动手轮 • 带霍尔效应(非接触式)本地控制站的 LCD 显示屏,带有开-停-关和本地-远程选择旋钮以及连续位置指示 • 显示非侵入式设置和执行器参数 • 5+1 个二进制输入(24 VDC、48 VDC 和 60 VDC) • 8 个可配置数字输出 - ESD 就绪、打开和关闭位置、运行关闭和运行打开方向、过扭矩、选择开关处于本地或远程位置 • 微处理器连续监控所有机械传动系统组件,处于通电和故障安全模式,本地显示本地警报和远程信号 • PST 自动测试模式可将阀门关闭 5%,同时远程开启和关闭功能仍然有效 • 可调故障安全时间使用无摩擦装置(无磨损)的涡流制动器来保护阀门 • 用于现场接线的单独端子室可防止电子设备暴露在环境中 • UL、CSA、ATEX 和 IECEx 认证• 维护间隔长 – 10,000 至 20,000 个运行小时(5 年),艾默生交付后 10 年 • 两年保修

在针硅二极管上的保险丝二极管整体整合,用于新的故障安全转换器拓扑
在发生内部短路的情况下,使用Dual-Fuse和Auxilariary Crowbar开关断开故障的腿,然后是备用腿(图。1,红色虚线框)自发连接,从而可以连续操作。为了提高系统的可靠性和紧凑性,可以在功率半导体[5],[6]组件(IGBTS,MOSFET等)上单层整合使用的熔断器,如图1(Fuse-On-transistor,蓝色虚线框)。在功率上的保险丝的集成分两个步骤进行了半导体组件。首先,熔断器,称为“独立保险丝”(图1,绿色虚线盒),由硅基板上的薄铜层(18 µm)制成,以研究组件的热和电气行为。

实现和分发协调世界时到美国关键基础设施系统的弹性架构:美国国家标准与技术研究所 (NIST) 的方法和建议
I.B.2.1 报警系统和值班人员 ......................................................................................57 I.B.2.2 默认故障安全 ................................................................................................57 I.B.2.3 冗余和可靠性 ................................................................................................57 I.B.2.4 时钟健康遥测 ......................................................................................................58 I.B.2.5 环境控制 .............................................................................................................58 I.B.2.6 电源冗余 .............................................................................................................58 I.B.2.7 预防性维护 .............................................................................................................58

专业测绘无人机 - 地理匹配
eBee 的 eMotion 软件实时显示飞机的关键飞行参数、电池电量和图像采集进度,而 eBee Ag 自动驾驶仪内的人工智能则不断分析机载 IMU 和 GPS 数据,以控制和优化无人机飞行的各个方面。这款专有自动驾驶仪还管理各种智能故障安全行为,进一步提高安全性。

— TZIDC 数字定位器 - ABB
气动装置 I/P 模块和后续气动放大器用于控制气动执行器。久经考验的 I/P 模块按比例将来自 CPU 的永久电气设定点信号转换为用于调节 3/3 通阀的气动信号。用于加压或减压执行器的空气流量剂量不断调整。因此,可实现出色的控制效果。达到设定点时,3/3 通阀在中间位置关闭,以最大限度地减少空气消耗。气动系统可提供四种版本:用于单作用和双作用执行器,每种版本都具有“故障安全”/“故障冻结”安全功能。“故障安全”安全功能 如果电源发生故障,定位器输出 1 会减压,气动执行器中的复位弹簧会将阀门移至安全位置。如果是“双作用”版本,输出 2 会额外加压。“故障冻结”功能 如果电源发生故障,定位器输出 1(和输出 2,如果适用)会关闭,气动执行器会将阀门锁定在当前位置。如果压缩空气供应电源发生故障,定位器会给执行器减压。
ThermaScope® HDT | jp innovatec
标准系统 Thermoteknix 专有 ThermaScope HDT 红外摄像机 空气冷却 316 不锈钢外壳 自动故障安全气动摄像机机构 带自动关闭机构的壁套 用于通信和服务的单一控制单元 全 LED 警报指示 空气软管、通信电缆 ThermaScope 软件 CD 和手册/LCD 显示器

Maxell All-Solid-State Battery + Nano Energy™协作委员会
尽管ROHM一直在努力提高产品可靠性和质量,但由于各种因素,半导管可能会分解和故障。因此,为了防止因失败而引起的人身伤害或火灾,请采取安全措施,例如遵守衍生特征,实施冗余和防火设计,并使用备份和备份程序和故障安全程序。Rohm对于由于Rohm指定的评级以外的使用我们的台阶而造成的任何损害均不承担任何责任。
Mohamed Naija、Rihab Khemiri、Ernesto Expósito。基于 NCES 的无人机危险分析和风险缓解故障安全机制。第 15 届国际软件技术会议,2020 年 7 月,法国巴黎。�hal-02613976�
摘要:近几年,无人驾驶飞行器 (UAV) 受到越来越多的关注,以执行各种应用,如军事、农业和医疗领域。众所周知,无人机不仅容易受到软件意外故障的影响,而且容易受到环境的影响。因此,安全性应在设计时被视为主要要求,因为飞行器的任何意外行为或任何危险都会导致潜在风险。为了在任务期间保持其安全运行,提出了一种基于网络条件事件系统 (NCES) 的故障安全机制。故障安全机制是一种控制逻辑,用于指导在发生危险时执行的风险降低措施。为了使用形式化模型生成这样的控制器,所提出的过程分为三个阶段:(1)第一阶段包括根据文献中的反应方法进行危险识别和分析,(2)第二阶段允许使用标准 ISO 13849 进行风险评估,以及(3)第三阶段包括执行重新配置场景以在分析安全要求的同时降低风险。使用形式化方法的动机是,事实证明,它们有助于在早期设计阶段确保开发过程的可靠性。我们以一个医疗无人机为例,展示了我们提案的适用性和可行性。