XiaoMi-AI文件搜索系统
World File Search System数据表示

第一章区块链技术概述
第一章区块链技术概述 1. 人工智能AI,区块链Blockchain,云计算Cloud 和数据科学Data Science。 人工智能:生产力变革。大数据:生产资料变革。区块链:生产关系变革。 2. 可信第三方: 交易验证,交易安全保障,历史记录保存->价格昂贵,交易速 度嘛,欺诈行为。 区块链: 去中心的清算,分布式的记账,离散化的支付。任 何达成一致的无信任双方直接交易,不需要第三方中介。注意:信用破产,绝 对中心化,不透明无监管。 3. 区块链: 用于记录比特币交易账目历史的数据结构,每个区块的基本组成都 由上个区块的散列值、若干条交易及一个调节数等元素构成,矿工通过工作量 证明来维持持续增长、不可篡改的数据信息。区块链又称为分布式账本,是一 种去中心化的分布式数据库。 区块链技术 是在不完全可信的环境中,通过构建 点对点网络,利用链式数据结构来验证与存储数据,借助分布式共识机制来确 定区块链结构,利用密码学的方式保证数据传输和访问的安全,利用由自动化 脚本代码组成的智能合约来编程和操作数据。 4. 体系结构:数据层: 封装了区块链的底层数据存储和加密技术。每个节点存 储的本地区块链副本可以被看成三个级别的分层数据结构:区块链、区块、区 块体。每个级别需要不同的加密功能来保证数据的完整性和真实性。 网络层: 网格网络,权限对等、数据公开,数据分布式、高冗余存储vs 轴辐网络,中央 服务器分配权限,多点备份、中心化管理。 共识层: 能够在决策权高度分散的 去中心化系统中使得各节点高效地针对区块数据的有效性达成共识。出块节点 选举机制和主链共识共同保证了区块链数据的正确性和一致性,从而为分布式 环境中的不可信主体间建立信任关系提供技术支撑。 激励层: 经济因素集成到 区块链技术体系中,包括经济激励的发行机制和分配机制等。公有链:激励遵 守规则参与记账的节点,惩罚不遵守规则的节点,使得节点最大化自身收益的 个体理性行为与保障去中心化的区块链系统的安全和有效性的整体目标相吻合, 整个系统朝着良性循环的方向发展。私有链:不一定激励,参与记账的节点链 外完成博弈,通过强制力或自愿参与记账。 合约层: 封装区块链系统的各类脚 本代码、算法以及由此生成的更为复杂的智能合约。数据、网络和共识三个层 次作为区块链底层“虚拟机”分别承担数据表示和存储、数据传播和数据验证功能, 合约层建立在区块链虚拟机之上的商业逻辑和算法,是实现区块链系统灵活编 程和操作数据的基础。智能合约是一个在计算机系统上,当一定条件被满足的 情况下,可以被自动执行的合约(程序)区块链上的智能合约,一是数据无法 删除、修改,保证了历史的可追溯,作恶成本很高,其作恶行为将被永远记录; 二是去中心化,避免了中心化因素的影响。 应用层: 区块链技术是具有普适性 的底层技术框架,除可以应用于数字加密货币外,在经济、金融和社会系统中 也存在广泛的应用场景。 5. 区块链特征 :去中心,去信任;开放,共识;交易透明,双方匿名;不可篡 改,可追溯。 区块链分类: 公有链: 无官方组织及管理机构,无中心服务器, 参与的节点按照系统规则自由接入网络、不受控制,节点间基于共识机制开展 工作。 联盟链: 由若干机构联合发起,介于公有链和私有链之间,兼具部分去 中心化的特性。 私有链: 建立在某个组织内部,系统的运作规则根据组织要求 设定,修改甚至是读取权限仅限于少数节点,同时仍保留着区块链的真实性和 部分去中心化特征。 无许可区块链: 一种完全去中心化的分布式账本技术,允 许节点自由加入和退出,无需通过中心节点注册、认证和授权,节点地位平等, 共享整个账本。 许可区块链: 存在一个或多个具有较高权限的节点,可以是可 信第三方,也可以是协商制定有关规则,其他节点只有经过相应授权后才可访 问数据,参与维护。 6. 数字货币:区块链1.0 旨在解决交易速度、挖矿公平性、能源消耗、共识方 式以及交易匿名等问题,参照物为比特币(BTC)。区块链2.0 旨在解决数据隐 私、数据存储、区块链治理、高吞吐量、域名解析、合约形式化验证等问题, 参照物为以太坊(ETH)。
人工智能:表示和问题解决
• 用于 CSP 的具有最小冲突启发式的迭代改进算法 • 爬山法(贪婪局部搜索) • 随机游走 • 模拟退火 • 束搜索 • 遗传算法 • 识别局部搜索算法的完整性和最优性 • 比较不同的局部搜索算法以及与

稀疏分布式表示
SDR 由数千个位组成,其中在任何时间点,一小部分位为 1,其余为 0。SDR 中的位对应于大脑中的神经元,1 表示相对活跃的神经元,0 表示相对不活跃的神经元。SDR 最重要的特性是每个位都有意义。因此,任何特定表示中的一组活跃位都编码了所表示内容的语义属性集。这些位没有标记(也就是说,没有人为这些位赋予意义),而是学习了位的语义意义。如果两个 SDR 在相同位置有活跃位,则它们共享这些位所表示的语义属性。通过确定两个 SDR 之间的重叠(两个 SDR 中均为 1 的等效位),我们可以立即看到两个表示在语义上如何相似以及它们在语义上如何不同。由于这种语义重叠特性,基于 SDR 的系统会自动根据语义相似性进行概括。
PowerPoint的标准表示
tckgen fods/fod_wm.nii.gz -fslgrad bvecs.bvec bvals.bval -seed_image rois/plic_r.nii.gz -include rois/prectentral rois/prectentral_r_dwi.nii.nii.nii.gz -include rois/pons/pons/pons_r.nii.grude。 rois/midsagittal_to_dwi.nii.gz -mask correction_diffusion_data/b0_brain_mask.nii.gz -force corticospinal_tract/cst_r.tck

知识表示和推理
2月5日,星期三(15H45)在B4.233室 +组织(14')2月6日,星期四(15h45)动机(72')2月11日,星期二(15H45)介绍(15H45)介绍(170')2月12日,星期三(170')在2月19日(星期三)(15h45)在P3E11开会1(2月24日)开始作业1(于2月24日);开始家庭作业2(在3月3)2月20日,星期四(15H45)建模(106')2月26日,星期三(15H45)在B4.233举行的会议;讨论家庭作业1 2月27日,星期四(15H45)语言(128'),星期二,3月。4(15H45)3月,3月。5(15H45)在B4.233举行的会议;讨论家庭作业2,开始作业3(将于3月 23)3月,星期三 12(15H45)在B4.233举行的会议; 3月13日(15H45)的开始项目工作(119')5(15H45)在B4.233举行的会议;讨论家庭作业2,开始作业3(将于3月23)3月,星期三12(15H45)在B4.233举行的会议; 3月13日(15H45)的开始项目工作(119')12(15H45)在B4.233举行的会议; 3月13日(15H45)的开始项目工作(119')

视觉表示对齐
在为人提供服务时,机器人需要优化与最终用户偏好保持一致的奖励。由于机器人将依靠原始的感知输入,因此他们的奖励将不可避免地使用视觉表示。最近,使用预训练的视觉模型的表示形式引起了人们的兴趣,但是在机器人技术中使这些工作的关键是微调的,这通常是通过动力学预测或执行时间周期矛盾的代理任务来完成的。但是,所有这些代理任务绕过了人类对他们重要的事物的输入,加剧了弹性相关性,并最终导致行为与用户偏好不一致。在这项工作中,我们建议机器人应利用人类的反馈将其视觉表示与最终用户保持一致,并解散该任务的内容。我们提出了representation-基于P参考的L奖(RAPL),这是一种通过基于偏好的学习和最佳运输的镜头来解决视觉表示对准问题和视觉奖励学习问题的方法。在X魔术和机器人手术中的实验中,我们发现Rapl的奖励始终产生具有较高样品效率的首选机器人行为,并在从不同的体现中学到与机器人的实现时显示出强烈的零光概括。
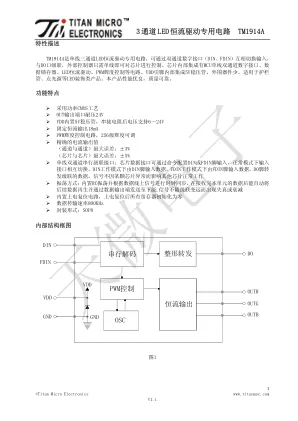
3通道LED恒流驱动专用电路TM1914A
功能说明 1、模式设置 本芯片为单线双通道通讯,采用归一码的方式发送信号。芯片接收显示数据前需要配置正确的工作 模式,选择接收显示数据的方式。模式设置命令共48bit,其中前24bit为命令码,后24bit为检验反码, 芯片复位开始接收数据,模式设置命令共有如下3种: (1)0xFFFFFF_000000命令: 芯片配置为正常工作模式。在此模式下,首次默认DIN接收显示数据,芯片检测到该端口有信号输 入则一直保持该端口接收,如果超过300ms未接收到数据,则切换到FDIN接收显示数据,芯片检测到该 端口有信号输入则一直保持该端口接收,如果超过300ms未接收到数据,则再次切换到DIN接收显示数据。 DIN和FDIN依此循环切换,接收显示数据。 (2)0xFFFFFA_000005命令: 芯片配置为DIN工作模式。在此模式下,芯片只接收DIN端输入的显示数据,FDIN端数据无效。 (3)0xFFFFF5_00000A命令: 芯片配置为FDIN工作模式。在此模式下,芯片只接收FDIN端输入的显示数据,DIN端数据无效。 2、显示数据

表示动态系统的无条件降解扩散模型的表示
摘要。我们提出了用于数据驱动的动力学系统的授予扩散模型。在这种类型的深度学习中,对神经网络进行了训练,以替代和扭转扩散过程,在该过程中,高斯噪声被从动力学系统的吸引子中添加到状态。迭代应用,神经网络可以将各向同性高斯噪声的样品映射到状态分布。我们展示了这种神经网络在Lorenz 1963系统的概念验证实验中的潜力。经过培训的状态发电,神经网络可以生产几乎与吸引子上的样本。该模型已经学会了系统的内部表示,适用于国家生成以外的不同任务。作为第一个任务,我们通过重新培训其最后一层并将其余网络保留为固定特征提取器,从而为预训练的神经网络提供了替代建模。在这些低维设置中,这种精细的模型的性能与从头开始训练的深度神经网络相似。作为第二个任务,我们应用预训练的模型来从确定性运行中生成合奏。扩散运行,然后迭代应用神经网络,条件状态生成,这使我们能够从运行的邻居区域中的吸引子中采样。为了控制所得的集合扩散和高斯性,我们调整扩散时间,从而调整吸引子的采样部分。虽然更容易调整,但此提出的集合采样器可以在集合最佳插值中胜过调谐的静态协方差。因此,这两个应用显示,降级扩散模型是代表动态系统学习的有前途的方法。