XiaoMi-AI文件搜索系统
World File Search System旋转模式
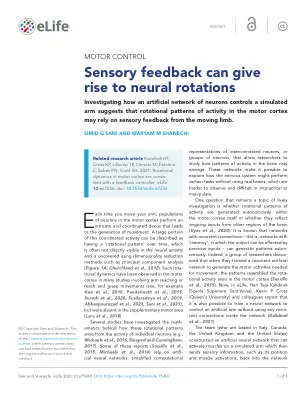
感觉反馈可引起神经旋转
每次你移动手臂时,运动皮层中的神经元群都会进行复杂而协调的舞蹈,从而产生运动。这种协调活动的大部分可以描述为随时间变化的“旋转模式”,这种模式通常无法在神经活动中直接看到,只能通过主成分分析等降维方法发现(图 1A;Churchland 等人,2012 年)。在许多涉及手臂伸展或伸展和抓握运动的研究中,已经在运动皮层中观察到这种旋转动力学(例如,参见 Kao 等人,2015 年;Pandarinath 等人,2015 年;Suresh 等人,2020 年;Susilaradeya 等人,2019 年;Abbaspourazad 等人,2021 年;Sani 等人,2021 年),但在辅助运动区却不存在(Lara 等人,2018 年)。一些研究已经调查了这些旋转模式如何从单个神经元活动中产生背后的数学原理(例如,Michaels 等人,2016 年;Elsayed 和 Cunningham,2017 年)。其中一些报告(Sussillo 等人,2015 年;Michaels 等人,2016 年)依赖于人工神经网络:简化的计算

使用高阶马尔可夫链和深度神经网络对作物特异性土地覆盖预测的评估
高阶马尔可夫连锁店(HOMC)是基于过渡概率的常规模型,美国农业部(USDA)国家农业统计局(NASS)使用,随着时间的推移研究农作物旋转模式。但是,由于分类数据表示为指示器(或虚拟)变量,因此请与稀疏性和识别能力问题相称。实际上,参数空间的维度与分析所需的人类所需的顺序相吻合。虽然简约的表示减少了参数的数量,如文献所示,但它们通常会导致预测较少。大多数简约的模型都经过大数据结构的培训,可以使用替代算法对其进行压缩并有效处理。因此,使用新的HOMC算法和在一系列农业条件上进行的深层神经网络(DNN)进行了彻底评估和比较,以确定哪种模型最适合于运营农作物特定土地涵盖美国农业(US)农业。在本文中,在2011年至2021年之间,六个神经网络模型从六个农业强化县进行了作物旋转数据,这些县反映了中西部和美国南部种植的主要农作物的范围以及各种农作物旋转模式。六个县包括:北达科他州的伦维尔;内布拉斯加州珀金斯;德克萨斯州黑尔;伊利诺伊州利文斯顿;伊利诺伊州麦克莱恩;和俄亥俄州的谢尔比。结果表明,DNN模型在2021年获得所有县的总体预测准确性较高。所提出的DNN模型允许摄入长时间序列数据,并且比被认为预测美国特定农作物特定土地覆盖的新的HOMC算法可鲁棒地实现更高的精度值。

艾德克斯200
• 每轴总动量存储:+/-1.5 至 +/- 6.0 mN.ms 每轴一个反作用轮 • 最大扭矩:0.1 mN.m • 三轴磁力矩器配置,磁偶极矩高达 0.4 A.m² • 外部接口可连接 6 个或更多太阳传感器 • 即发即弃控制 • 标准 I 2C 兼容接口。RS422、RS485 和 UART 为选配 • 即插即用设计 • 主要组件通过了高达 45 krad 的辐射耐受测试 • 内置指向模式:目标指向、太阳指向、天底指向、快速旋转模式(使用磁力矩器时最大 200°)和防翻滚 • 质量轻:400g(带 RW210.15 反作用轮) • 功率低(标称值):1.4W • 外形尺寸:95 x 90 x 32mm
医学工程冬季学校2025
由于技术的显着进步,假体不再是庞大的事物,主要是为了替代缺席的肢体的形状。特殊的材料技术(例如光刻)可以将假体的重量减少超过90%。此外,特定传感器技术的实施显着提高了任何运动的准确性和精度。最后,嵌入易于编程的微控制器允许假体及其佩戴者实现各种各样的复杂的旋转模式。如今,假肢是高科技设备,它具有佩戴者的独立性和自主权,从而大大改善了他们的生活质量。但是,在安装和磨损假体之前,必须进行多种模拟和测试以确保正确的功能。林茨应用科学上奥地利的医学工程系和国际务办公室很高兴欢迎您参加我们的年度冬季学校,为您提供为期5天的讲座,讲习班,实验室和文化活动的计划。我们衷心希望您喜欢与我们一起住宿,并找到一些时间来发现林兹 - 它是奥地利第三大城市,也是上奥地利省的首都。

构型步进限制实现了可调手性的近红外发光超分子势噻嗪有机框架
在此报告,报告了从三肽到Achiral网络超分子有机框架(SOF)的手性转移,基于构造式踩踏置构,它不仅显示了高度选择性的可逆性刺耳性转移(还显示出近来的nir nir nir cornir cornir cornir cornir cornir cornir cornir nir nir nir nir nir,Taking advantage of macrocyclic confinement, CB[8] separately encapsulated two kinds of tetracationic bis(phenothiazines) derivatives (G1, G2) at 2:1 stoichiometric to form organic 2D SOFs, efficiently enhancing 12.6 fold NIR luminescence and blueshifted from 705 to 680 nm for G1, and redshifted G2分别为695至710 nm。毫不偶然地,三种肽与两种非毒剂非共价框架(G1/CB [8]或G2/CB [8])表现出不同的圆二色性信号,其基于不同的结合模式和效果的奇异式旋转模式,并取得了良好的chirition contrirect and y ryflative contrirative trapprAMECTRAMEC,在G2/CB的量度最多46.2倍,量子产率(QY)从0.71%增加到10.29%[8],显示可逆性的手性转移和在热刺激下可调的NIR荧光。因此,当前的研究已实现了从三肽到SOF的可控手性转移,并增强了可调的NIR荧光的能力,后者成功地应用于热反应性手性手性逻辑门,信息加密和细胞成像中。

了解喀斯特农业系统中的微生物组 - 作品旋转联系:来自中国西南部的见解
了解土壤特性和微生物群落如何对农作物旋转的反应对于农业生态系统的可持续性至关重要。然而,关于农作物旋转如何改变地下微生物群落在喀斯特农业系统内有严重细菌的土壤中如何改变地下微生物群落的研究有限。这项研究调查了玉米,烟草和烟草 - 玉米旋转对中国西南部喀斯特地区土壤微生物群落的连续种植的影响。高通量测序用于评估土壤微生物群落结构对作物单栽培和旋转模式的反应。正如预期的那样,烟草旋转减轻了连续种植和降低土壤酸化的负面影响。烟草旋转也显着改变了微生物群落的组成,并通过促进了较高的有益微生物来促进植物的生长。主要细菌属鞘虫和盖氏菌,以及主要的真菌属植物和saitozyma被确定为对土壤生态系统健康至关重要的判别生物标志物。pH,可用的钾(AK)和可用的磷(AP)是与土壤微生物组组装有关的主要土壤因子。这项研究旨在证明农作物旋转与微生物组之间的关联,表明改变培养方式可以增强谷商的农业系统。
智能的Acoustofluidics启用了人脑器官的迷你比较反应器
摘要。大声液体提供了一种独特的手段来操纵细胞和液体,以在生物医学科学和转化医学中进行广泛应用。但是,由于多种因素,包括设备对设备变化,手动操作,环境因素,样本变异性等因素,标准化并保持当前流动性设备和系统的出色性能是一项挑战。在这里,为了应对这些挑战,我们提出了“智能的Acoustofluidics” - 一种自动化系统,涉及Acoustofluidic设备设计,传感器融合和智能控制器集成。作为一种概念证明,我们开发了基于人类脑器官培养物的基于智能的大量流体分解器。我们的迷你比较反应器由三个组成部分组成:(1)通过声学螺旋相位涡流方法进行无接触式旋转操作的转子,(2)用于实时跟踪旋转动作的摄像机,以及(3)基于增强学习的基于增强的学习控制器,用于旋转操纵的闭环调节。在训练基于增强学习的控制器和实验环境中,我们的迷你比率可以实现良好板中转子的自动旋转。重要的是,无论转子重量,液体体积和工作温度的波动如何,我们的迷你比较反应器都可以对转子的旋转模式,方向和速度进行良好的控制。此外,我们证明了我们的迷你比较反应器可以在长期培养过程中稳定地保持脑官的旋转速度,并增强脑官的神经分化和均匀性。与当前的Acoustofluidics进行了比较,我们的智能系统在自动化,鲁棒性和准确性方面具有出色的性能,突出了新型智能系统在生物电子学和微功能实验中的潜力。

量子稳定器代码的超对称性结构理论
我们研究了有限温度和边缘引起的对电荷和电流密度的影响,该电荷位于磁通量螺纹的2D锥形空间上。场算子在圆形边界上受约束,与圆锥形顶点,袋边界条件以及条件在术语前面的相反符号的条件约束。在二维空间中存在两个clifford代数的不相等表示,并为实现这些表示形式的两个字段提供了分析。圆形边界将锥形空间分为两部分,称为内部(I-)和外部(E-)区域。径向电流密度消失。对于一般的化学势情况,在两个区域中,电荷的预期值和方位角电流密度都明确分离。它们是磁通量的周期性功能和奇数功能,在磁通量和化学势的迹象的同时变化下。与文献中先前考虑的费米凝结物的重要差异是,当观测点趋于边界时,平均电荷和当前密度在极限中是有限的。在电子区域中,所有旋转模式都是规则的,总电荷和电流密度是磁通量的连续功能。在I区中,相应的期望值是在磁通量与通量量子之比的半数值下不连续的。这些不连续性来自I区中不规则模式的贡献。2D费米子模型,在奇偶校验和时间反向转换下(在没有磁场的情况下)结合了两个旋转磁场,意识到克利福德代数的不相等表示。讨论了这些模型中的总电荷和当前密度,以针对单独字段的边界条件的不同组合进行讨论。在2D Dirac模型描述的石墨锥中讨论了电子子系统的应用。

不同运动学对 JIZAI 镍钛旋转器械静态和动态扭转行为的影响:体外研究
背景/目的:使用传统方法检查镍钛旋转器械的静态扭矩与临床情况相矛盾,而且该方法对于顺时针和逆时针旋转运动的有效性值得怀疑。本研究旨在使用临床扭矩极限设置在静态/动态测试条件下检查不同运动学对 JIZAI 器械 (#25/.04) 扭转行为的影响。材料和方法:在静态测试中,将 JIZAI 的 5 毫米尖端固定在圆柱形虎钳中,并以自动扭矩反转、最佳扭矩反转 (OTR) 或往复 (REC) 进行连续旋转 (CR) 直至断裂(各 n Z 10)。在动态测试中,使用单长度技术使用 JIZAI 和 CR、OTR 或 REC 对直根管和严重弯曲根管进行器械治疗(各 n Z 10)。使用带有扭矩/力测量单元的自动塑形装置记录断裂时的静态扭矩、断裂时间 (T f )、动态扭矩和旋入力。使用单因素方差分析或带有 Bonferroni 校正的 Kruskal e Wallis 检验和 Mann e Whitney U 检验进行统计学分析 (⍺ Z 0.05)。结果:运动学不影响静态或动态扭矩 (P > 0.05);然而,确实影响直根管中的旋入力 (P < 0.05)。REC 具有明显较长的 T f ,而严重弯曲的根管在 CR 中产生明显更大的扭矩和旋入力 (P < 0.05)。结论:在目前的实验条件下,扭矩以外的参数对不同的运动学表现出明显的影响。 OTR 的动态扭矩和旋入力与其他旋转模式相似,不受管道弯曲度的影响。

智能声流体技术助力人类微型生物反应器
摘要 . 声流体技术结合了声学和微流体技术,为操纵细胞和液体提供了一种独特的方法,广泛应用于生物医学和转化医学。然而,由于多种因素,包括设备间差异、手动操作、环境因素、样品差异等,标准化和保持当前声流体设备和系统的优异性能具有挑战性。在此,为了应对这些挑战,我们提出了“智能声流体技术”——一种涉及声流体设备设计、传感器融合和智能控制器集成的自动化系统。作为概念验证,我们开发了基于智能声流体技术的微型生物反应器,用于人脑类器官培养。我们的微型生物反应器由三个组件组成:(1)通过声螺旋相涡旋方法进行非接触式旋转操作的转子,(2)用于实时跟踪旋转动作的摄像头,以及(3)基于强化学习的控制器,用于闭环调节旋转操作。在模拟和实验环境中训练基于强化学习的控制器后,我们的微型生物反应器可以实现转子在孔板中的自动旋转。重要的是,我们的微型生物反应器可以实现对转子的旋转模式、方向和速度的出色控制,而不受转子重量、液体体积和工作温度波动的影响。此外,我们证明了我们的微型生物反应器可以在长期培养过程中稳定地保持脑类器官的转速,并增强脑类器官的神经分化和均匀性。与目前的声流体相比,我们的智能系统在自动化、稳健性和准确性方面具有卓越的性能,凸显了新型智能系统在生物电子学和微流体实验中的潜力。