XiaoMi-AI文件搜索系统
World File Search System映像

通过有条件介绍红外图像中多级对象检测的生成数据增强
红外图像中的多级对象检测对于军事和平民使用很重要。深度学习方法可以获得高精度,但需要大规模数据集。我们提出了一个生成数据增强框架文档,用于使用有限数据的红外多级对象检测。本文的贡献是四倍。首先,Doci-Gan被设计为有条件的图像介绍框架,得出配对的红外多级对象图像和注释。其次,为文本到图像转换器配制了将文本格式对象注释转换为边界框掩码映像,从而导致增强是掩盖图像 - 图像 - 绘制图像图像翻译。第三,产生了基于多形态侵蚀的损失,以减轻对本地背景和全球背景的涂料不一致的不一致性。最后,为了生成各种图像,人工多级对象注释在增强过程中与真实的对象注释集成在一起。实验结果表明,具有高质量红外多级对象图像的文档增强数据集,从而提高了对象检测基准的准确性。

具有MMWave应用的可刺激糊状的高性能结构
移动通信领域(5G,6G),(自动)移动性和物联网(智能城市,可穿戴设备,对象跟踪,智能电网,视频安全性)的抽象发展在万维世界研究和工业环境中都是主题的。为此,需要更高的传输带宽,因此需要更高的工作频率> 60 GHz。为了能够利用这一潜力,需要新的技术来产生高频电路,而距离较窄的导体轨道在10-30 µm的范围内都可以实现较窄的距离。为此,在Fraunhofer Ikts开发了厚膜糊,可以使用紫外线将其照相,并可以实现所需的几何分辨率。目前的工作旨在概述Fraunhofer Ikts的可刺激性(PI)糊状物中的当前发展,并应比较PI Technologies。一方面是基于掩盖的PI工艺,适用于大规模生产,另一方面是激光直接成像(LDI)工艺,它提供了制造原型制造的可能性。关键词激光直接映像,LTCC,mmwave,可刺激的糊状,厚实的胶片糊。

图像生成AI模型基于对比度学习样式距离计算
摘要。本文提出了一种检索训练有素的图像生成洛拉(低级别适应性)模型的方法。此搜索算法采用单个任意图像输入,然后将模型在其中将图像转换为与输入映像相同的样式中的模型。我们使用三胞胎网络(带有三重损失的暹罗网络)采用了对比度学习方法。我们在预采用的洛拉模型上创建了一个示例图像集并执行了样式转移。使用这些传输的图像,对网络进行了微调,以通过其样式而不是通过其主题来计算距离;对于由不同的Lora模型转化的同一主题的一对图像对成对的差异很大,对于由同一LORA模型转换的不同下ject的图像对。通过准确评估任务评估了搜索算法,这些任务估计是否通过对模型进行排名的相同模型和用户实验进行了转换。实验结果表明,精细调整至关重要,样本图像集的多样性也很重要。

数字孪生驱动的绿色性能评估...
当前智能制造的设计、规划与实施主要从满足大规模定制需求、提升制造能力、创新商业模式等角度进行,应将环境和社会因素系统地融入智能制造的全生命周期。鉴于此,本文提出了一种数字孪生驱动的智能制造绿色绩效评估方法。数字孪生框架构建了物理实体与数字模型之间的双向映射和实时数据交互,为绿色绩效评估提供了全生命周期的全要素虚拟映像,满足了评估信息源和需求的监控和仿真要求。在数字孪生框架的驱动下,提出了一种基于模糊粗糙集AHP、多级权重综合和PROMETHEE II的混合MCDM模型作为智能制造绿色绩效评估的方法。在某空调企业远程运维服务项目绿色绩效评估研究中对模型进行了测试和验证。测试表明,提出的数字孪生驱动的混合模型能够获得稳定合理的评估结果。通过27种情景进行了敏感性分析,结果显示稳定性较高

高级软件开发人员和架构师 - JASON ERB
● 技术:C++、CMake、CPack、CTest、Boost、Google V8、Google Dawn、Google Omaha、JavaScript、Node API、WiX Toolset、Win32 API、Bash、Sockets、Linux、Windows、MacOS、Docker、Git、GitLab CI ● 贡献:Google Dawn、Google Omaha、Google V8、Uncrustify ● 架构、开发和拥有 DCP Native,这是分布式计算协议的本机层,使用户能够在 Ubuntu、MacOS、Windows 和 Docker 的 x64 和 arm64 变体上安装/配置/运行分布式计算机的工作器(通过多架构映像) ● 创建了基石跨平台、多线程、多进程、基于套接字的本机 V8 嵌入式 JavaScript 评估服务器,具有 WebGPU 功能,可安全执行分布式代码 ● 制作了一个执行分布式工作的屏幕保护程序以及一个图形配置应用程序 ● 建立了一个瑞士手表 CI 构建/测试/发布流程,用于部署容器和图形安装程序在所有平台上进行 alpha/beta/release 渠道的手动/自动下载● 指导初级开发人员(审查设计、结对编程)添加实时调试等功能

自我监督的神经元分割,多代理增强学习
现有监督神经元分割方法的性能高度取决于准确注释的数量,尤其是应用于大型电子显微镜(EM)数据时。通过从未标记的数据中提取语义信息,自我监督的方法可以证明下游任务的性能,其中掩码映像模型(MIM)在其从掩盖的IMEM中恢复原始信息时已广泛使用了蒙版图像模型(MIM)。然而,由于EM图像中高度的结构局部性,并且存在相当大的噪声,因此许多素数很少有歧视性信息,从而使MIM预处理对神经元细分任务有效。为了克服这一挑战,我们提出了一个基于决策的MIM,该MIM利用强化学习(RL)自动搜索最佳的图像掩盖率和掩盖策略。由于巨大的勘探空间,使用单代机Agent RL进行体素预测是不切实际的。因此,我们将每个输入补丁视为具有共同策略的代理,允许多代理协作。此外,这种多代理模型可以在体素之间取决于依赖性,这对下游分割任务是有益的。表明,我们的方法对神经元分割任务的替代自我监督方法具有重要的影响。代码可在https://github.com/ydchen0806/dbmim上使用。

协作视觉文本表示为开放式摄取分段(补充材料)优化
- 可可固定:可可固定是一个大规模的语义分割数据集,其中包含164k图像,带有171个带注释的类,分为训练集(118k映像),验证集(5K图像)和测试集(41K图像)。在我们的实验中,我们使用完整的118K训练集作为训练数据来训练语义模型。- 可可式式:可可式跨跨培训图像与可可固定相同的训练图像。这些图像被标记为133个类别。在我们的经验中,我们使用可可式式跨跨景模型。- Pascal-voc:Pascal-Voc包括1,449张图像,用于20个宣传类。在开放式语义语义分割中,所有20个类均用于评估(称为PAS-20)。- ADE20K:ADE20K是一个大规模的场景,理解数据集构成了2K图像,用于验证两种注释:一种具有150个类的班级,带有Panoptic注释,另一个带有847个课程的语义注释。对于开放式语义语义分割,我们在ADE20K的两个设置上评估了我们的方法:150个类(称为A-150)和847类(称为A-847)。在开放式综合综合分割中,我们使用带有150个类注释的设置进行评估。
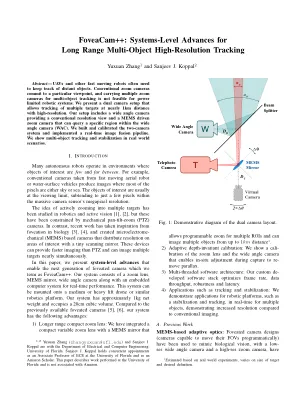
foveacam ++:远程多...
许多自主机器人在感兴趣的对象很少而彼此之间的环境中运行。例如,从快速移动的空中机器人或水面车辆中采用的常规摄像头会产生大多数像素是天空或海洋的图像。感兴趣的对象通常处于观看限制,从而在巨大的摄像头传感器的百万像素分辨率中仅缩写为几个像素。在机器人和主动视觉[1],[2]中研究了积极放大到多个目标的想法,但是这些摄像机已受到机械式倾斜Zoom(PTZ)摄像机的约束。相比之下,最近的工作从生物学[3],[4]的Foveation中汲取了灵感,并创建了基于微电体(MEMS)的相机,这些相机通过微型扫描镜来分布了感兴趣的区域的分辨率。这些设备可以提供比PTZ更快的成像,并且几乎可以同时映像多个目标。在本文中,我们提出了系统级进步,使下一代的foveated相机可以称为Foveacam ++。我们的系统由变焦镜头,MEMS镜像,广角摄像头以及嵌入式计算机系统进行实时性能组成。该系统可以安装到中型或重型升降机或类似机器人平台上。我们的系统大约有1公斤的净重,并占20厘米立方体的体积。与先前可用的foveated摄像机[5],[6]相比,我们的系统具有以下优点:
Dell PowerProtect 网络恢复解决方案指南
• 保险库分析 — Cyber Recovery 保险库为离线和受控环境中的分析提供了独特的优势;但是,Cyber Recovery 保险库不能替代良好的端点和网络安全工具。组织可以使用各种现有的 Dell Technologies 和 Index Engines CyberSense,在 Cyber Recovery 保险库中进行分析。Cyber Recovery 提供了一个工作流来触发 CyberSense 索引和分析过程。由于实时保护解决方案并非 100% 有效,因此 Cyber Recovery 保险库中受保护的数据可能已经受到攻击。将 CyberSense 分析添加到 Cyber Recovery 保险库可以发现损坏的文件,以便用最后一个已知的良好版本替换它们。CyberSense 与 Cyber Recovery 解决方案完全集成,以防范勒索软件。Dell Technologies 使用备份工作流,使用备份软件(例如 NetWorker、Avamar 和 PowerProtect Data Manager 应用程序)在隔离的保险库中复制和保护关键业务记录。当数据复制到 Cyber Recovery 保险库时,CyberSense 会扫描备份映像并生成分析,而无需 Cyber Recovery 保险库中的原始备份软件。分析人员会检查文件和数据库,以发现可能表明存在网络攻击的异常行为。此类行为包括文件损坏、数据库中文件或页面加密、删除和创建。

使用人工智能自然语言处理的 VR 读书应用程序提案
所提出的 VR 应用的特点是使用 AI 自然语言处理来阅读和理解书中的日语单词,并在 VR 眼镜中显示适当的图像。通过一款名为 Immersion VR Reader 的应用程序已经实现了在 VR 中阅读书籍的功能,该应用程序专为 Oculus GO (2) 提供。但是,这个应用程序存在一个问题。当我们开始开发本文提出的 VR 应用程序时,它仅支持英语。另一个原因是,还没有开发其他支持日语阅读理解的应用程序。作为回应,我们将注意力转向了 IBM 已经宣布的 Watson (3) 的使用。 Watson 的机器学习使用自然语言处理,具有理解文本的能力。在自然语言处理阶段,句子被分成几个单词,这个过程称为“分词”,然后每个单词被分配一个词性。此外,我们决定从中自动搜索名词,并将相应的搜索结果投影为VR。作为制作的第一步,我们将使用 Tone Analyzer 功能,这是 Watson 中可用的功能之一,可以提取阅读一段文本时感受到的情绪。此外,我们希望将获取到的情绪和对应的背景颜色投射到VR中。因此,本申请的特点是,利用Watson从文本中获得的情感数据,通过游戏引擎(Unity)获取,并构建相应的VR。这款应用程序的工作方式是,当你戴上 VR 眼镜时,空白处就会出现一个白色方块。然后,正在阅读的书的文本就会显示在空间的中心。接下来,系统自动搜索文本中的名词,并利用VR以360°视角投射与名词对应的图像和背景颜色。如果句子中除了名词之外还有您感兴趣的单词,您可以使用蓝牙遥控器手动选择它们。此外,用户还可以通过音调分析器阅读眼前书籍的全文,并根据自然语言处理的结果显示VR环境的背景颜色,从而通过声音表达场景的氛围。图像和颜色。这将实现。