机构名称:
¥ 1.0
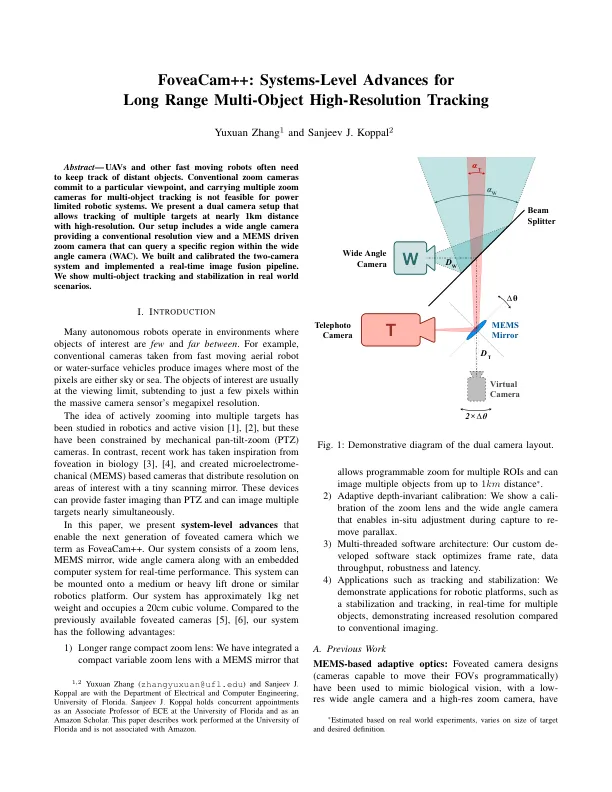
许多自主机器人在感兴趣的对象很少而彼此之间的环境中运行。例如,从快速移动的空中机器人或水面车辆中采用的常规摄像头会产生大多数像素是天空或海洋的图像。感兴趣的对象通常处于观看限制,从而在巨大的摄像头传感器的百万像素分辨率中仅缩写为几个像素。在机器人和主动视觉[1],[2]中研究了积极放大到多个目标的想法,但是这些摄像机已受到机械式倾斜Zoom(PTZ)摄像机的约束。相比之下,最近的工作从生物学[3],[4]的Foveation中汲取了灵感,并创建了基于微电体(MEMS)的相机,这些相机通过微型扫描镜来分布了感兴趣的区域的分辨率。这些设备可以提供比PTZ更快的成像,并且几乎可以同时映像多个目标。在本文中,我们提出了系统级进步,使下一代的foveated相机可以称为Foveacam ++。我们的系统由变焦镜头,MEMS镜像,广角摄像头以及嵌入式计算机系统进行实时性能组成。该系统可以安装到中型或重型升降机或类似机器人平台上。我们的系统大约有1公斤的净重,并占20厘米立方体的体积。与先前可用的foveated摄像机[5],[6]相比,我们的系统具有以下优点:
foveacam ++:远程多...
主要关键词


相关文件推荐