XiaoMi-AI文件搜索系统
World File Search System立方体

使用立方体和...
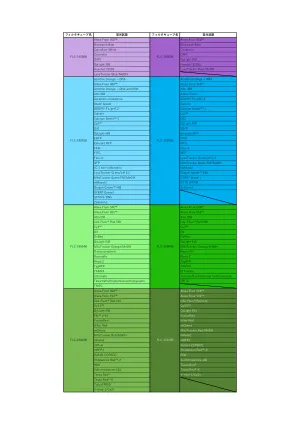
GLIDE(HPD) GTOSAT(HPD) LAICE(HPD) LLITED(HPD) PETITSAT(HPD) PUNC H(HPD) REAL(HPD) SOLAR CRUISER(HPD) TRACE RS(HPD) SPORT(HPD) SUNRI SE (HPD) IT C (HPD) ESCAP ADE (HPD) SWFO-L1 (JASD) JAN US (PSD)LUNAR开发器(PSD)ACS3(STMD)CISLUNAR Explorer(STMD)单击A(STMD)单击B / C(STMD)Capstone(STMD / HEOMD)COURIER SEP SEP DEMO(STMD)CU-E3(STMD)CU-E3(STMD)CU-E3(STMD)CU-E3(STMD)cu-e3(stmd)

立方体卫星
3.4。”InvenSense Inc.,2013 年 8 月 19 日。[12]“MPU6050。”Elementz Engineering Guild Pvt Ltd.,www.elementzonline.com/image/cache/catalog/data/products/Se nsors%20and%20Modules/Accelerometers/MPU6050/sku_154602_2-500x500.jpg。[13]“NEO 6M。” NEO-6M GPS 模块,创客门户,images.squarespace- cdn.com/content/v1/59b037304c0dbfb092fbe894/156113568290 6- WWEYOIG7JWB7N7W2NKEE/ke17ZwdGBToddI8pDm48kC JYY-h00dNzpJuBIa- 665MUqsxRUqqbr1mOJYKfIPR7LoDQ9mXPOjoJoqy81S2I8 N_N4V1vUb5AoIIIbLZhVYxCRW4BPu10St3TBAUQYVKcX CfBfm0f5Ee_9WQJsxv3IHUyKDPayImqZ- wIZeZ3phkwVjVAetzDTY9s_x8A- rhc/neo6m_main.JPG?format=2500w。[14]“在线图表软件和可视化解决方案。”Lucidchart,

太空立方体 美国国家航空航天局太空立方体
// 进动/章动 Vector3f resultPN = rotationPN * R; Vector3f resultECEF = rotationGAST * resultPN; float scale[3] = {-1.0, 1.0, 0.0}; detectorLoop: for (int i=0; i

走进分类立方体:亲密的……
机器学习 (ML) 算法在我们的环境中变得越来越普遍。它们嵌入在我们日常使用的产品和服务中,依赖于我们的个人信息,从中寻找模式并产生相应的结果 [1]。我们大多不知道这个过程,也不知道这些系统如何“看待”我们。然而,这些结果可能会严重影响我们的生活 [2–4]。最近的研究表明,一些 ML 算法反映了算法中编码的社会差异和偏见。此外,用于训练这些算法的数据集通常未能包括代表性不足的群体和历史上被边缘化的社区 [5–7]。因此,个人熟悉这些系统并了解如何检测和分类自己的身体至关重要。