XiaoMi-AI文件搜索系统
World File Search System木板
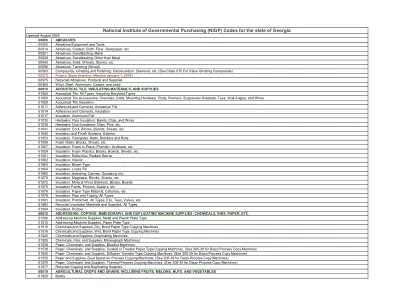
国家政府采购研究所(NIGP)...
00005磨料00505磨料设备和工具00514磨料,涂层:布,纤维,砂纸等。00521磨料,沙蛋白质,金属00528磨料,砂光剂,除金属00542磨料,固体:车轮,石头等。00556磨料,翻滚(车轮)00563化合物,研磨和抛光:卡木木,钻石等。(See Class 075 For Valve Grinding Compounds) 00570 Pumice Stone (Inactive, effective January 1, 2016) 00575 Recycled Abrasives, Products and Supplies 00584 Wool, Steel, Aluminum, Copper, and Lead 00010 ACOUSTICAL TILE, INSULATING MATERIALS, AND SUPPLIES 01005 Acoustical Tile, All Types, Including Recycled Types 01008声学瓷砖配件:频道,网格,安装硬件,杆,跑步者,悬架支架,T恤,壁角和电线01009声学瓷砖绝缘01011胶粘剂和水泥,胶水瓷砖,01014粘合剂和水泥粘合剂和水泥,隔热剂,隔离度01017隔离01017隔离,铝封面,氧化3001030。硬件,导管绝缘:夹子,销钉等。01041绝缘:软木,块,板,床单等。01045绝缘和饰面系统,外部01053绝缘,玻璃纤维:板,毯子和卷01056泡沫玻璃:块,床单等。01057绝缘,地面泡沫:酚类,尿电等。01059绝缘,泡沫塑料:块,木板,床单等。01061绝缘,反射性,辐射屏障01062绝缘,内部01063绝缘,吹式式式01064绝缘,松散填充01065绝缘夹克,帆布,Osnaburg等。01070绝缘,镁,块,床单等。01076绝缘,纸质材料,纤维素等。01072绝缘,矿物羊毛:毯子,块,木板01075绝缘涂料,底漆,密封剂等。01078绝缘,管道和管道,所有类型的01081绝缘,预制,所有类型,ELL,TEES,阀等。01083回收的绝缘材料和耗材,所有类型01084绝缘材料,橡胶00015地址,复制,模板和重复的机器供应:化学品,墨水,纸张等。01506 Addressing Machine Supplies, Metal and Plastic Plate Type 01510 Addressing Machine Supplies, Paper Plate Type 01515 Chemicals and Supplies, Dry, Bond Paper Type Copying Machines 01516 Chemicals and Supplies, Wet, Bond Paper Type Copying Machines 01520 Chemicals and Supplies, Duplicating Machines 01525 Chemicals, Inks, and Supplies, Mimeograph Machines) 01538 Paper, Chemicals,和用品,蓝线机01539纸张,化学药品和供应,涂层或处理过的纸型复制机(请参阅305-39,有关Diazo Protess和供应机,化学纸和用品,扩散转移类型复制机,请参阅305-39,请参阅305-39(请参阅305-39)。对于重氮工艺复制机)01570纸,化学和用品热工艺复制机,(有关重氮工艺复制机,请参见305-39)01577回收复制和复制用品00019农作物和谷物,包括水果,瓜子,坚果和蔬菜01920 Barley
SAM-2022-00960-DJL.pdf
CESAM RD-A 2023 年 2 月 24 日 公告编号:SAM-2022-00960-DJL 联合公告 美国陆军工程兵团和阿拉巴马州环境管理局 请求为 FORT MORGAN PARKWAY 步道延伸段排放湿地中的填料 致相关人员:本区已收到根据《清洁水法》第 404 条 (33 USC 1344) 申请陆军部 (DA) 许可的申请。请将此信息传达给相关方。申请人:阿拉巴马州自然资源保护部,州立公园分部 收件人:Greg Lein,主任 64 North Union Street Montgomery, Alabama 36130 代理人:Volkert, Inc. 收件人:Trent Farris 1680 West Second Street, Suite B Gulf Shores, Alabama 36542 位置/水域:Fort Morgan Road,阿拉巴马州自然资源部地役权,位于美国 180 号公路以北,阿拉巴马州鲍德温县格尔夫肖尔斯。有关位置详情,请参阅附件。 项目目的:该项目的基本目的是延伸 Fort Morgan 公园大道步道。总体项目目的是将现有的休闲步道延伸至 Fort Morgan 历史公园的入口,并修建卫生间和停车区。 拟议工作:申请人提议填埋约 1.09 英亩的沼泽非潮汐湿地,以延伸休闲步道。步道将由宽度为 10 至 12 英尺的铺装路面和宽度通常为 10 英尺的桩支撑木板路组成,并配有护栏,两者均设有解说标志。此外,该项目的中途还将建造一个卫生间和停车区。

gedore 封面 - E & G Tools Pte Ltd
带 7 个抽屉的工具手推车 T ABS 工作平台,带 3 个小零件隔间 T 带手柄,推、拉和旋转方便 T 抽屉可完全拉出、拆卸 T 单手安全锁定 T 滚珠轴承 T 抽屉可单独分区,交付时包括长度和横向分隔器 T 提供 2 个距离模块 1500 ED-70 K T 底部抽屉设计为重型抽屉 T 每个抽屉承重 40 千克 (88.18 磅),底部重型抽屉 60 千克 (132.27 磅) T 手柄侧的储物隔间带有 9 x 33 毫米穿孔板,用于固定配件 T 隔间门可通过中央锁锁定 T 四个可拆卸的小零件抽屉 T 中央锁用于挂锁 T 脚跟保护和全方位撞击保护 T GEDORE 重型底盘,带有高性能滚柱轴承轮,2 个固定脚轮 Ø 200 毫米和 2 个万向脚轮 Ø 125 毫米,其中一个带全制动器 T 总负载能力 500 公斤 (1,102.31 磅) T 尺寸:高 985 x 宽 775 x 深 435 毫米 T GEDORIT 蓝色,抽屉 GEDORIT 银色,顶部黑色 T 不含工具交付 T 可选配件:工具箱 2430,后面板 R 2003 L 或 RB 2004,木板 1500 HP
虚拟现实不仅欺骗了大脑:脊柱兴奋性在虚拟模拟的跌落
虚拟现实(VR)已知会引起大脑运动区域的大量激活。尚不清楚虚拟现实在多大程度上会触发感觉运动系统,更特别地,它是否会影响较低的神经水平。在这项研究中,我们旨在评估VR模拟具有挑战性和压力的姿势情况(Richie的木板经验)是否可以干扰15位健康的年轻参与者中姿势肌肉的脊柱兴奋性。三头肌肌肉的H-Re the ex在参与者站立并戴着VR头戴式耳机的同时,通过电神经刺激引起。参与者经历了几种情况,在此期间唤起了刺激:站立(Novr)站在地面上的VR(地面VR),站在建筑物的边缘(plankVr)(plankVr)(plankVr),并从建筑物(Fallowvr)掉下来。在整个实验过程中,测量了三头肌肌肉的肌电活性。腿部和头部运动也通过加速度计来测量以说明身体振荡。首先,在条件之间,头部旋转和肌电活性没有差异。第二,从novr到GroundVR和PlankVr不影响三头肌H-Re-Refex(H Max / m max)。最显着的发现是在跌落过程中H-Re-ex的急剧下降(Novr和FallingVR之间的47±26.9%,P = 0.015)。建议在VR中遇到姿势威胁有效地调节脊柱兴奋性,尽管保持了安静的站立姿势。这项研究表明,模拟掉落的模仿神经调整在实际的姿势挑战任务中观察到的神经调整。

2003年至2018年期间的国家森林收获和分配数据集
摘要。森林收获是人为活动之一,最显着影响森林的碳芽。然而,缺乏关于收获碳的明确空间信息在评估森林收获的影响以及森林碳预算方面构成了巨大的挑战。这项研究利用了有关木材收获,树覆盖损失(TCL)数据集和基于卫星的植被指数的省级统计数据来开发森林生物量(LEAF)数据集的长期收获和分配。的目的是提供30 m的空间分辨率提供森林收获的空间位置,并量化收获后的Car-Bon动力学。对133个城市和县的被调查森林收获的验证表明,叶数据集在捕获收获碳的空间变化方面表现良好,确定和调查的收获碳的确定碳的空间变化为0.83。线性回归斜率高达0.99。从2003年到2018年平均,森林收获去除了68.3±9.3吨C Yr -1,其中80%以上来自选择性记录。收获碳,19.6±4.0%,2.1±1.1%,35.5±12.6%6.2±0.3%,17.5±0.9%,19.1±9.8%进入了燃油厂,木材和纸板,木材基础和木板,木材面板,实心木制家具,结构性结构,结构性结构和残留池,以及相应的。燃油的直接燃烧是木材收获后碳排放的主要来源。然而,碳可以长期存储在木材中,到2100年,研究期间收获的碳的几乎40%仍将保留。该数据集有望为估计林业和碳预算提供基础和参考。可以在https://doi.org/10.6084/m9。figshare.23641164.v2上下载30 m×30 m的收获碳数据集(Wang等,2023)。
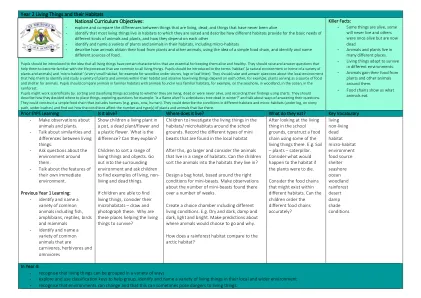
2年级生物及其栖息地
民族课程目标: - 探索和比较生物,死亡和从未活着的事物之间的差异 - 确定大多数生物生活在它们适合的栖息地中,并描述不同的栖息地如何提供不同种类的动物和植物的基本需求,以及如何依赖彼此的动物,并在包括植物和动物中依赖各种动物,包括植物和动物,包括植物和动物,包括植物和动物,包括植物和动物,包括习惯性的动物 - 简单的食物链,并识别和命名不同的食物来源。学生应介绍这样的想法,即所有生物都有某些特征,这些特征对于保持他们的生命和健康至关重要。他们应该提出并回答问题,以帮助他们熟悉所有生物共有的生活过程。学生应介绍“栖息地”(一种自然环境或各种动物的自然环境或家乡)和“微生物”术语(例如,在石头,原木或叶子上的木板)。他们应该提出并回答有关当地环境的问题,以帮助他们识别和研究栖息地中的各种动植物,并观察生物如何相互依赖,例如,植物是动物食物和庇护所的来源。学生应将熟悉栖息地中的动物与在不熟悉的栖息地中发现的动物进行比较,例如,在海边,林地,海洋,雨林中的动物。他们应该描述如何决定放置东西,例如探索问题:‘火焰还活着吗?学生可能会通过以下方式进行科学工作:根据自己的生活,死亡还是从未活着,并使用图表记录他们的发现。一棵落叶树在冬天死了吗?并谈论回答他们的问题的方法。他们可以构建一个包括人类在内的简单食物链(例如草,牛,人)。他们可以描述不同栖息地和微型企业的条件(在日志下,在石质路径上,在灌木丛下),并找出条件如何影响居住在那里的动植物的数量和类型。
肠研究英国的微生物组花园探索了迷人的链接
植物群。由古老的文化所告知,这些文化倾向于并收获当地的景观,SID和Chris设计了一个美丽而多样的花园,利用可食用的植物以及肠道和土壤微生物组合,都协同工作,以改善我们的整体身心健康。开创性的可食用草甸种植计划从野生草地上汲取灵感,其中包括诸如Deschampsia cespitosa,sesleria autumnalis,briza Media和Hordeum jubatum等装饰性草,结合了多年生植物,可为人们和野生动物提供收获。开创性的“可食用草地”结合了许多特征植物,包括Persicaria Bistorta,Camassia Quamash和Lupinus Luteus,以创建丰富的黄色,蓝色和粉红色的挂毯。这三种美丽的植物通常在英国的花园中种植,但是很少有人知道它们也是很棒的粮食作物,他们可以提供无数的肠道健康和微生物组的好处。有关完整的工厂清单,单击此处手工制作的雕塑特征英国微生物组花园采用橡木雕塑墙,该墙壁已由SID,Chris和Atlantes Landscapes的团队手工雕刻和灼热,为人肠提供了醒目的物理图形。墙壁穿过花园的后部蜿蜒曲折,并围绕着六角形木材庇护所“蜂巢”,由道格拉斯·菲尔(Douglas Fir)和雪松(Cedar)团队制造,提供一个空间,人们可以在这里聚集以准备食物或从元素中避难。由德文郡种植和磨碎的橡木制成的木板路,穿过草地,三个蜂群蜂巢从伍德兰 - 边缘出现。设计二人组传统上是用生物动力牛粪制作的,为蜜蜂创造了栖息地,吸引了草地上丰富的花卉展示,提供了一种蜂蜜来源,该蜂蜜被认为是肠道微生物组的天然预生物。

构造照明系统模型
摘要这项研究的重点是在贝宁市联邦教育学院Ekiadolor的教育目的建造汽车照明系统模型。这项研究涉及对汽车技术教育中实用教学辅助的关键需求,特别是针对对车辆照明系统的理解。该研究旨在设计和构建功能照明系统模型,该模型模拟汽车照明系统的关键操作,包括大灯,尾灯,转弯信号和制动灯。使用12伏电源系统,该模型包含了各种组件,包括电压调节器,控制机制,例如主照明开关,调光开关,闪光灯单元和紧急危害开关,以及多个照明单元。施工过程涉及在木板上系统地组装组件,全面的布线和彻底的测试程序。结果表明,构造的模型达到了26.4瓦的总功率输出,照明点在10,500伏特下运行,并受到3A保险丝系统的保护。该模型成功地证明了电能转换为光能,从而为学生提供了了解汽车照明系统的动手经验。研究得出结论,该模型是教授汽车照明系统的有效教育工具,并建议将其纳入技术和工程培训计划。在尼日利亚,在包括技术学院,教育学院(技术),理工学院和大学在内的各个机构提供了此培训。关键字:汽车教育,照明系统,技术教育,实用培训简介汽车技术教育是一项全面的计划,致力于为学生提供基本技能和知识的汽车行业。课程包括从设计和诊断到维修,维护和服务操作的各种汽车方面(Denton,2020年)。学生接受故障排除和解决各种车辆问题的培训,尤其是关注电气组件和照明等关键系统。该计划旨在为学生做好现代汽车挑战的准备,包括
眼控制鼠标光标
瑜伽近年来已成为世界各地许多人生活的常规部分。这对必要的瑜伽姿势进行了科学研究。瑜伽姿势估计是一种计算机视觉技术,可以预测人体的位置或姿势。姿势检测算法已被证明可用于姿势识别和提高瑜伽姿势的准确性。在当今的现代时代,ML和DL技术已被证明对于对象发现任务很重要。我们可以有效地使用该模型来识别不同重要的身体部位并实时估算用户姿势。为实现这一目标,我们用不同的瑜伽姿势图像训练模型。当图像被送入姿势估计模型时,它通过执行特征提取来分析图像并识别身体部位,表明其在屏幕上的位置。此外,该模型为每个检测提供了一个置信值,表明给定图像正确识别为输入的可能性。我们使用了不同的瑜伽姿势,例如骆驼姿势,下dog姿势,女神姿势,木板姿势,树姿势,Warrior2姿势来训练该模型,这使其在识别各种姿势方面非常准确。这项研究的主要目标是使用此检测技术来帮助人们确定他们正在执行的瑜伽姿势。此外,我们还解决了当前系统的缺点,例如它们的准确性差,高处理成本以及对各种身体形状和瑜伽样式的适用性限制。在本文中,我们提出了一种基于卷积神经网络(CNN)的方法来创建瑜伽立场检测系统。建议的技术旨在通过提供更精确,有效和广泛适用的解决方案来识别瑜伽姿势和产生反馈的方法,以改善当前系统的缺点。总体而言,基于技术的工具在我们的研究中的应用可能有助于设计更多定制和成功的瑜伽实践。我们的发现可以帮助构建虚拟助手和智能瑜伽垫等应用程序,从而改善瑜伽实践的可访问性和个性化。

计划委员会05/11/2024
1。申请站点1.1申请站点由一个两层楼的农舍组成,称为Hollin Hey Farm。该物业是二级上市建筑物。沿着一条未经装修的通道沿线的Garswood Old Road进入该站点,该轨道在利物浦前往Wigan Railway Line。该地点设置在农村地区,周围的土地主要用于农业用途。有两个附近的住宅物业,该地点西北方向,称为Hollin Hey View和Hollin Hey House。直接位于住宅网站的北部,是一组与申请站点相同所有权的前农业建筑,该建筑物最后一次用于运输业务。1.2农舍具有历史性优点,可以在1888年的军械调查(OS)地图上看到。建筑物的原始形式和特征清晰可见,建筑物对当地的特征做出了良好的贡献。农舍上有一个“ TG 1680”上的铭文,并在1875年重建一楼。农舍仍然保留原始功能,例如在窗户开口的双重倒角座。应用地点位于绿带内。1.3该物业以前已以独立的双车库扩展到住宅的西部海拔(参考文献0694/018,在1994年获得了计划许可)。住宅在住宅西南的大型花园区域,其中包括一个池塘和草地。2。提案2.1避暑别墅的架设(部分回顾)。提议遵守规划申请的建筑物位于池塘的南部,与铁路线相邻,毗邻该地点的南部边界。2.2避暑别墅将用轻巧的木材框架竖立,宽度为7.55米,长度为7.85米。屋檐高度将为2.65米,总山脊高度为4.45米。该建筑物旨在由主要住宅的居民使用偶然使用。建筑物的地板面积为59平方米。该建筑物将位于池塘南部的住宅花园中。外部饰面将是墙壁的木板面板,带有UPVC窗户的屋顶的黑色瓷砖。