XiaoMi-AI文件搜索系统
World File Search System机械臂
您对机器人感兴趣吗?
此外,正如丰田研究院机器人技术总监吉尔·普拉特博士所描述的那样,大硅谷和旧金山湾区正处于这场“机器人寒武纪大爆发”的中心。事实上,最早的两个机器人就是在这里开发的。1969 年,斯坦福大学的维克·谢因曼设计了第一台可由计算机控制的电动机械臂。在成功试运行并引起通用汽车公司的兴趣后,Unimation 采纳了这一概念,并发布了 PUMA(可编程通用装配机)。Unimation 最终被史陶比尔收购,PUMA 成为有史以来最成功的工业机器人之一。Shakey 是第一个能够感知和推理的移动机器人。1972 年,《时代》杂志还将其称为世界上第一个电子人。Shakey 由 SRI International 于 1966 年至 1972 年间开发,开创了计算机视觉、路径规划和控制系统的诸多进步,这些进步至今仍在使用。这些公司一直是硅谷机器人、区域机器人生态系统/协会的核心,但我们也看到
2023年亚太地区安全评估
封面图片:(上图左)2023 年 2 月 13 日,印度班加罗尔,印度空军 Mi-17 直升机在 Aero India 2023 航空展开幕式上悬挂 G20 旗帜(Prakash Singh/Bloomberg via Getty Images);(上图中)港珠澳大桥(LIU KAIYOU/Getty Images);(上图右)用于半导体制造的硅晶圆的 3D 渲染机械臂(Phonlamai Photo/iStock/Getty Images);(下图左)2022 年 5 月 24 日,澳大利亚总理安东尼·阿尔巴尼斯、美国总统乔·拜登、印度总理纳伦德拉·莫迪和日本首相岸田文雄在东京会面(SAUL LOEB/AFP via Getty Images);(下图右)2022 年 11 月 6 日,国际舰队检阅在日本附近海域举行(Kyodo News via Getty Images)。

引用:Hahm, Katie S. 和 H. Harry Asada。“设计一种具有新型可伸缩臂的故障安全可穿戴机器人,以便在地面工作期间符合人体工程学。” IEEE 智能机器人与系统国际会议,2019 年 11 月,中国澳门,电气电子工程师学会,2020 年 1 月。© 2019 IEEE
摘要 — 飞机制造、建筑和农业生产通常需要工人长时间保持不舒服的姿势,例如弯腰和跪下。我们介绍了一款名为 MantisBot Alpha 的可穿戴机器人,它由两个可扩展的机械臂组成,可以将工人支撑在靠近地面的位置,允许他们执行双手任务,并协助他们站立和跪下。这种新设计的关键部件是一种新颖的连杆机构,可以调整工人与地面的距离和躯干倾斜度。机构连杆参数经过优化,以便 a) 其扩展率足够高,为 1:2.43,可以将人体从地面推开并在不使用时完全收缩剪刀臂,以及 b) 它允许工人在较大的空间内伸展,同时 c) 它足够轻,便于穿戴。连杆机构还避免了标准剪刀机构中的奇异性问题。执行器设计提供了一个故障安全系统。已经制作了一个原型来证明该系统的可行性。关键词:人体增强、机器人额外肢体、外骨骼、机制设计、工业机器人

用于机器人操作的虚拟水下浮动操作系统
本文提出了一种基于并联和串联机器人平台的虚拟水下浮动操作系统 (VSFOS)。其开发的主要目的在于以更简单、更安全的方式进行模拟水下操作实验。该 VSFOS 由一个六自由度 (6-DOF) 并联平台、一个 ABB 串联机械手、一个惯性传感器和一个实时工业计算机组成。6-DOF 平台用于模拟水下航行器的运动,其姿态由惯性传感器测量。由实时工业计算机控制的 ABB 机械手作为操作工具执行水下操作任务。在控制系统架构中,开发了软件来接收惯性传感器收集的数据、进行通信和发送指令。此外,该软件还显示机械手的实时状态。为了验证所提出的系统,进行了两项实验来测试其性能。第一个实验主要测试VSFOS的通信功能,第二个实验主要测试机械臂跟随并联平台运动,在空间中执行模拟操作任务,两个实验的结果证明了VSFOS的有效性和性能。
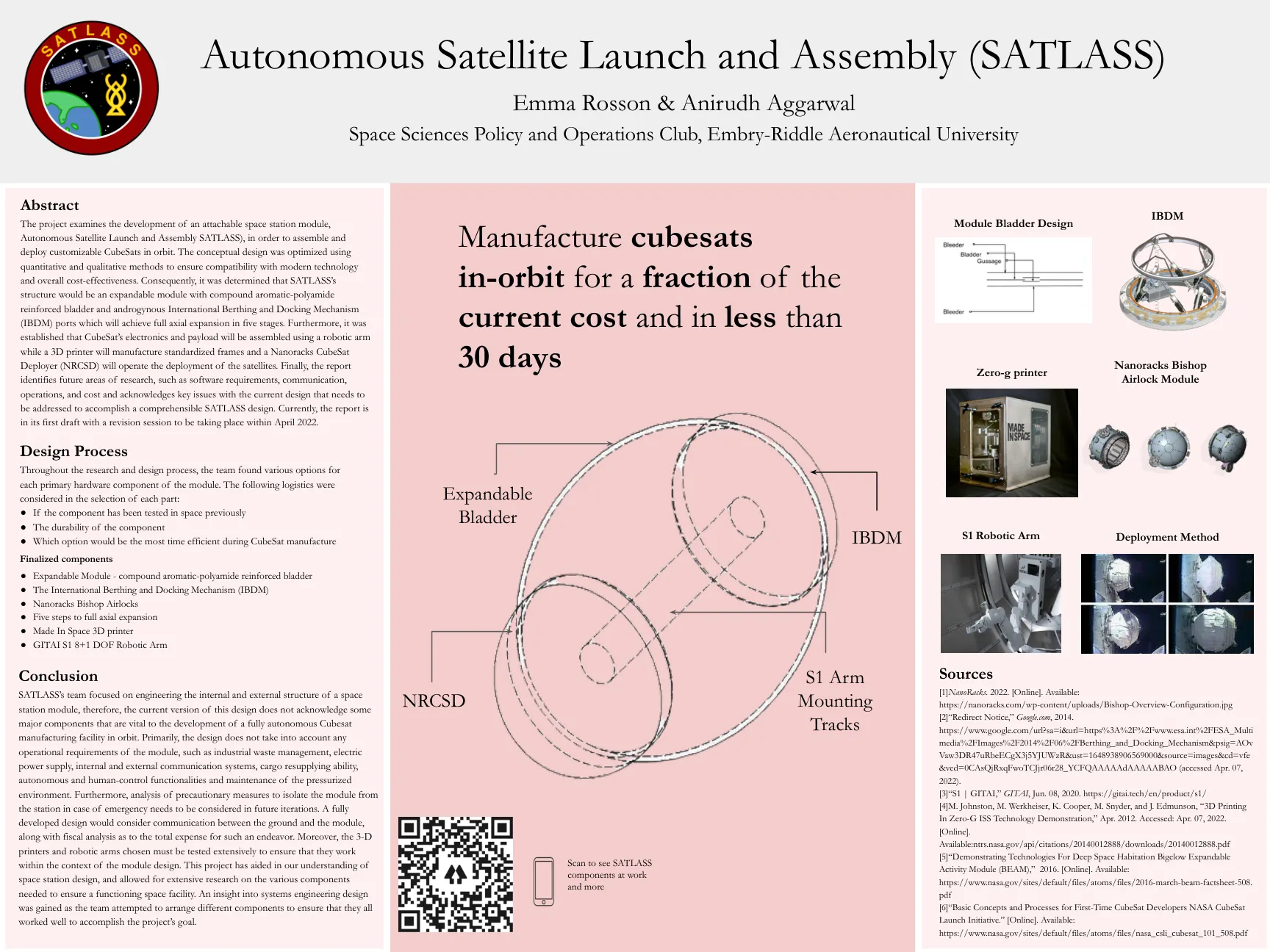
自主卫星发射和组装 (SATLASS)
该项目研究了可连接空间站模块(自主卫星发射和组装 SATLASS)的开发,以便在轨道上组装和部署可定制的立方体卫星。概念设计使用定量和定性方法进行了优化,以确保与现代技术的兼容性和总体成本效益。因此,确定 SATLASS 的结构将是一个可扩展模块,具有复合芳香族聚酰胺增强囊和雌雄同体的国际停泊和对接机制 (IBDM) 端口,将分五个阶段实现完全轴向扩展。此外,确定立方体卫星的电子设备和有效载荷将使用机械臂组装,而 3D 打印机将制造标准化框架,Nanoracks 立方体卫星部署器 (NRCSD) 将操作卫星的部署。最后,报告确定了未来的研究领域,例如软件要求、通信、操作和成本,并承认当前设计中需要解决的关键问题,以实现可理解的 SATLASS 设计。目前,该报告尚处于初稿,修订会议将于2022年4月举行。

新闻发布 - 新加坡 IMAGINE AI:全球规模最大的人工智能创新峰会,旨在塑造医疗保健的未来
2. IMAGINE AI 开幕日活动推出了护士陪伴机器人 NUHS MiSSi Robot。这是一款基于云的机器人,通过专用 5G 网络连接到安全的医疗云,以实现一系列 AI 功能。例如,它基于云端训练过的 GPT 模型,具有共情个性。MiSSi 机器人旨在通过接管重复性任务来支持医护人员。它可以自主协助护士完成生命体征监测、避免病房跌倒、最后一英里交付和患者互动等任务,从而提高病房活动的效率。它具有可更换的“智能”隔间和机械臂,可在医疗环境中的消耗品物流和交付中扮演多种角色。MiSSi 还能够与患者交谈,以同理心和幽默感为患者提供个性化护理。新加坡国立大学医疗中心学术信息办公室主任、兼职教授 Ngiam Kee Yuan 补充道:“我们正处于 MiSSi 机器人原型的最后阶段,并在新加坡国立大学医疗中心病房进行试点,并计划将其扩展到更多环境。”
BRAINGATE 技术:辅助...
摘要:创新的神经假体技术 Brain Gate 旨在让瘫痪或其他运动障碍患者能够用自己的思想操作设备。该技术通过利用一个微型植入式传感器记录大脑中的神经活动并将其转换为电信号,可用于控制外部设备,如计算机、机械臂甚至通讯设备。瘫痪和其他运动障碍患者希望这项技术能够帮助他们重新掌控自己的生活,该技术已在动物模型上成功测试,并在人体临床试验中显示出良好的效果。借助 Brain Gate 技术,辅助技术领域可能会发生一场革命,让有障碍的人能够以以前无法想象的方式与外界互动。麻省总医院和布朗大学的一组科学家发明了 Brain Gate 技术。该系统由一个微型传感器组成,该传感器被插入大脑中调节运动的部分,即运动皮层。该传感器能够识别大脑运动神经元产生的电脉冲,并将这些信号转换为可用于操作外部设备的指令。

Aero-plane:一款在虚拟 2D 平面上呈现重量运动错觉的手持式力反馈设备
摘要 力反馈被认为是虚拟现实 (VR) 的下一个前沿。最近,随着消费者对无线 VR 的推动,研究人员放弃了基于笨重硬件(如外骨骼和机械臂)的解决方案,开始探索更小的便携式或可穿戴设备。然而,在渲染惯性力时,例如移动重物或与具有独特质量特性的物体交互时,当前不接地的力反馈设备无法提供快速的重量转移感觉,无法真实模拟 2D 表面上的重量变化。在本文中,我们介绍了 Aero-plane,一种基于两个微型喷气螺旋桨的力反馈手持控制器,可以在 0.3 秒内渲染高达 14 N 的重量转移。通过两项用户研究,我们:(1)描述用户在使用我们的设备时感知和正确识别虚拟平面上不同运动路径的能力; (2)测试了控制器在两个 VR 应用程序(飞机上的滚动球和使用不同形状和大小的厨房工具)中使用时的真实度和沉浸感。最后,我们展示了一组应用程序,进一步探索我们设备的不同使用情况和替代外形尺寸。

工业机器人钻井过程的数字孪生框架的开发
航空航天部件(包括发动机部件或机体结构)的严格要求需要可靠的制造工艺。因此,对设备性能、产品开发和制造的持续监测、控制和优化至关重要。机械加工是航空航天部件制造中的重要制造工艺,包含不同的物理现象,如断裂、变形、散热、摩擦学和振动[1]。在机械加工工艺中,钻孔主要用于飞机结构(如机身、机翼等)的最终生产阶段,使用机械臂进行精确且经济高效的钻孔作业[2]。随着制造业通过数字化转型迅速发展,数字孪生是一项新技术,它有潜力提高机械加工效率并减少与机器人钻孔相关的缺陷。数字孪生是工业 4.0 中的一个概念,它通过从物理世界收集的数据流提供制造元素的数字化表示。这些数据用于更新数字实体,控制命令被发送回制造元素进行操作。因此,物理和数字孪生之间可以进行无缝、连续的信息交换,从而可以预测和优化制造过程 [ 3 ]。在制造环境中,数字孪生的实现方式多种多样,具体取决于所需的对象

3D-BCI训练环境下利用卷积神经网络解码直观视觉运动意象
摘要 — 在本研究中,我们采用了视觉运动意象,这是一种更直观的脑机接口 (BCI) 范式,用于解码直观的用户意图。我们开发了一个三维 BCI 训练平台,并将其应用于帮助用户在视觉运动意象实验中进行更直观的想象。实验任务是根据我们日常生活中常用的动作来选择的,例如拿起电话、开门、吃饭和倒水。九名受试者参加了我们的实验。我们提供了统计证据,表明视觉运动意象与前额叶和枕叶具有高度相关性。此外,我们使用功能连接方法选择了最合适的脑电图通道进行视觉运动意象解码,并提出了一种卷积神经网络架构进行分类。结果,所提出的架构对 16 个通道中 4 个类别的平均分类性能在所有受试者中为 67.50 (±1.52)%。这一结果令人鼓舞,它展示了开发基于 BCI 的设备控制系统用于神经假体和机械臂等实际应用的可能性。