XiaoMi-AI文件搜索系统
World File Search System杂乱

人工智能在基因组学中的作用-IJRPR
在生物科学和医学领域中,基因组学是一个致力于探索基因组的开创性领域,它涵盖了有机体内的全部DNA收集[1]。研究人员从根本上改变了研究人员的方式,改变了基因,进化模式,杂乱的疾病,以及他们在健康的疾病以及他们的影响上以及他们的影响以及他们的影响以及他们的影响以及他们的影响以及他们的影响以及他们的影响以及他们的影响以及他们的影响。基因组研究需要收集广泛的DNA序列数据。下一代测序技术的出现极大地改变了基因组数据获取的景观,使得以大大降低的成本迅速生成大量的测序信息成为可能。最初,基因组研究的重点主要是测序DNA的行为[1]。然而,随着对基因组数据的测序需求不断升级,很明显,建立生物信息学算法,方法论和软件工具对于存储,管理和分析这些丰富的信息所必需的必不可少的信息[2]。分析基因组数据在转化研究中至关重要,它弥合了基于实验室的生物学发现及其在临床环境中的实际应用之间的差距[3]。在一个越来越多地受技术影响的世界中,人工智能(AI)脱颖而出,是一个与人类思维过程相似的领域。这项创新技术在推进基因组研究方面是无价的,开辟了新的探索和理解途径[4]。作为AI,各个部门都取得了长足的进步 - 从高等教育到工业,它的影响是无误的。在学术研究领域,最新的大语言模型(LLM)和其他AI技术不仅重塑了科学家进行研究的方式,而且还可以与更广泛的社区分享他们的发现[5]。可访问的基因组数据存储库的激增为AI创造了肥沃的基础,使研究人员能够从复杂的基因组数据集中提取有意义的见解。在其核心上,AI包括机器学习(ML)技术和计算算法,这些技术和计算算法分析了现有数据,辨别基本模式,并将这些知识应用于预测新数据集的结果[6]。在基因组学中,DNA序列数据被定量测量和以数字格式测量和编码,使其适用于AI应用。AI已经在基因组学方面取得了重大进步,包括但不限于基因组发现,基因组组合,基因组注释,基因组序列比对,表征基因组变异以及预测植物和人类基因组突变的影响。
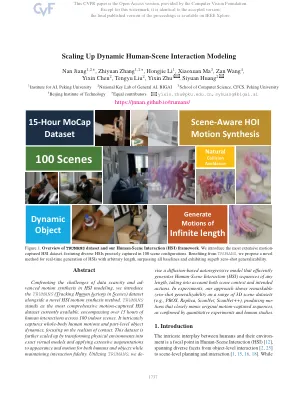
扩展动态的人类场景相互作用建模
已经取得了显着的迈进,该领域显然是由于缺乏高质量数据集而导致的。早期数据集(如Pigraphs [39]和Prox [16])启动了探索,但受到可扩展性和数据质量的约束。MOCAP数据集[14,30]使用Vicon等复杂的设备优先考虑高质量的人类运动限制。但是,他们通常缺乏捕获多样化和沉浸式的HSI。通过RGBD视频录制的可扩展数据集提供了更广泛的实用程序,但受到人类姿势和对象跟踪质量较低的阻碍。合成数据集的出现[1,3,4,55]提供了成本效率和适应性,但无法封装完整的现实HSI频谱,尤其是在捕获动态3D触点和对象跟踪时。为了应对这些挑战,这项工作首先引入了trumans(t rack hum a um a u u u u u u u u u u u u u u a ctio n s in s cenes)数据集。Trumans成为最广泛的运动捕获HSI数据集,涵盖了15个小时以上15个小时的室内场景中的各种相互作用。它捕获了全身的人类动作和部分级别的对象动力学,重点是接触的现实主义。通过将物理环境复制到准确的虚拟模型中,可以进一步增强此数据集。外观和运动的广泛增强都应用于人类和物体,以确保相互作用的高度有限。接下来,我们设计了一个计算模型,通过将场景和动作作为条件同时采取行动来应对上述挑战。我们对杜鲁士数据集和运动合成方法进行了全面的交叉评估。特别是,我们的模型采用自回归的条件扩散,场景和动作嵌入作为征用输入,能够产生任意长度的运动。为了整合场景上下文,我们通过在本地化的基础上查询全局场景的占用来开发有效的场景感知者,这在导航杂乱的场景时表现出了3D感知的碰撞避免的强大效率。为了将框架的动作标签合并为条件,我们将时间特征集成到动作片段中,使模型在粘附在给定的动作标签时随时接受指令。场景和动作条件的这种双重整合增强了我们方法的可控性,为在3D场景中合成合理的长期运动提供了细微的界面。将trumans与现有人物进行比较,我们证明了杜鲁士人明显提高了最先进的方法的性能。此外,我们的方法在定性和定量上进行了评估,超过了现有的运动综合方法,其质量和零击性能力在看不见的3D场景上,非常接近原始运动捕获数据的质量。除了运动合成之外,杜鲁士人已经针对人类的姿势和接触估计任务进行了基准测试,证明了其多功能性并将其确立为一系列未来的研究努力的宝贵资产。

研究声明
•具有以对象为中心的空间关注的表示形式:我们开发了新的视觉语言代表2; 3; 3允许轻松推断和向机器人提供有关其进度(“值函数”)向图像或语言目标的反馈,例如“将碗放在盘式架上”。使用离线增强学习4在人类视频上进行培训,允许在诸如厨房之类的真实环境中转移到机器人操作中。并联,我们已经建立了一个预先培训的对象无监督的代表,这些家族在许多粒度上捕获场景,允许下游演员动态组装与任务相关的最小表现,以使学习者能够更好地参加与任务相关的clutter and niffers tribles trimpers trimpers trains nibers trains trains nibers trains nraber nibers niber sribly nraiss nraby n traise n d – 9:e.g.,我们,我们可以启动。分类时间是执行复杂的任务,例如涉及分步食谱的“煮茄子”。•暂时关注决策和学习:代表的下游,决策可以受益于在任务学习和执行过程中对关键瞬间的选择性关注。在预测和计划中趋向于未来的关键事件10; 11和空间区域12减轻复合错误,改善图像目标达到任务绩效,并更好地转移给新机器人。对于实时动态任务,例如在杂乱的设置中移动对象抓住对象,我们已经成功训练了元控制器,这些元控制器动态确定计划执行13之前要做的“计划”(地平线和计算时间)要做。一个机器人可以通过首先学习如何检查是否紧绷来学习如何拧紧螺钉。适用于过去的经验,时间关注改善动态模型和政策学习4; 14-16:例如,当培训专注于机器人在其不久的将来最有可能经历的经验类型时,在增强学习中学习的动态模型会更好地工作。15。•细心的传感和探索:传感也带来了权衡:传感器调解可用机器人的所有环境信息,但需要资源成本。我们已经训练了机器人,从战略上通过主动传感和探索来感知任务相关信息17-22:我们已经展示了机器人如何通过这种互动23来自我评估他们的任务进展,以通过加强学习来改善自己(最佳纸张奖,CORL 2022);例如一旦培训了政策,就不再需要支票政策及其额外费用。通过掌握的这种效率提高了效率,也可以通过其他方式实现:我们已经证明,在训练时,机器人可以通过巧妙利用访问“特权”传感器的访问来学习从更少的感觉输入24中进行操作。我们现在正在研究机器人学习者的感官需求的基础:例如,我们已经表明,在部分可观察性下基于模型的控制的基本限制也预测了学识渊博的机器人策略的难度和样本复杂性25。