XiaoMi-AI文件搜索系统
World File Search System步行者

共同施瓦兹柴尔德宇宙黑洞
我们在不同的坐标系中彻底研究了共同研究的Schwarzschild空间,以寻求宇宙黑洞的物理合理模型。我们假设一个符号因子仅取决于时间坐标,并且时空在渐近上是弗里德曼·莱玛·罗马·罗伯逊 - 罗伯逊 - 罗伯逊 - 步行者宇宙的宇宙,由完美的流体遵循的线性方程式p =wρ,w> - 1/3。< / div> < / div。在这类的空间中,根据各向同性坐标构建的McClure-Dyer时空,根据标准的Schwarzschild坐标构建的Thakurta时空是相同的,并且没有描述宇宙黑洞。相比之下,分别根据Kerr-Schild和Painlev´e-Gullstrand坐标构建的Sultana-Dyer和Culetu类别的空间类别,描述了宇宙学黑洞。在苏尔塔那迪尔案例中,相应的物质场范围可以解释为均匀的完美流体和不均匀的无效无效的组合,这与Sultana和Dyer的解释不同。在Culetu情况下,该物质领域可以解释为均匀的完美液体和不基因的各向异性流体的组合。在两种情况下,总能量量张量违反了所有标准能量条件,以径向坐标的有限值在后期。因此,-1 / 3
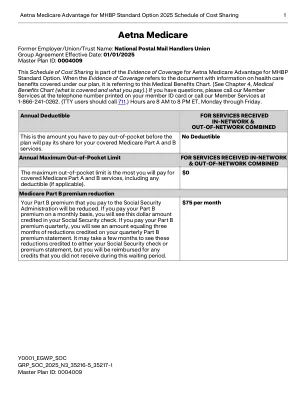
Aetna Medicare -MHBP.com
糖尿病自我管理培训,糖尿病服务和用品(续)授权。我们的计划建议在由外部工作提供商提供时对服务进行预授权。耐用的医疗设备(DME)和相关用品涵盖的物品包括但不限于:轮椅,拐杖,动力床垫系统,糖尿病供应,糖尿病供应,由提供商订购的医院床,用于家庭中,IV输液泵,IV液压,言语产生设备,氧气设备,氧气设备,肾上飞机和步行者。连续的葡萄糖监测器(CGM)和供应可以通过参与的DME提供商获得。有关DME提供商列表,请访问www.aetna.com/dsepubliccontent/assets/pdf/en/dme_nation al_provider_listing.pdf。dexcom和自由泳是参与药房的连续葡萄糖监测器和供应。您的提供商必须获得连续葡萄糖监测仪的授权。传感器。我们涵盖了原始Medicare涵盖的所有医学上必要的DME。如果您所在地区的供应商不带特定的品牌或制造商,则可以询问他们是否可以为您特别订单。最新的参与药房和供应商列表可在我们的网站上找到:mhbp.com/retiree。事先授权规则可以申请网络服务。您的网络提供商负责要求事先授权。我们的计划建议在由外部工作提供商提供时对服务进行预授权。
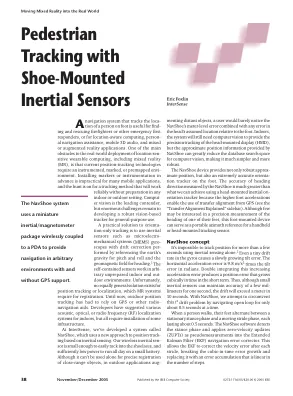
使用鞋装惯性传感器进行行人跟踪
跟踪步行者位置的导航系统可用于寻找和营救消防员或其他紧急救援人员,或用于位置感知计算、个人导航辅助、移动 3D 音频以及混合或增强现实应用。在现实世界中部署位置敏感型可穿戴计算(包括混合现实 (MR))的主要障碍之一是,当前的位置跟踪技术需要仪器化、标记或预先映射的环境。对于许多移动应用来说,提前安装标记或仪器是不切实际的,人们正在寻找一种无需准备即可在任何室内或室外环境中可靠工作的跟踪方法。计算机视觉是领先的竞争者,但开发用于通用的强大视觉跟踪器仍然存在巨大挑战。仅用于方向跟踪的实用解决方案是使用惯性传感器,例如微机电系统 (MEMS) 陀螺仪,通过参考地球重力进行俯仰和滚动,参考地磁场进行航向校正。1 独立式传感器可在任意未准备的室内和室外环境中工作。不幸的是,对于位置跟踪或定位,没有同样通用的解决方案,而 MR 系统需要这些解决方案才能进行注册。到目前为止,室外位置跟踪不得不依赖 GPS 或其他无线电导航辅助设备。开发人员已经提出了各种声学

分析零工经济工作者面临的挑战、影响和动机
马来西亚沙巴 电子邮件:noorziah@uitm.edu.my、fitriani.shukry@gmail.com、vel.claudius@gmail.com 摘要 这项定性研究探讨了零工经济的挑战、影响和动机。了解关键问题可以改善人力资源管理,并改善工人的健康和福祉。 我们采用定性方法来探索沙巴哥打京那巴鲁零工工人的主要工作。这项研究包括全职和兼职的步行者和骑自行车的人。我们使用半结构化访谈来确定零工送餐骑手的挑战和影响。 主要挑战是收入不稳定,这可能会对他们的财务状况产生负面影响。 送餐后,佣金就会支付。这种情况没有工作保障,因为公司不雇用他们。他们没有福利或保障,例如健康保险或带薪休假。由于这项工作对体力的要求很高,他们还需要长时间工作并感到疲劳。客户需求和值班骑手的数量可能会影响每天的工作分配。根据客户需求和骑手的空闲时间,工作分配会有所不同。为了满足客户需求,骑手可能需要长时间工作或加班。由于缺乏工作保障和福利,骑手及其家人可能会面临财务不稳定。关键词:挑战、动机、影响、食品行业、零工福利、人力资源管理、可持续发展目标。简介

划出自动驾驶汽车的可伸缩性问题 -
Troel-Madec等。[85]横向LED显示器 - 多AVS虚拟现实(VR)Rossi -Alvarez等。[73] LED轻带车辆 - 多AVS测试轨道Hesenius等。[41]可穿戴的AR行人-Multi AVS Image Tran等。[84]可穿戴的AR行人-Multi AVS VR Colley等。[19]听觉消息车辆-Multi AVS VRHolländer等。[46]投影,智能遏制车辆,基础设施对面多AVS VR Dietrich等。[28]投影,对面的信号轻型车辆-VR Colley等。[16]挡风玻璃车辆对面的文本-VR Wilbrink等。[90] LED轻带车辆相同,对面 - 视频Holländer等。[47]智能手机行人相同的侧面多AVS视频Hoggenmüller等人。[43] LED轻带车辆相同侧-VR Dey等。[27]上下文接口车辆相同侧-VR Colley等。[15] LED轻带车辆组-VR Joisten等。[50]步行者,笑脸车辆组-VR Chen等。[14] LED轻型车辆集团混合交通公共道路Mahadevan等。[61]混合(LED灯,物理手,触觉提示,听觉消息)车辆,基础设施,行人组混合交通VR
学生教练手册v2.0轻松自我...
学生教练手册本手册指导物理疗法的学生担任步行途径的教练,并向学生介绍这项关键原则,这些原则是这种交付模型的零部件,可以轻松进行散步。本手册中嵌入的广泛的学生学习目标是1。向学生介绍人口健康,健康教练,动机访谈,行为改变的跨理论模型和成功交流的要素。2。要学习如何与老年人一起使用轻松计划来指导步行计划,并了解支持步行计划的证据。3。要整合并运用人口健康,健康教练,动机访谈,行为变化的跨理论模型以及与步行者的成功交流的要素。学生教练计划为关节炎基金会自我指导的轻松计划的参与者提供了内容和计划。本手册为参加健康教练计划的物理治疗学生提供了一周的指导和任务。关于轻松计划忠实计划的票据富达计划是指与轻松的教练(和参与者)的步行程度如何以轻松的计划设计跟随步行。本教练手册的编写是为了确保计划保真。轻松步行是一个基于证据的计划,可改善参与者的健康和功能并减轻疼痛。程序交付与步行的原始设计不一致,可以轻松地降低获得所需结果的可能性。作为一名学生教练,您的工作是指导参与者并回应参与者的担忧,但不要通过轻松计划改变步行。如果您找到了需要更新或编辑的一部分,请通过jchevan@springfieldcollege.edu与Julia Chevan博士联系。
moog-f3834-1.pdf
乘用车应用。。。。。。。。。。。。。。。。。。。。。8 讴歌 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。8 积分。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。8 个图例。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。10 阿尔法罗密欧 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。12 蜘蛛速度。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。12 美国汽车公司。。。。。。。。。。。。。。。。。。。。。。。。12 位大使。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。12 美国 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。14 AMX 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。15 协和 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。17 鹰 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。19 鹰冠回来。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。20 Eagle SX/4 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。22 小魔怪 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。23 侠盗猎车手 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。25 大黄蜂 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。25 标枪 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。27 马林鱼 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。28 斗牛士 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。29 步行者。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。31 漫步者。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。32 漫步者经典 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。33 叛逆者。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。33 精神 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。35 阿斯顿·马丁 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。36 DB6 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。36 拉共达 V-8 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。36 奥迪 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。37 80 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。37 90 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。39 100 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。41,200 涡轮增压。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。42 4000 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。43 5000 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。44 轿跑车。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。45 狐狸 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。47 四。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。47 V8 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。48 宝马 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。49 3.0 系列。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。49 318 系列。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。50 320 系列。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。51 325 系列。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。52 524TD 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。58 525 系列。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。60 528 系列。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。61 530 系列。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。64 533i 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。65 535 系列。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。66 630CSi 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。69 633CSi 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。70 635CSi 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。72 728i 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。73 732i 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。73 733i 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。74 735 系列。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。75 750 系列。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。77 1500 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。79 1600 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。79 1800 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。79 2000 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。79 2002 年系列。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。80 2500 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。80 2800 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。80 L6 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。80 L7 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。80 M3 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。81 M5 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。82 M6 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。84 别克 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。85 阿波罗 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。85 百夫长 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。87
第一阶段(新公路布局) - 伦敦市议会
Gateway 5 计划于 2025 年夏季建成。设计概述 4.2 圣保罗环形交叉路口改造项目将部分拆除 20 世纪 70 年代在 Newgate 街和伦敦博物馆圆形大厅之间引入的环形交叉路口系统。新的公路布局将在 Newgate 街、Montague 街和圣马丁大广场的部分路段引入双向通行,并在 Angel 街引入西行车流。这些变化将使 King Edward 街南段关闭,以创建新的公共空间 Greyfriars 广场。该项目将为步行、骑车和骑自行车的人推出一系列改进措施,同时也允许公共汽车和一般交通顺利通过该地区。步行(附录 5 - 幻灯片 1) 4.3 近 1,500 平方米的现有道路将被改造成新的人行道空间。这包括 King Edward 街的南端,该项目将通过缩短过街距离和在人们想要过街的地方增加新的过街点来改善过街情况。与小街(不受控制的过街点)的交叉口将被提升到人行道水平。这将优先考虑步行者,并加强了《公路法》对司机在过街时让路给行人的要求。骑自行车(附录 5 - 幻灯片 2) 4.4 提案将引入超过 800 米的东西向和南北向自行车道。只要空间允许,这些车道将受到保护,为整个项目区域提供更安全的自行车基础设施。 4.5 在 Newgate 街,将双向引入受保护的自行车道,这意味着向东前往 Cheapside/New Change 的人们将不再

人类寿命的人脑网络中的局部结构功能关系
人类连接组是将大脑区域彼此联系起来的一组物理途径。经验和计算机研究表明,该网络的结构有助于塑造大脑区域之间功能耦合的模式。为了更好地理解结构和功能之间的这种联系,越来越多的研究从结构连接性中得出了几何,动态和拓扑预测因子,以便对相关结构进行预测。然而,这些研究通常专注于使用一组受限制的预测因子的全局(全脑)预测。在这里,我们研究了广泛的预测因子,并将重点转移到功能耦合的局部(区域)模式的预测上。我们表明,在全球范围内,没有一个单独的预测因子很好地形成,即使是最佳预测因子也是在很大程度上受到其预测直接连接区域之间功能耦合的能力的驱动。然后,我们使用相同的预测因子来对局部耦合进行预测,并找到明显的改进。值得注意的是,最可预测的局部FC与感觉运动区域相关,这些区域是根据拓扑相似性,随机步行者的平均第一个传递时间以及大脑在欧几里得空间中的嵌入。然后,我们证明,通过使用多线性模型结合多个预测变量的预测能力,我们可以进一步改善本地预测。最后,我们研究了整个人类寿命的全球和局部结构功能耦合如何变化。我们发现,在全球范围内,耦合的幅度随着生物年龄的增长而减小,这与多步路径的数量增加相似。我们还表明,在局部结构功能耦合以高阶认知系统保存,但优先在感觉运动系统中随着年龄而降低。我们的结果阐明了跨大脑皮层的结构连接耦合的异质景观,并有助于随着年龄的增长阐明其变化。

整个寿命的人脑网络中的局部结构功能关系
人类连接组是将大脑区域彼此联系起来的一组物理途径。经验和计算机研究表明,该网络的结构有助于塑造大脑区域之间功能耦合的模式。为了更好地理解结构和功能之间的这种联系,越来越多的研究从结构连接性中得出了几何,动态和拓扑预测因子,以便对相关结构进行预测。然而,这些研究通常专注于使用一组受限制的预测因子的全局(全脑)预测。在这里,我们研究了广泛的预测因子,并将重点转移到功能耦合的局部(区域)模式的预测上。我们表明,在全球范围内,没有一个单独的预测因子很好地形成,即使是最佳预测因子也是在很大程度上受到其预测直接连接区域之间功能耦合的能力的驱动。然后,我们使用相同的预测因子来对局部耦合进行预测,并找到明显的改进。值得注意的是,最可预测的局部FC与感觉运动区域相关,这些区域是根据拓扑相似性,随机步行者的平均第一个传递时间以及大脑在欧几里得空间中的嵌入。然后,我们证明,通过使用多线性模型结合多个预测变量的预测能力,我们可以进一步改善本地预测。最后,我们研究了整个人类寿命之间的全球和局部结构函数耦合差异。我们发现,在全球范围内,耦合的幅度随着生物年龄的增长而减小,这与多步路径的数量增加相似。我们还表明,在局部结构功能耦合以高阶认知系统保存,但优先在感觉运动系统中随着年龄而降低。我们的结果阐明了跨大脑皮层的结构功能耦合的异质景观,并有助于随着年龄的增长而阐明其差异。